 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- Conspectus
-
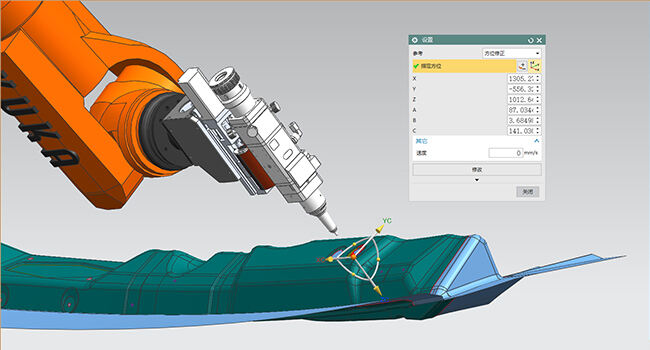
Optimizatio intelligentis positionis
-
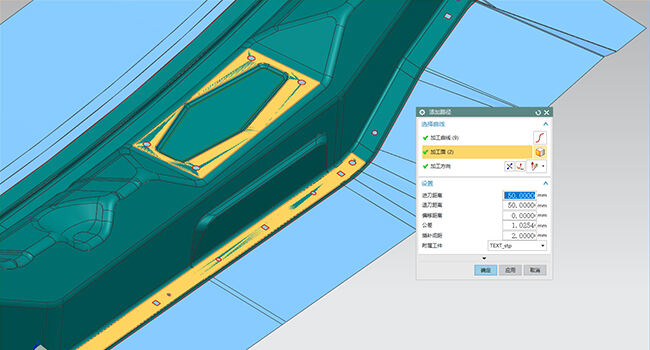
Unus clavis generare trajectoriam
-
Transitio lenis pro trajectoria -
Controllo multiformis axis externi -
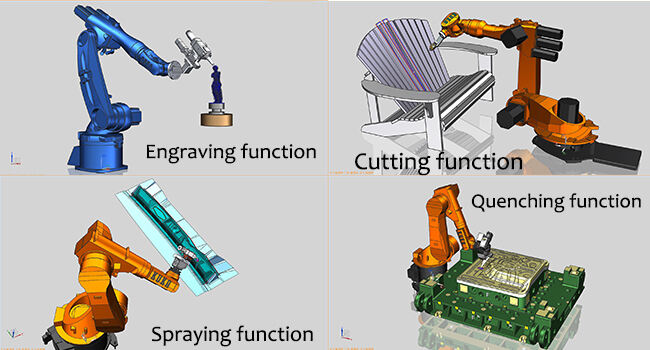
Auxilium cum varietate processuum -
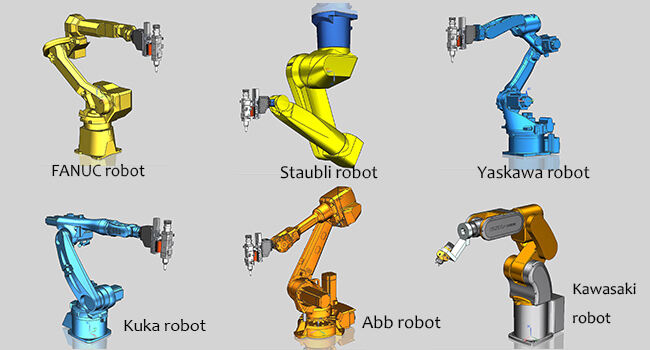
Auxilium cum varietate marcarum robotarum
-
Incisio laser bidimensionalis -
Incisio laser tridimensionalis
Minyue Technology - peritus in applicatione intelligentiae roboticae, concentrandum in systemate visionis laser et productis software programmatum offline robotorum industrialium
Cum objecta operativa robotorum industrialium fiant uberiora, accurateiora et complexiora, Sub praesidiis maiorum requisitionum a partibus societatum propter efficientiam productionis, traditio programmationis manualis online magis magisque non potest satisfacere necessitatibus celeris, altae praecisionis et efficientis processing robotarum.
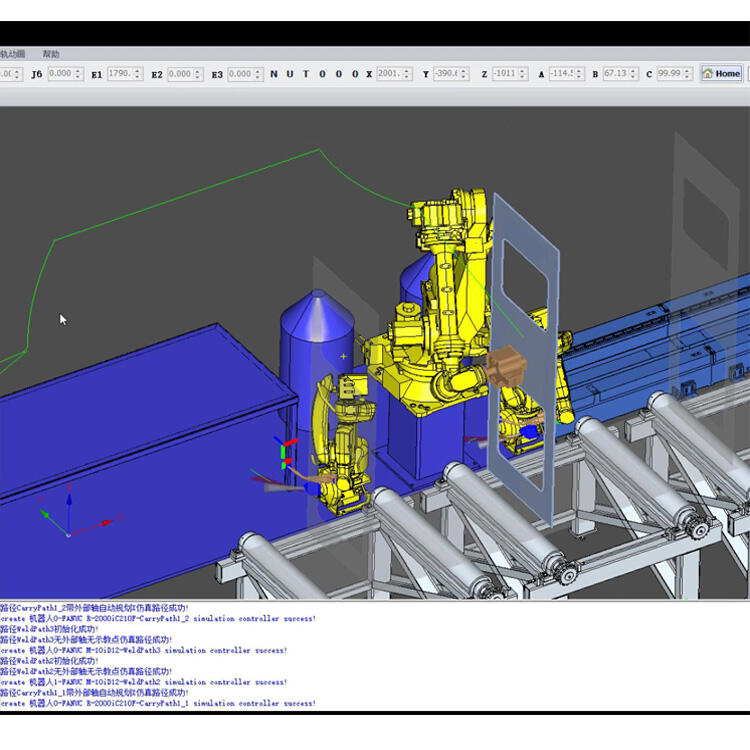
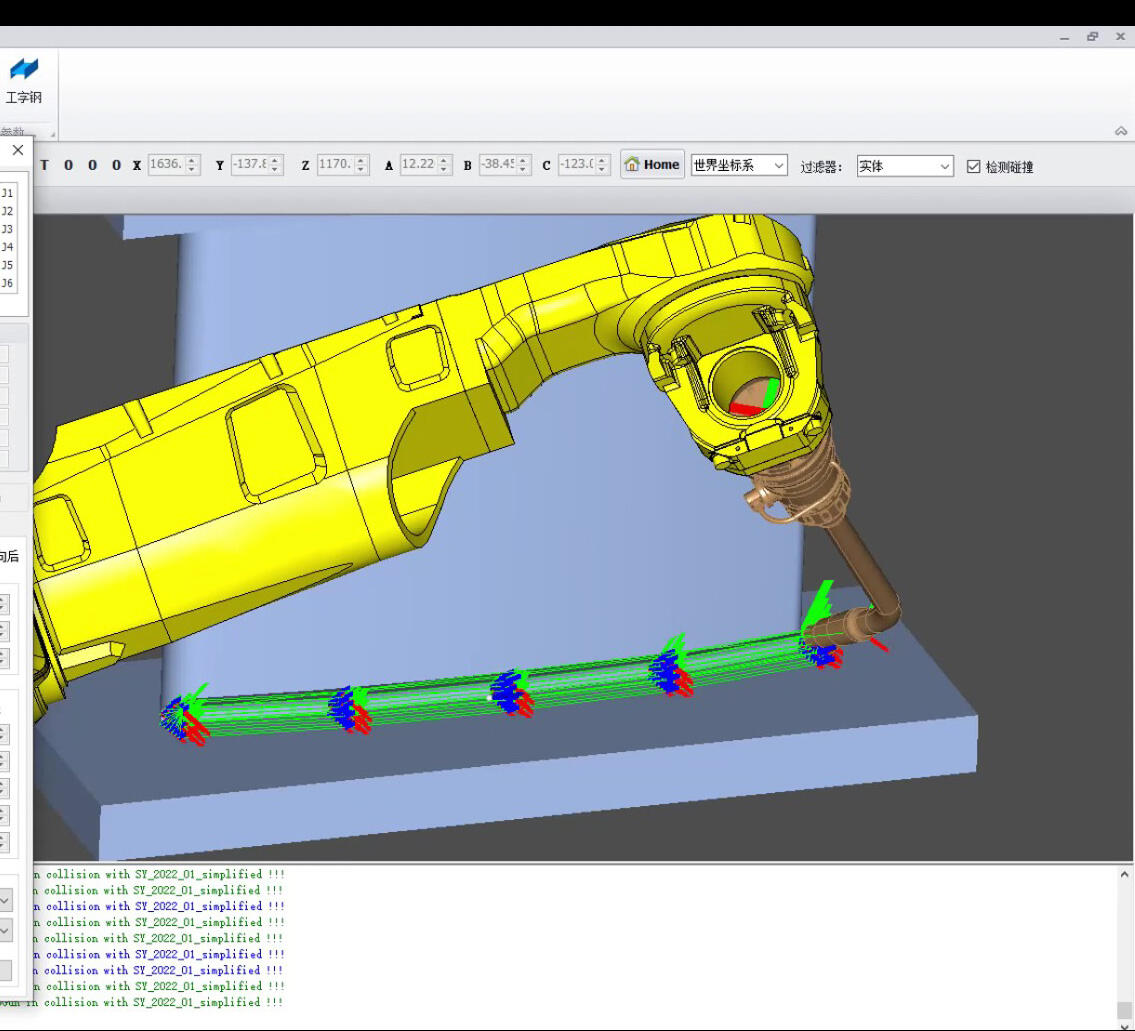
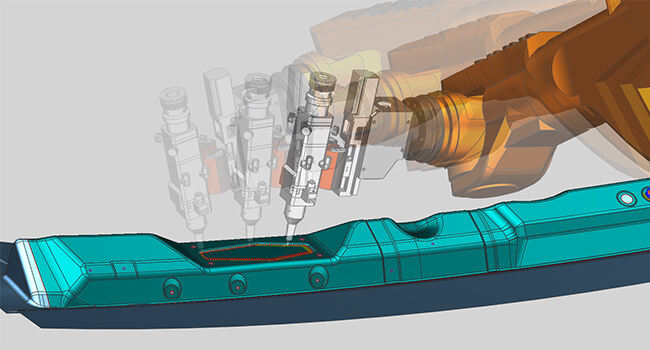
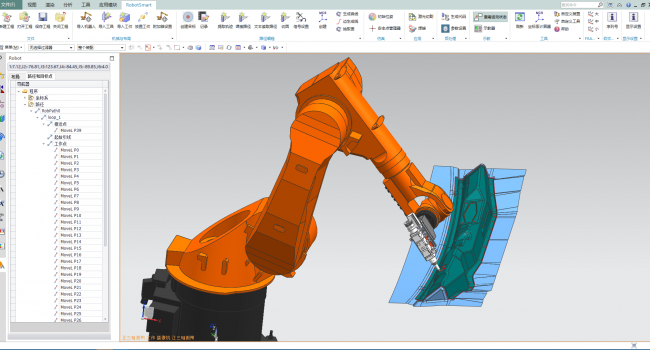
RobotSmart, software programmationis extra-ligatae a Minyue Technologia independentiter developpta, quae traditiolem programmationem manualem complexam robotarum industrialium substituit et celerem "simplicem" programmationem robotarum industrialium realizzat. Per optimisationem itineris et compensationem erroris, efficiencia operativa et accuracies processus robotarum industrialium meliorantur. Uti algorithmo planningis positionis et viae robotis intelligentibus, statio virtualis in spatio virtuali 3D construitur, coniuncta cum technologiis specificis sicut fusiuncula, sectio laser, pulverizatione et aliis ad designum ritmum et programmationem autonomam roboticam industrialem realizzandum. Software integrat simulationem motus robotis, detectionem collisionis, declinationem singularitatis et detectionem limitis axis. Systema continet modulum compensationis erroris robotis, qui potest magnam reductionem influentiae accuratiae absolutae positionis robotis et erroris modello operis in processu actuali realizzare. Producta iam latissime in industria sectionis, fusiunculae, pulverizationis, incisionis et aliarum operationum robotarum industrialium sunt usitata.
Ut clientibus praestet software programmationis offline potentior, intelligentior et professionalior!
1. Praebere solutiones systematis integralis pro programmatione robotorum industrialium
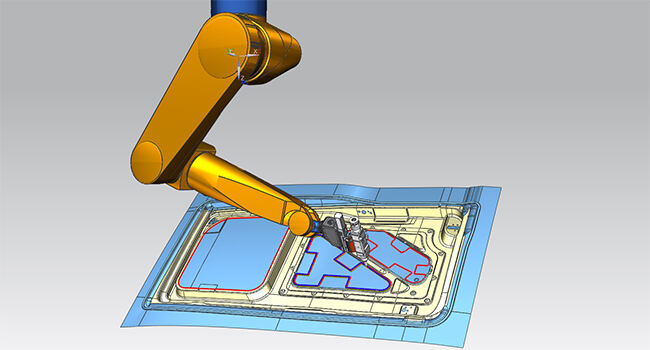
2. Supportare applicationes processuum ut sectio laser, coniunctura, perfrigatio, aspersio, frictio et alia
3. Supportare simulationem catenae roboticae multiformis, detegere collisiones, designare et planificare rhythmos
4. Supportare KUKA, Yaskawa, Fanuc, ABB, Staubli, Kawasaki et alios robotores industriales.
Operatio facilis et applicatio intellegens sine necessitate codificationis programmatum. Operatio modularis et celeritas in addiscendo
Casus Applicationis
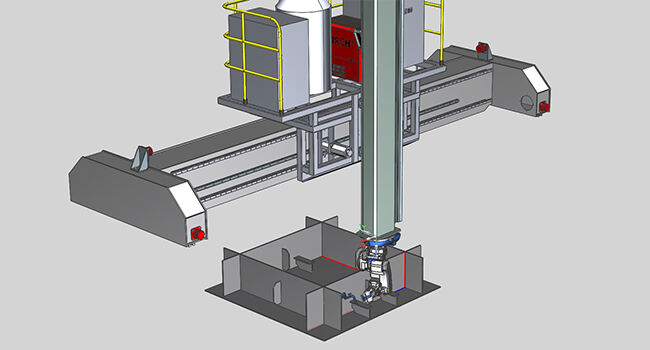
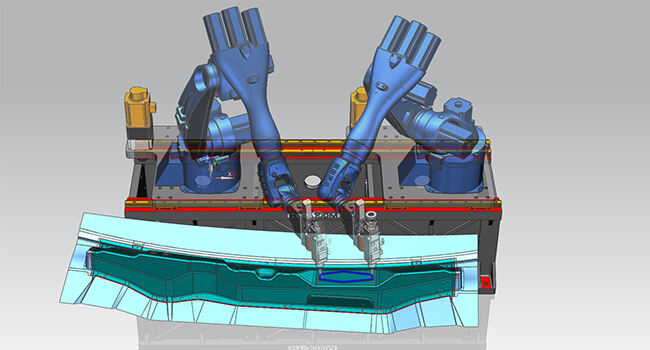
Statio operis coniunctionis cum nexione 9-axis
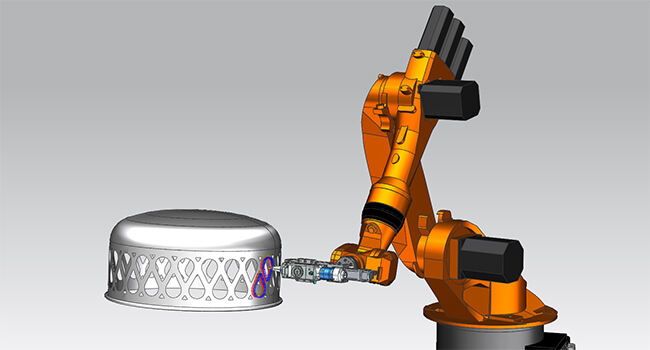
Statio operis intemperationis






