 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Gaussian განათლების გარეშე სირკონის სტრუქტურის განძი ინტელექტუალური სველდინგის რობოტი

Სიმრავლის განრჩევის რობოტული სისტემა
Ეს მოწყობილობა არის სპეციალური სიდიდების რობოტი სიმრავლისთვის, რომელიც შექმნილია ავტომატური წარმოებისთვის სიმრავლის ფაბრიკებში.
Ეს მოწყობილობა არის სპეციალური სიდიდების რობოტი სიმრავლისთვის, რომელიც შექმნილია ავტომატური წარმოებისთვის სიმრავლის ფაბრიკებში.
1. მოწყობილობა ძირითადად შედგება: რეილის ელემენტები, განრჩევის ელემენტები, რობოტის რეგულირების ელემენტები, ელექტროკონტროლის კასეტის ელემენტები, სიდიდების მძღოლის ელემენტები და ა.შ.
2. განტის კომპონენტები ძირითადად შედგება გადაადგილების ბოლო ფრეიმის, ჰორიზონტული ბირთვის, და კორექტირების ფრეიმის გარეშე. გადაადგილების ბოლო ფრეიმი, ჰორიზონტული ბირთვი და კორექტირების ფრეიმი ყველა გამოიყენება კარის ბირთვის სველი სტრუქტურას, და შემდეგ წვდომის შემცველ დამუშავებას წარმოადგენს. სტრუქტურა კომპაქტურია და გარემო ლამაზია.
3. მთლიანი მანქანის აქტიური გადაადგილების ბოლო ფრეიმი იყენებს იაპონურ პანასონიკ AC სერვო დრაივერს და მოტორს იაპონურ SHIMPO რედუქტორის გამოყენებით, და შემდეგ ხის და ჭარბის გადაცემას. ჰორიზონტული მისამართის რკალი ინსტალირებულია გადაადგილების ბოლო ფრეიმის მხარეს. რკალი შეიძლება ჩაწეროს მისამართის რیლზე მისი ეკსცენტრული ღერ Gaussian-ის გამოყენებით, რათა დაუზუსტოს მთლიანი მანქანის მუშაობის მუდმივობა და ზუსტობა.
4. ტარიფის მოძრაობანი რელინგები ყველა შექმნილია 38KG/M-ზე. რელინგების გარე მხარეებზე მდებარეობს ზუსტად მუშაობით შემუშავებული რეკვები. რეკა შემოწმდება 45 მასალისგან, რომელიც მოდულით 2.0-ია. გამოიყენება გარკვეული მეთოდი მოძრაობისთვის. რელინგები დაკავებულია წინაპირი და შემდეგი დაფარვის პლატფორმების მეშვეობით. ეს ინსტალაციის მეთოდი უზრუნველყოფს მნიშვნელოვან ტექნიკურ პარამეტრებს, როგორიცაა ორი რელინგის განსაზღვრული წრფივი წრფივობა და პარალელურობა.
Დახმარება არა-სწავლის ინტელექტუალურ საჭირო სიდიდე განსხვავდება Drawing ტიპის 3D ხატულის იმპორტი, საჭირო სიდიდის ავტომატური გამოყოფა, რობოტის საჭირო სიდიდის ავტომატური გენერირება, მდგომარეობის ვიზუალიზაცია, საჭირო სიდიდის ავტომატური გამოკვლევა.
Რობოტის საჭირო სიდიდის ავტომატური გენერირება, მდგომარეობის ვიზუალიზაცია, საჭირო სიდიდის გენერირება, საჭირო სიდიდის ავტომატური გამოკვლევა.
Და არაა ხატულის ტიპი, 3D სკანირება შებრუნებით მოდელირება, სწრაფი 3D ხატულების გენერირება, რობოტის კავშირის ტრაექტორიის ავტომატური გენერირება, კავშირის ტრაექტორიის ოპტიმიზაცია, მდგომარეობის ვიზუალიზაცია, კავშირის ჩარბის კოლიზიის ავტომატური გამო探ვება.
Პარამეტრი
| Მუშაობის ნაირთის მაქსიმალური სიგრძე | 11M |
| Ფლანჯის სიგანე | 2,5 მეტრი |
| Განრიგის მოძრაობის რეილის გამავალი | 2800 მმ |
| Განრიგის მოძრაობის მოტორის ძალა | 2x0.75 kW |
| Განრიგის მოძრაობის საჭრელი სიჩქარე | 100-1000 mm/min |
Შედუღების რობოტი
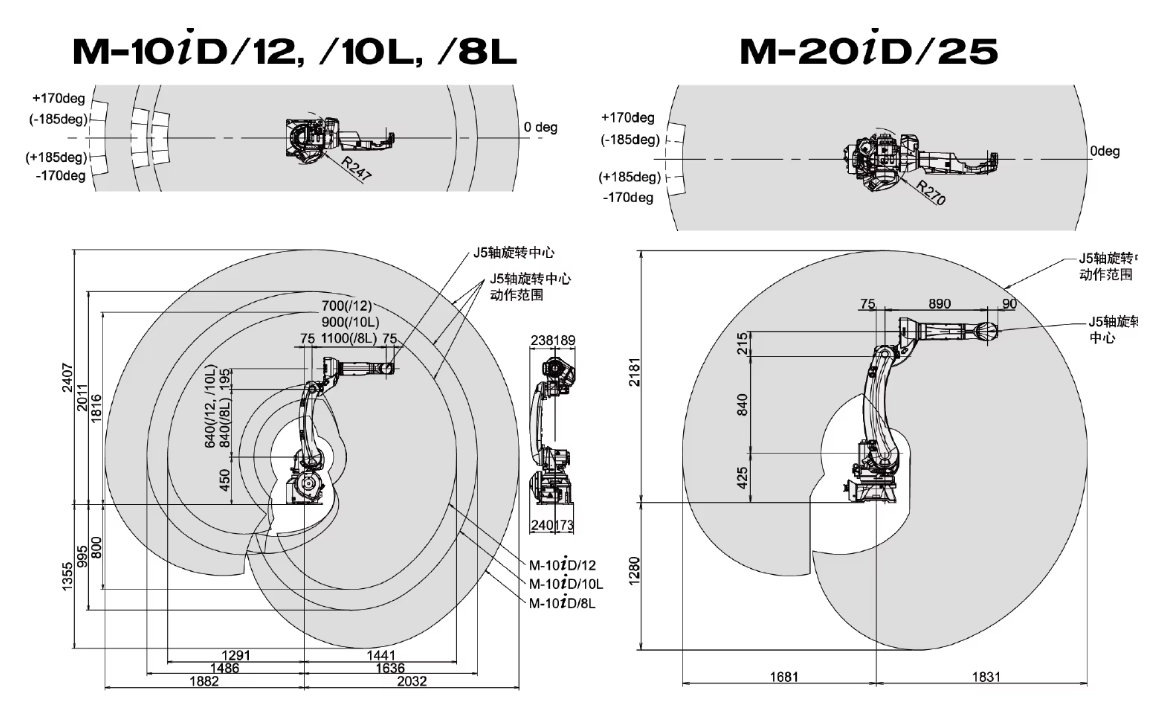
Იყენება იაპონეთში შემოღებული FANUC საჭრელი რობოტი. რობოტის კონკრეტული პარამეტრები არის შემდეგნაირად.
LDWEP-500 ლაზერული ტრეკერი
LDWEP-500 არის ინტელექტუალური ხაზოვანი სკანირების სენსორი სველის გამოყენებით. ის მიიღებს სველის სექციის კონტურულ ინფორმაციას ხაზოვანი ლაზრის სკანირებით, რომელიც საშუალებას ძალადებს რობოტს ან სველის მაशინას ავტომატურად დასრულებული სველი. სურათის მოგება, გადამუშავება და სველის იდენტიფიკაცია შესრულდება სენსორის შიგთავსში, გარე კომპიუტერის გარეშე. ის მაღალი ინტეგრაციას ჰქვს და მცირედ მცირებს სისტემის საერთო ჰარდვერის ხარჯს. ის წამართულია დახრის სინათლესა და გადახრაზე, ინტელექტუალურად იდენტიფიცირებს სველის ხაზებს და მარტივია მűშაობაში. ის აქვს ელეგანტური სტრუქტურა, მოკლე ზომები, მაღალი წვდომა და მრავალფეროვანი ტიპები. ის შეიძლება გაირჩეოს და გამოიყენებოდეს აპლიკაციის სცენარის მიხედვით, ხოლო ყველაზე სასარგებლო პარამეტრები შეიძლება გაინდივიდუალებოდეს.

Სველის ძალა წყარო ტექსტური ს钅ტილი ინდუსტრიალური H ბიმი 6-9 ღერძის სველის რობოტის სამუშაო სადგური ჩინეთიდან
Megmeet CM500 საერთოდ ციფრული, ინდუსტრიული, მძიმე მუშაობის CO2/MAG/MMA ინტელექტუალური სველის მაशინა. იგი გამოიყენება განსხვავებულ კარბონური სპირის სველის პროცესებში: რیლური ტრანსპორტი, ავტომობილი, გემების შესაქმნელად, მეტალურგიული სტრუქტურები, კონტეინერები, მехანიკა, ჰარდვეარი და სხვა ინდუსტრიები, ასევე ინდუსტრიულ მძიმე მუშაობებში და მრავალფეროვან გარემოებში.







