 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



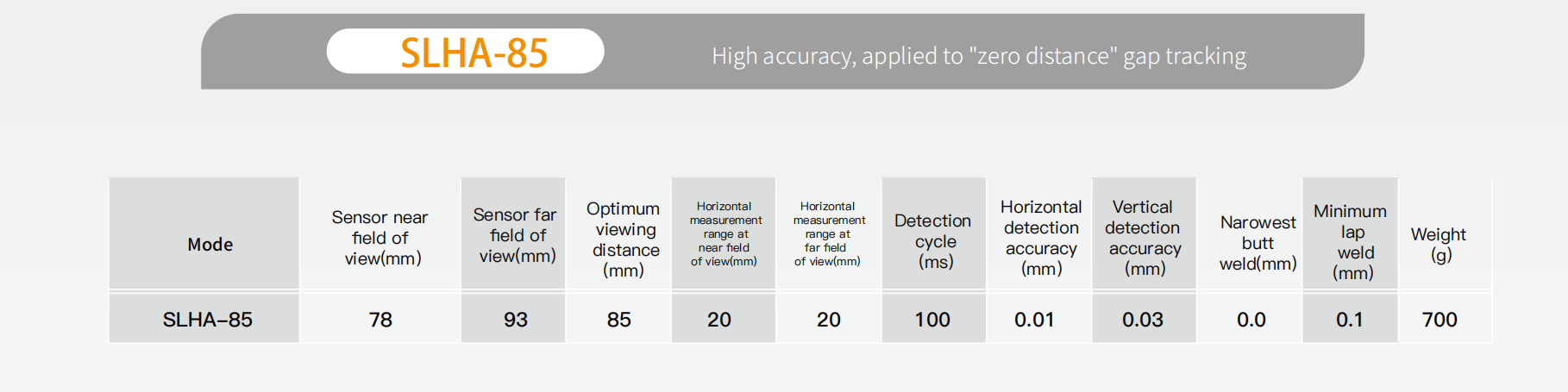
SLHA-85 Лазердік шов жолаушы сенсоры
Позиция табысымен, реальдік уақытта отбір жолындау, скандау және автоматтық қосу функциясы бар.
- Қоңырау
- Робот брендинің қолдауы
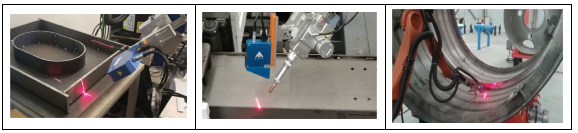
Лазердік шов жолдық сенсоры лазер арқылы көпелгі шовының бетін иртеді, ол үшін лазердік светлік тасын құрады, соның кейін жоғары сапалы камера оны қабылдағыз және суретке ауыстырады. Алгоритмдер арқылы көпелгі шовының үш мөлшерлі қасиеттері структуралық ақпаратқа айналдырылады, бұл ақпаратта көпелгі қосырларының координаттары, жауапсыздықтары, босшалары және басқалары қамтилған. Бұл ақпарат роботтық контроллерге жіберіледі, роботқа көпелу үшін қажет трекjectory және процестік параметрлерді береді, роботты реальдық уақытта көпелу немесе жұмысқа қатынастарды дұрындауға бағыттайды және дәл көпелу жұмысын жеткізеді. Басқа шешімдерге салыстырғанда, лазердік шов жолдық отырғыштық, зейтін дәлдік, жылдамдық және жақсы ыңғайlanу қабілеттері бар.

Сенсор линейдық қабірлік шағындық өлшеу технологиясын пайдаланады, бұл жылдам қатарлы суреттік тізімдеу жылдамдығы, әсер етпелікті, машиналық көбейту әрекеттері жоқ; Күшті әдісіндік қабілет, кеңестер параметрлерін шығару мүмкіндігіне ие; Толық тиімделіктік, сыртқы индустриялық компьютерлермен бірге көптеген басқарма артықшылықтары бар, ол әртүрлі түрлердегі автоматты кеңестерде кеңінен қолданылады. Кеңестер әдісінен бастап, біздің қызметтеріміз әртүрлі кеңестер сценарийлерінде жақсы нәтижелерге сай қалыптастыруға көмектеседі.
Толық графикалық программалық интерфейс, параметрлерді орнату процесі, көмек меню деректері, професиялық емес адамдар да жылдам қосымша болуға болады
*Нөл аралық өңдеу функціясы бар сенсорлар, олар 0,1 мм-ден аса аралықтарды анықтау үшін қолданылатын
*Көрінетін қашықтық тексертілген мәлімет ретінде берілген және оны пайдаланушылардың біртіндеп қажеттеріне сәйкес өзгерту мүмкін
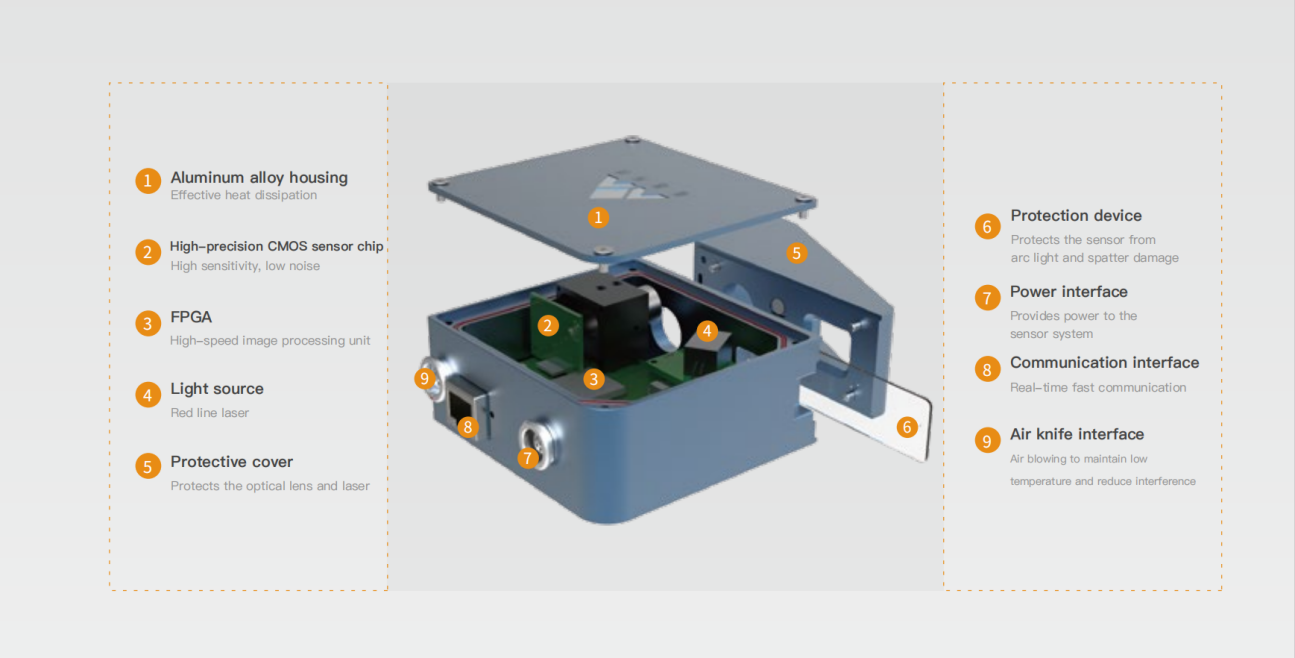
Сенсор қыстау қысымына, суға және қырғызға (IP67) қарсы қарым-қатынассыз, электромагниттік шағындағы әсерге (EMC) қарсы қарым-қатынассыз.
Күшті функцияға ие.
01. орналасу және сапалық түзету
Позиционирование және сапарлық түзету функциясы, өзгеше толеранспен бірдей модельдегі әртүрлі жобалардың гибридті көтеру сценариолары үшін пайдаланылады. Бұл функция жобаларды ауыстыратын уақытта қолмен қосымша емдеулерге потребность жоқ екенін, роботты позиционирование және сапарлық түзету системасының көмегімен дәл көтеру үшін бағдарламалауды taрталады.
Екі нүктелі позиционирование тік түзіндегі 2D сапарлық көтеру үшін қажет.
Көп нүктелі позиционирование көп бөліктен тұратын 2D сапарлық көтеру үшін қажет.
Бөлік позиционирование көп бөлікден тұратын 3D сапарлық көтеру үшін қажет.
02 Реал уақытта қатынау
Реал уақытта қатынау функциясы үлкен дағды және кеңістікте интерференция болмаған көтеру сценариоларында қолданылады. Сенсор көтеру торчағына негізделген тұрақты, және көтеру торчағы автоматты түрде 3D координата деректеріне сәйкес көтеру жолын өзгерту.
03.Сканнирование және автоматты көтеру
Сканирование және автоматтік шыншық функциясы сенсорға бірінші ретпен шыншықтардың геометриялық мәліметтерін жинау мүмкіндігін береді. Бұл функция ыстық-табандалған, төмендегі шыншық орындары мен күрделі шыншық сценарийлері үшін қолайлы.
Лазер шын ауыстыру
Лазер шын ауыстыру ыстық, табандалған және сол және оң шын шебершектерін анықтауға болады.
Кіші бос орындар бар шыншықтарды анықтауға болады.
Жалбыз пластина шыншықтарын ауыстыру проблемасын шешеді.
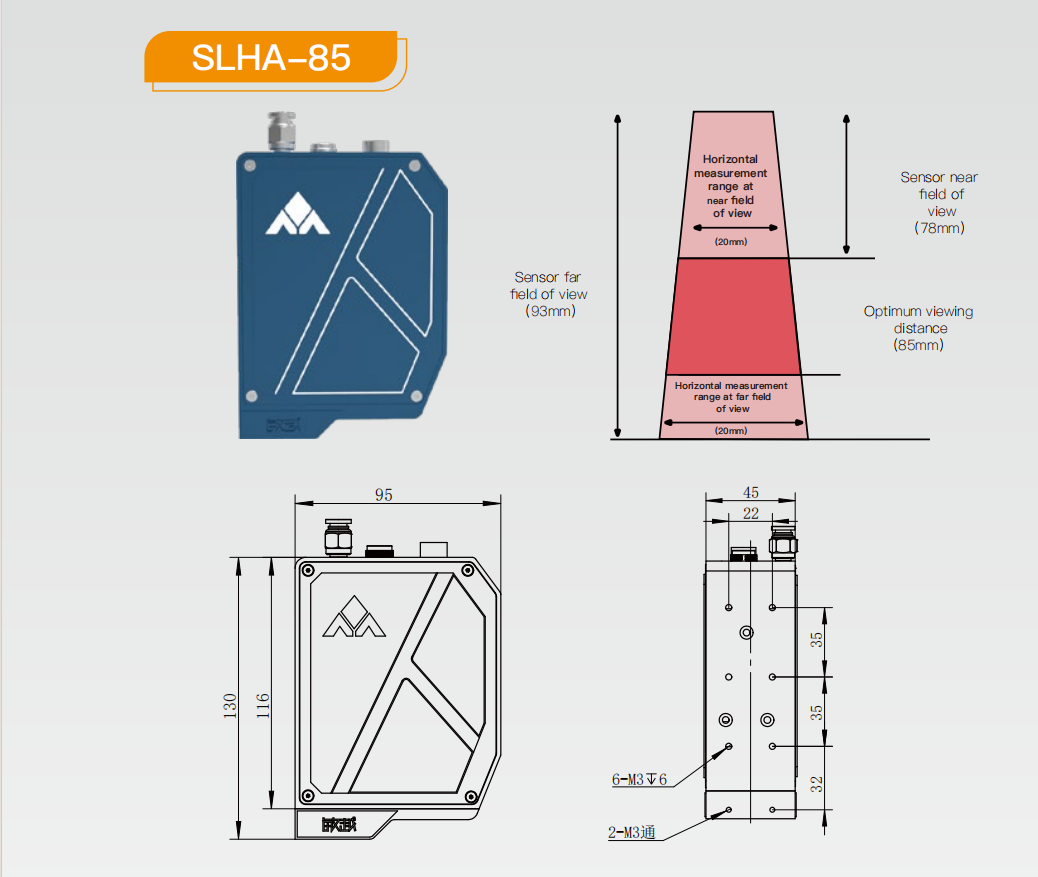
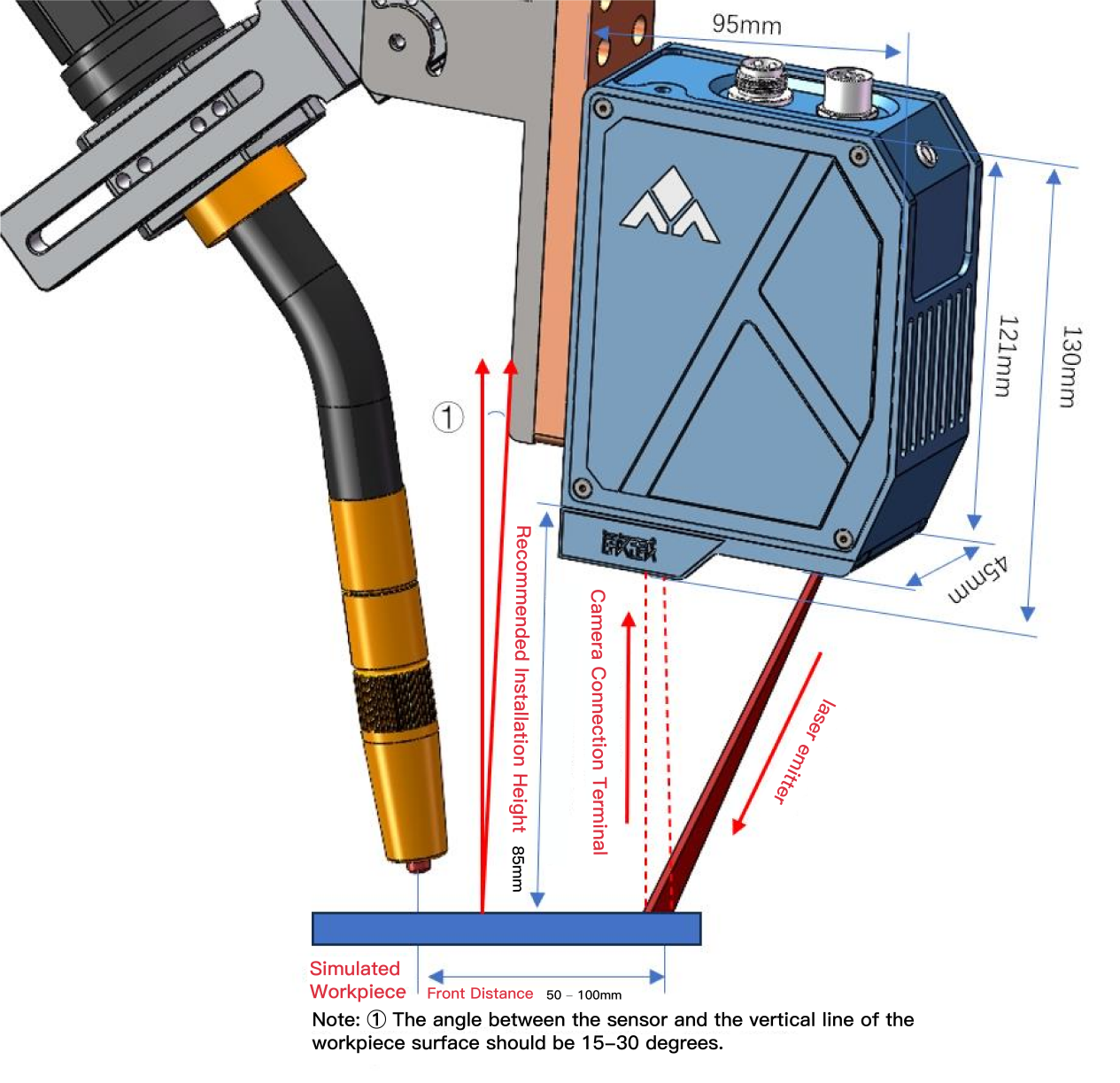
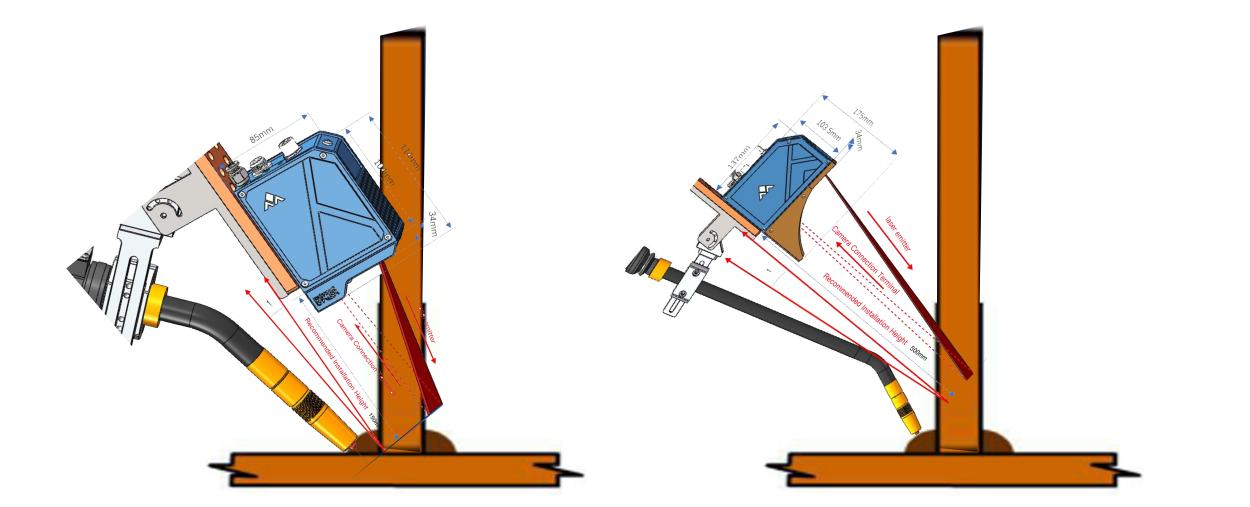
Оптималды көру мезгілі тәжірибелік 85 мм.
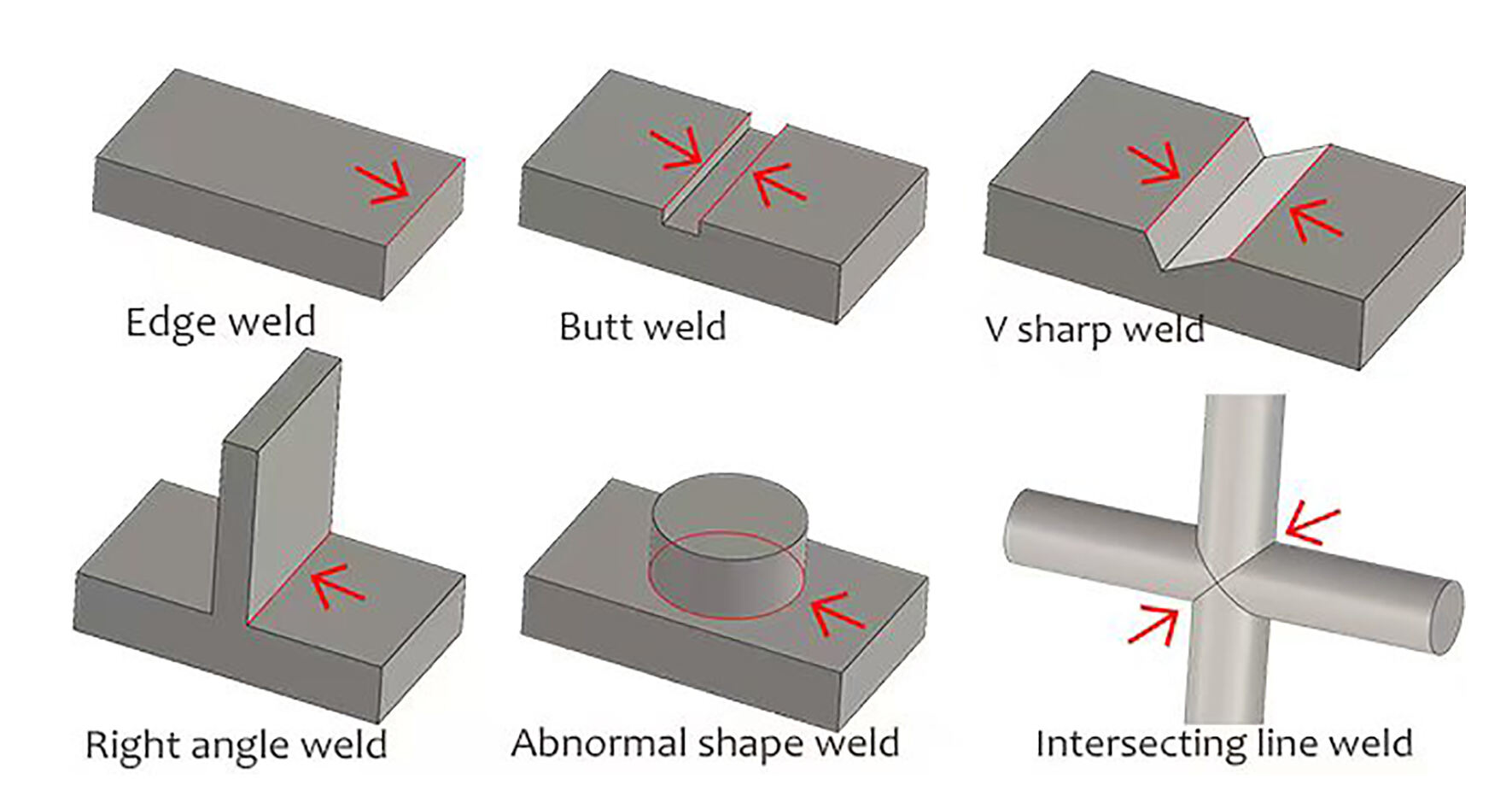
Шын түрін қолдау
V-шын шыншық
Бұрыштық шыншық
Гемминг шыншық
Спайка жұмсауы
Жақындағы спайка және т.б.
Дене дәлдікте, нөл қадамды спайка. нержа спайка санاعةсына үшін қатысты.
Көк лазердік шығыс пайдалану арқылы үлкен отырғылықтық шығыс және табиғаттық қоршағанда. Алуминийтік алLOY процессінде лазердік жұмсау үшін арнайы дайындалған.
• Жұмыс істейтін объектілердің сенсорға тіркелуін қорғау үшін, робот ығысуынан әдетте 20КГ-ға дейінгі нормалдық пайдасы бойынша қажетті түрде түрін таңдаңыз.
Ынтымақтастық серіктесі

Робот брендинің қолдауы






