 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Есік шеберлік типі IИнтеллектуалды Жұптау Роботы Станциясы сталдық қосымша үшін

Жер шыңы түріндегі қосу роботы Friendess интеллектуалдық негізгі қосу жүйесі мен кең көркем қашықтықтағы шов треккері бар. Ол Tekla, SolidWorks немесе UG-ден 3D модель файлдарын тікелей інпорттауға мүмкіндік береді, қосу процестерін тікелей сәйкестендіруге мүмкіндік береді, дәл қосу орнын автоматтандырып анықтайды және қосудың ең жақсы оптималды процестерін құрады.
Жерде орналасқан өлшемдік жол баспасы ұзындық бағытындағы ыңғайлылықты арттырады. Робот жерде орналасқан өлшемдік жолмен байланыстырылады, сондықтан одан бір уақытта ұзын шовды кезектесу мүмкін, станция жолдың сол және оң жақтарында істей алады. Оны эсас түрде H-балка қабырғалары, ұстаз қабырғалары, пилон қабырғалары, корбеляр және басқа құрылымдарды кезектесу үшін қолданады.
| Робот | 1 Фанук роботынің жиыны |
| Таңдаулы кезектестіру шыны | Aotai кезектестіру машинасы мен оның қосымшалары немесе Megmeet кезектестіру машинасы мен оның қосымшалары |
| Кезектестіру системы | MINYUE өзгертушісіз offline программалау кезектестіру софтуры, MINYUE лазердік көркемдік отырғызу системы. |
| Қолданылатын сценарийлер | Қабырғалар қабырғалары, корбел элементтері, кіші құрылымдық элементтерге қатысты. Оны қазіргі уақытта сталакты құрылымдардағы H-формалы ерікті балкалар мен екінші балкалар, судық мосттардың кіші және орташа өлшемді қабырғалары, құрылымдардың H-формалы сталдық үстелдері, құрылымдардың платформалық балкалары және басқа құрылымдарда қолдануға болады. |
| Пистолет тазарту системы | SC220A пистолет тазарту системы |
| Жерде орналасқан өлшемдік жол ұзындығы | 6 метр (пайдаланушыға сәйкес несімді) |
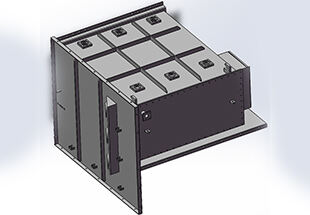
Пистолет тазарту жүйесі
SC220A пистолет тазарту станции роботтық көтеру пистолеттерін тазарту үшін құрылғы. Оны робот көтеру кезінде көтеру пистолетінің шлактарын автоматтандыру, арматураларды автоматтандырып жиындау, пистолет ниппелі мен контакттық басылғышты қорғау, көтеру пистолетінің қызмет кезін дамыту және ақша сақтау үшін пайдаланылады. Жылжымалардың құрал-жабдықтарын қиындастыру, жақсы көтеру сапасын сақтау және көтеру қызметін арттыру. Қысқаша операция және қолайлы пайдалану.
Пистолет тазарту станцияларының плюслері: 1. Пистолет тазарту уақыты қысқа және жүйенің мүмкіндігі үлкен. 2. Қолмен операциясыз пистолет тазарту процесін автоматтандырады. 3. Көтеру кезінде қоп шоғырларына себеп болатын саппен қатынастардан сақтайды. 4. Робот TCP калибровка игласы бар.
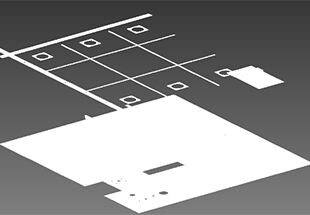
Робот көтеру программасы
Программа автоматтық тәсілмен жауып көрсеткіштері жоқ суреттерден жауларды шешуі мүмкін, бұл элдік қатысуға негізделген іс-әрекеттердің көлемін азайтады. Высокопроизводительный 3D двигатель мен робот контроллерімен, автоматтық түрде жасалған нүктелер симуляцияланады және дәлелденеді, осылайша нақты жұмыстарда қосылуы мүмкін кездесулерden қорғалады.
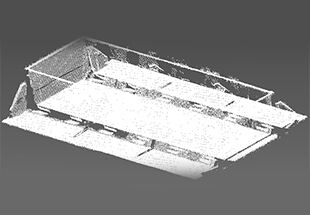
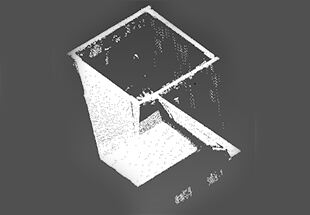
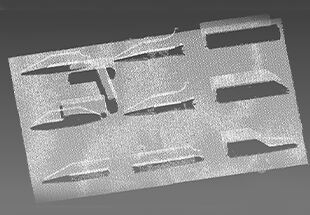
Сурет түрі болмаса да, 3D сканирование арқылы кері моделдеу, 3D суреттерді жылдам құру, робот жау айналасының автоматтық құрылымы, жау айналасын жиімдіту, байланыс визуализациялау, жау пистолетінің қосылуын автоматтық тectкеу.
LDWP-305 лазер треккер
LDWP-305 - зерттеу жолын сканируотын, зерттеушілік сенсор. Ол сызықтық лазердің көмегімен жамбай бөлігінің контурлық мәліметтерін алуға мүмкіндік береді және робот немесе жамбай машинасына автоматтандырылған жамбай процессін орындауға көмектеседі. Сенсордың ішінде сурет табу, өңдеу және жамбай бөлігін тану функциялары орындалады, шығыс компьютерге қажет емес. Оның жоғары интеграция деңгейі бар және системаның жалпы аппараттық траттарын кемиді. Арк пікірлеріне және спаттерге қарсы ыстақтастықпен жамбалардың бөліктерін зерттеу және тану, пайдалану ыңғайлы. Оның әдеттегі құрылымы, кіші өлшемдері, жоғары қолданба деңгейі және көптеген түрлері бар. Ол қолданудың сценарийі бойынша таңдауға және ең жақсы параметрлерді өзгертуге мүмкіндік береді.

Мейірімділік
1. Пескілдер, трас балкалар, держателдер, мостовық бөліктер және панельдік стойкалар сияқты өзге продукtlар үшін оқытусыз қолдау;
2. Дизайн жолында көтерістерді белгілеу қажет емес, 3D салыстырмаларды інportoлғанда мақсатты көтеріс орындары автоматтандырылған түрде шығарылатын;
3. Адамның қосымшасы қажет емес, робот өзі нөлге келу, өту, орын табу, көтеру, саналау және пистолетті тазалау сияқты әрекеттерді автоматтандырып атады;
4. Орналасу орында операция қажет емес, программа барлық уақытта және орында құрылған болуы мүмкін, роботқа қойылған уақыт бойымен қашықтағы түрде жіберіледі;
5. Сіздік программалау, робот қозғалыстарының 1:1 симуляциясы, алдын ала роботтың қарсы келуін және салыстыруларды қорғайды;
6. Диджитал двойник технологиясы робот траекториясын, көтеру напряжендығын, амперажын, жылдамдығын және басқа саналы производствендық ақпаратты реальдік уақытта көрсетеді.
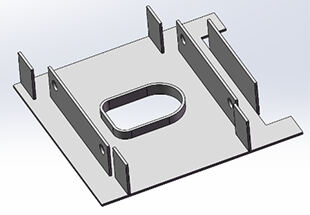
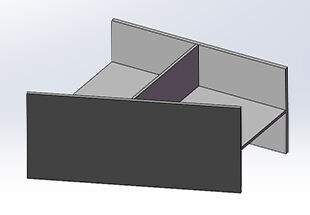
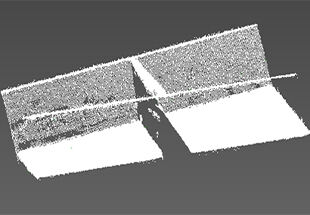
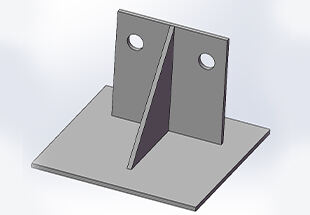
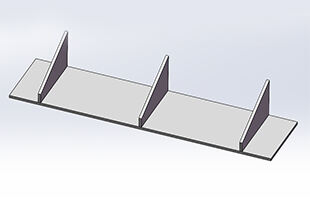
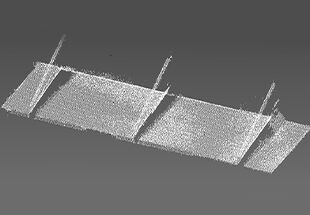
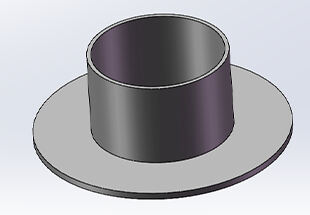
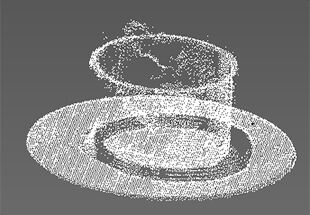
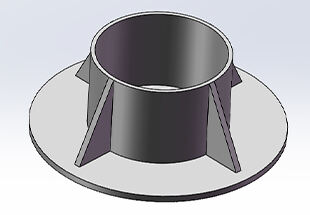
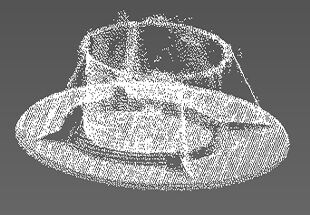
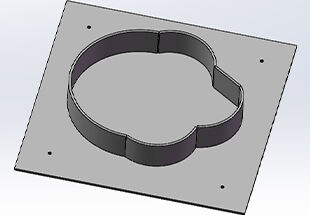
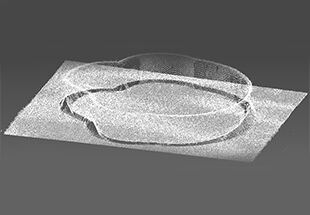
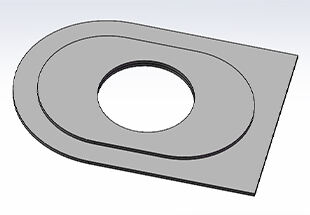
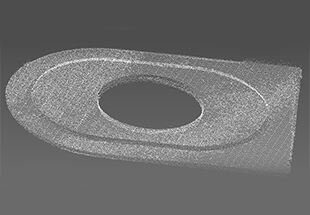
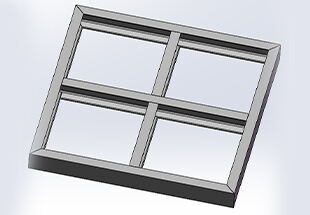
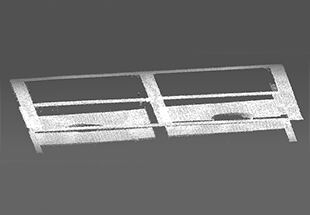
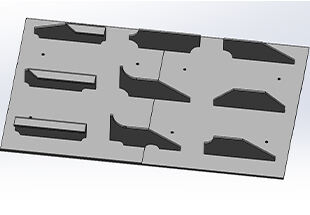
| Жоқ | Құрылғы түрі | Құрылғы моделінің суреті | Құрылғы нүктелер бейнесуреті |
| 1 | H Beam (Бұйым көтерістері бар) | 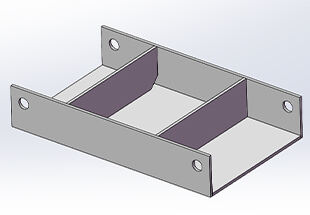 |
 |
| 2 | Панель бөлігі |
 |
 |
| 3 | Қабатты корбел |
 |
 |
| 4 | Буршақпен жасалған |
 |
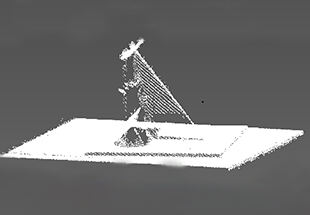 |
| 5 | Паурлы қолдану плита |
 |
 |
| 6 | Шаршы түбірдің негізі |
 |
 |
| 7 | Тік бұрышты шаршы түбірдің негізі |
 |
 |
| 8 | Жерлікті көлемдік |
 |
 |
| 9 | Екі қатырлый доска |
 |
 |
| 10 | Каналдық балка жинақтауы |
 |
 |
| 11 | Екі қоршаған қосымша сварка | 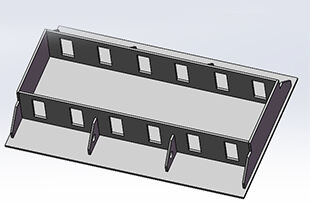 |
 |
| 12 | Қуттық балка |
 |
 |
| 13 | Өзгертпілі қуырғаушылық жұмыстары |
 |
 |
| 14 | Трансформатордың дамбы |
 |
 |





