Лазердік сенсорлар қашықтықты өлшеу және обьектті анықтауда қандай қолданылады? Олар лазерлерді қолданады, бұл - өте дәл өлшеуге мүмкіндік беретін көрінетін рулеткаларға ұқсайды. Сондықтан лазердік сенсорларды қолдану арқылы біз қазір бізден қанша қашықтағы объектті білеміз — істікте, оларды әрекет ету немесе адіетінше өлшеу шаршысын қолдану қажет емес. Лазердік сенсор қалай жұмыс істейді? Обьектпен кездестікten кейін сигнал сенсорға қайтарылатын қызыл луч. лазердік сенсор қашықтықты өлшеу үшін қалам қайта келуіне неше уақыт түседі. Бұл жеке ашықтың қашанда екенін білдіреді. Бұл қатар, қараңғыда навигациялау үшін шабуылдарды пайдаланатын ұшқырлармен сияқты. Ұшқырлар әңгіме шығарады, әңгіме қайтарылғанда, олар қорыққандардың қайда орналасқанын біледі. Лазер сенсорлары ұшқырларға ұқсас нәтижелер береді, бірақ олар әңгімеден емес, соңыраудан пайдаланады!
Көптеген өнімдер жасалатын фабрикаларда, өнімдерді жасау кезінде тиімді тәсілмен дәлдік ең маңызды. Егер машиналар өнімдерді дұрыс орынға кеңестірме немесе кеспе берсе, бұл мәселелерге мәндеді. Лазерлік сенсорлар машиналардың қисықтарды және детальдерді дұрыс орынға қоюын тексеруге мүмкіндік береді. Бұл әдістер өнімдерді дәл және тиімді әрекеттен жасауға мүмкіндік береді, соның ішінде қысыр қателер де көп пулға төлеуді болуы мүмкін. Фабрикалар қолданады жылдам өткізуші лазер сенсоры дәл өнімдер жасау және отбасын азайту үшін.

Деректерді шамалау үшін, мысалы, коридордың uzinaы немесе құрылғының биіктігін шамалау үшін biz пайдаланамыз өнеркәсіптік лазерлік сенсор олар стандартты өлшеу жолдарынан кеңінен анық. Лазер сенсорымен ұзақ мезгілдерді шын және жеңіл өлшеуге болады. Ол еңбектің ішінде қалайсын деп, ол үшін көптеген уақытты, көптеген қиындықты сақтайды, өйткені тяжелдік өлшеу құралдары еңбекшілердің жұмыс істейтінінен бас тартады. Лазер сенсорлары ылғамды дәлдікке ие, бұл өлшемдерге байланысты емдеуімізді қажет етеді, оларды әртүрлі жағдайларда кеңінен пайдаланудың себебі.

Сондықтан роботтар қашықтай қуатты, олар бізге болмайтын әрекеттерді орындауға болады. Мисалы, олар адамдар үшін жетіспейтін халықтарға кіруге болады. Лазер сенсорлары роботтарға қорытындысында қоршаған нesелерден тыс жол алуға мүмкіндік береді. Бұл пациенттердің топтарында қауіпсіздікті сақтау үшін маңызды мүмкіндік. Роботтың лазер сенсор камера системасында болса, ол мүмкін, объектпен кездесу қажет емес екенін білгенге сияқты қозғалуға болады. Бұл фабрикаларда, складтарда, әдетте саудаларда да адамдармен бірге жұмыс істеуге мүмкіндік береді, олардың әртүрлі ролдерде пайдалы болуын жасайды.
Лазердік сенсорлар біз ғана емес, көптеген қызықты әдістерде қолданылады. Мисалы, олар автоматты әріп айналдырушы машиналарға басқа автомобилдерді көру және жол а若您未避免 кез келген таразуларға мүмкіндік береді. Сенсорлар машиналарға басқа автомобилдерден неше жакын екенін сенсингдеу үшін пайдаланылады — сондықтан олар қауіпсіз әріп айналдыру шешімдерін қабылдауға дейін болады. Олар әрі денсаулық сақтау саласында да қолданылады, әрекет етпей отырып пациенттердің негізгі белгілерін көздерге алу үшін. Бұл, әрекет ету қажет емес, немесе патогендерден қорғану қажет болатын пациенттерді басқарғанда әлдеқайда пайдалы болуы мүмкін.
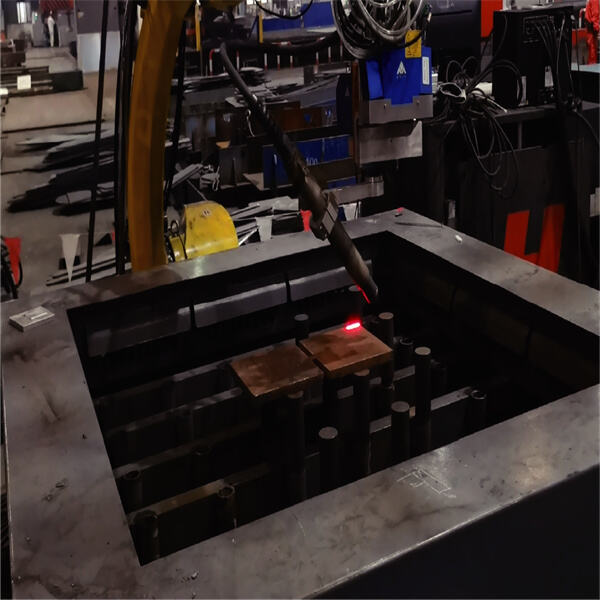
Табу және отбіру функциясын қолдану, шовты сканирование, шов позициясы мен мәліметтерін тастайтын, 3D цифрик модельдеу суреті мен нақты жұмыс есептің арасындағы шов позициясын түзету, және қосымша материалдардың қателері мен термік деформацияға негізделген шектеулі шов проблемасын шешу.
Бейжинг Минюэ Технолоджи Ко.,ЛТД - бұл өнеркәсіп роботтардың негізгі ғылыми-техникалық қызметтерін ұйымдастыратын дүниандық компания. Біз RobotSmart - Роботтық Өңдеу Системасы, SmartVision - Екі Глаздан Тұратын Структуралық Айналымдық Көркіт Системасы және SmartEye - Лазердік Көркіт Жолау Системасын қамтамасыз ететін гибрид өңдеулерге арналған таңбалы шешімдер ұсынамыз.
Тез, дәл, барлық Программалауға жоқ, ырыс тапсырмалы және дәлдікке ие. Ол традиционалды роботтардың күрделі оқыту процесін шешеді және оқыту процесіндегі жұмыс аясын сақтайды.
Көптеген роботтар, көптеген сыртқы осьтер және позиционерлер үшін қызметке сапарлау, бастық жабдықтарын, қорықтық жабдықтарын және ось шектерін анықтау үшін зор қосымша жабдықтармен, қорықтық жабдықтармен және телескоптық орналастыру арқылы қосымша жабдықтар үшін мотивацияландыру. Робот қозғалысын симуляциялау, кездесу тезекеттерін анықтау, тенгестікті қайта жасау және ось шектерін тексеру.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








