Біздер әріптегі, роботтармен жұмыс істеу қиын болуы мүмкін, бірақ сізде дұрыс мәліметтер және практика бар болса, ол қолайлы болуы мүмкін. MINYUE сізді роботтармен жұмыс істеудің ең жақсы тәсілмен таныстырудың мақсатында. Бұл күрделі роботтармен жұмыс істеу туралы сипатталады роботтармен жұмыс істеу системасы , қалай орнын ауыстыруын басқаруға болады және қалай қауіпсіз және маңызды түрде орындауға болады.
Біріншісі, роботтар туралы. Екі негізгі түрдің роботтардың екі негізгі түрі бар: тұрақты роботтар және көшетін роботтар. Тұрақты роботтар дейін, олар қозғалмайтын роботтар. Олар factory-лерде компоненттерді біріктіру сияқты мисоилерді орындау үшін пайдаланылады. Кешіріңіз, көшетін роботтар ортақтағы ортамдарды навигациялау және орналасу үшін жасалған. Бұл роботтар доставка немесе соңыру мақсатында пайдаланылатын көшетін роботтардың түрі. Бұлардың арасында айырмашылықты түсіну маңызды, себебі ол сізге қажетті місірді орындау үшін дұрыс роботты таңдауға мүмкіндік береді.
Инді МИНЮЕ роботын басқаруды талқылаямыз. Роботты қозғалтудың негізгі интерфейсі жоярмак немесе төрт атауға сәйкес келетін түймелер жиыны болуы мүмкін, олар роботтың қозғалысын басқару үшін пайдаланылады. Түймелеулермен жұмыс істей отыру маңызды, сондықтан робот қалай қозғалады және қалай жауап береді, сізге таныс болады. Робот программалау үшін код деп аталатын talqynlar tobyn yaza alamyn. Бұл код роботқа қалай қозғалуы тиіс және қандай міндеттерді орындау керек екенін айтады. Роботтарды басқаруды үйренуге қажет, себебі оның негізгі қабілеті - бұғында программалау.
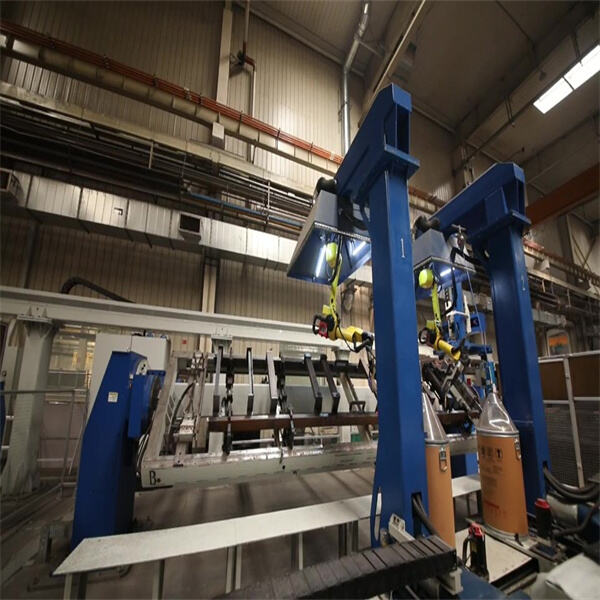
Роботтарға күрделі тәсілдермен қозғалу қажеттігі де бар, және бұл көп жағдайда қиын болуы мүмкін. Бірақ бұл істер бір бөліктерге бөлінсе, оларды басқаруға болады. Мисалы, сенең салоның бір жағынан екінші жағына роботты алу керек. Біріншіден, роботты дұрыс бағытта орналастыру қажет. Содан кейін роботты алға шығарып, соңында айналдыру арқылы, сіз оны қажетті орнаға жеткізе аласыз. Бұл MINYUE автоматты материалды өңдеу роботтары роботты басқаруға жеңіл. Сенсорларды да пайдалану мүмкін, олар роботқа қоршағын түсінуін көмектеседі. Сенсорлар роботқа қосымшалардан тыс жолдауға және жылдамдықпен навигациялауға мүмкіндік береді, бұл сіздің жұмысыңызды жеңілдетеді.

Роботты басқаруда жақсы болуға қarama-қайшылықпен өткен уақыт - салынған уақыт. Және сіздің тренингіңіз көбейтілгенде, роботқа таныстырылатында, оны басқаруда сіздің індетіңіз артады. Роботтың бағдарламалауын дәмді меңгерту арқылы да біліміңізді жетілдіре аласыз. Ол сіз жазған кодға негізделген роботтың қозғалыс жолдарын және ерекше іс-әрекеттерін жақсартатын негізгі өзгерістерді аяқтауға мүмкіндік береді. Тәжірибелік жұмыс жасау мен қажетті жағдайларда өзгерістер жасау арқылы, роботты басқарудағы роботтық көлік жалғаушы білімдеріңіз өте көп жетілдеседі.

Роботтармен жұмыс істей келгеннен кейін, қауіпсіздік басқалардың алдындағы маңызды мәселелердің бірі. Сіз қауіпсіздік қою шарттарын және процедураларын әрдайым қамтидыңыз, сондықтан сіз және басқалар қауіпсіз болады. Роботтармен жұмыс істей отырсыз, олар екі еле сенгісіз қозғалуы мүмкін, сондықтан қорытындыңызға айналыңыз. Әрекеттерді тиімділестіру үшін керек жұмыстың қажетті роботын орындап отырғанын тексеріңіз. Мысалы, қалайына қалай ауыр өнімдерді қозғалту керек, онда сіз ауыр өнімдерді қысқарту және қабылдау үшін дайындалған роботты пайдалануыңыз керек. Сонымен қатар, сенсорлар мен автоматтық процесстер сізге уақыт пен энергияны азайту үшін көмектесуге мүмкіндік береді. Автоматтық процесстер сізге жұмыстың бір бөлігін орындауға мүмкіндік береді, сондықтан сіз уақытты сақтау және жұмысыңызды қысқартуға болады.
Тез, дәл, барлық Программалауға жоқ, ырыс тапсырмалы және дәлдікке ие. Ол традиционалды роботтардың күрделі оқыту процесін шешеді және оқыту процесіндегі жұмыс аясын сақтайды.
Бейжинг Минюэ Технолоджи Ко.,ЛТД - бұл өнеркәсіп роботтардың негізгі ғылыми-техникалық қызметтерін ұйымдастыратын дүниандық компания. Біз RobotSmart - Роботтық Өңдеу Системасы, SmartVision - Екі Глаздан Тұратын Структуралық Айналымдық Көркіт Системасы және SmartEye - Лазердік Көркіт Жолау Системасын қамтамасыз ететін гибрид өңдеулерге арналған таңбалы шешімдер ұсынамыз.
Көптеген роботтар, көптеген сыртқы осьтер және позиционерлер үшін қызметке сапарлау, бастық жабдықтарын, қорықтық жабдықтарын және ось шектерін анықтау үшін зор қосымша жабдықтармен, қорықтық жабдықтармен және телескоптық орналастыру арқылы қосымша жабдықтар үшін мотивацияландыру. Робот қозғалысын симуляциялау, кездесу тезекеттерін анықтау, тенгестікті қайта жасау және ось шектерін тексеру.
Табу және отбіру функциясын қолдану, шовты сканирование, шов позициясы мен мәліметтерін тастайтын, 3D цифрик модельдеу суреті мен нақты жұмыс есептің арасындағы шов позициясын түзету, және қосымша материалдардың қателері мен термік деформацияға негізделген шектеулі шов проблемасын шешу.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









