 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Მიწის რეილის ტიპი I ინტელექტუალური სველის რობოტის სტანცია მეტალურგიული სტრუქტურებისთვის

Ტყეური რეილის ტიპის სიდიდის რობოტი აღჭურვილია ინტელექტუალური Friendess ნონ-ტექნიკური სიდიდის სისტემით და დიდი ვიზუალური მანძილის შემოქმედების სისტემით. ის შეიძლება ჩაიტვირთოს 3D მოდელის Tekla, SolidWorks ან UG ფაილები, პირდაპირ მოწოდოს სიდიდის პროცესური პარამეტრები, ავტომატურად იდენტიფიციროს ზუსტი სიდიდის ადგილი და გენერიროს საუკეთესო გარკვეული სიდიდის პროცესი.
Ტყეური რეილის ტიპის მოძრაობის ღერ Gaussian ზრდის ადაპტაბილიტას სიგრძის მიმართულებით. რობოტი შეიძლება დაერთოს ტყეურ რეილთან და ასევე შეიძლება დაერთოს გარკვეული სიდიდის გარეშე ერთდროულად, ხოლო სტანცია შეიძლება მუშაობდეს რეილის ორ მხარეს. ის ძირითადად გამოიყენება H-სვეტის რიბების, სვეტის ბაზების, სვეტის მხარეების, კორბელების და სხვა სტრუქტურების სიდიდის მისამართებლად.
| Რობოტი | 1 კომპლექტ Fanuc რობოტი |
| Ოპციონალური სველის ძალა | Aotai სველის მაशინა და მისი აксესუარები ან Megmeet სველის მაშინა და მისი აქსესუარები |
| Სველის სისტემა | MINYUE სწრაფი პროგრამირების სველის პროგრამული უზრუნველყოფა, MINYUE ლაზრის ვიზუალური სისტემა თრეკინგისთვის. |
| Გამოყენებადი სცენარები | Შესაბამისია გარშის პლატებისთვის, კორბელის ელემენტებისთვის, პატარა სტრუქტურულ ელემენტებისთვის და ა. შეიძლება გამოიყენოს H-ფორმის მთავარ ბიმებში და მეორე ბიმებში მეტალურგიულ სტრუქტურებში, პატარა და საშუალო ზომის პლატების ერთეულებში გარშის მხარეებზე, მოწყობილობების H-ფორმის სტილოებში, მოწყობილობების პლატფორმების ბიმებში და სხვა სტრუქტურებში. |
| Გასასწრები სისტემა | SC220A გასასწრები სისტემა |
| Მიწის რეილის სიგრძე | 6 მეტრი (ოპციონალურია მომხმარებლის მიხედვით) |
Გასასწრები სისტემა
SC220A საბრძოლო სადგუჯე მოწყობილობა არის მოწყობილობა რობოტული საკვების საბრძოლო სადგუჯეების მოხუცებისთვის. იგი გამოიყენება რობოტულ საკვებში, რათა ავტომატურად მოხუცოს საკვების საბრძოლო სადგუჯის ქვაბი, ავტომატურად ჩაჭროს საკვების სამაგრის და დაცვას საკვების საბრძოლო სადგუჯის და კონტაქტული წვერო, გაზრდის საკვების საბრძოლოს მუშაობის პერიოდს და შენახავს ფულს. შემცირებს გამოყენების ხარჯებს, მარტივ ხარისხის მარტივ ხარისხის მარტივ ხარისხის და ამéliს საკვების ეფიკასიას. მარტივი მუშაობა და მარტივი გამოყენება.
Საბრძოლო სადგუჯის სამუშაო სადგუჯის მონაწილეობა: 1. საბრძოლო სადგუჯის გასუფთავების დრო მოკლეა და სისტემის ხელმისაწვდომობა მაღალია. 2. ავტომატურად დასრულებულია საბრძოლო სადგუჯის გასუფთავების პროცესი ხელის მუშაობის გარეშე. 3. გაუმჯობესებს ხარისხის პრობლემების გამოწვევას საკვების გარეშე. 4. მოწყობილობა გამოყენებულია რობოტის TCP კალიბრირების იгლით.
Რობოტული საკვების პროგრამული უზრუნველყოფა
Პროგრამული უზრუნველყოფა შეძლებს ავტომატურად გამოაქვს კავშირებს ხატულებიდან, რომლებიც არ მiliki კავშირის ნიშნულებს, რათა შეამციროს ხელითი მონაწილეობის მუშაობა. მაღალ მუშაობის 3D ენგინისა და რობოტის კონტროლერის გამოყენებით, ავტომატურად შექმნილი წერტილები მოIMITINGდება და ვერიფიცირება, რათა გაუმჯობესოს ნამდვილ მუშაობაში შესაძლო კოლიზიები.
Და არაა ხატულის ტიპი, 3D სკანირება შებრუნებით მოდელირება, სწრაფი 3D ხატულების გენერირება, რობოტის კავშირის ტრაექტორიის ავტომატური გენერირება, კავშირის ტრაექტორიის ოპტიმიზაცია, მდგომარეობის ვიზუალიზაცია, კავშირის ჩარბის კოლიზიის ავტომატური გამო探ვება.
LDWP-305 ლაზერული ტრეკერი
LDWP-305 არის ინტელექტუალური ხაზოვანი სკანირების სენსორი სველის გამოყენებით. ის მიიღებს სველის სექციის კონტურულ ინფორმაციას ხაზოვანი ლაზრის სკანირებით, რომელიც საშუალებას ძალებს რობოტს ან სველის მაशინას ავტომატურად დასრულებული სველი. სურათის მოგება, გადამუშავება და სველის იდენტიფიკაცია შესრულდება სენსორის შიგთავსში, გარე კომპიუტერის გარეშე. ის აქვს მაღალი ინტეგრაცია და მniejsებს სისტემის საერთო ჰარდვერის ღირებულებას. მას აქვს წინააღმდეგობა არკის სითთოსა და გადახრას, ინტელექტუალურად იდენტიფიცირებს სველის ხაზებს და ადვილად მუშაობს. ის აქვს ელეგანტური სტრუქტურა, მოკლე ზომები, მაღალი წვდომა და მრავალფეროვანი ტიპები. ის შეიძლება გაირჩეოს და გამოიყენებოდეს აპლიკაციის სცენარის მიხედვით, ხოლო ყველაზე სასარგებლო პარამეტრები შეიძლება გაინდივიდუალებოდეს.

Უპირატესობა
1. მხარდაჭერს არა-ინსტრუქციურ რეჟიმს განსხვავებული პროდუქტებისთვის, როგორიცაა სანდვიჩ პანელები, ტრასის ბილი, ბრაჭები, ხიდის განყოფილებები და პანელების მდებარეობები;
2. დიზაინის ეტაპზე არ არის საჭირო ველდების მონიშვნა, და თარგეტირებული ველდის პოზიცია ავტომატურად გამოიღება 3D ხატულების იმპორტის შემდეგ;
3. ადამიანის შემოწმება არ საჭიროა, რობოტი ავტომატურად დასრულებს მოქმედებებს, როგორიცაა ნულოზე დაბრუნება, გადასვლა, პოზიციის ძებნა, ველდი, ჩათვლა და მარკის გასუფთავება;
4. არ არის საჭირო განათლება დარბაზში, პროგრამა შეიძლება იქონდეს გენერირებული ნებისმიერ დროს და ადგილზე, და შეიძლება გაიგზავნოს რობოტს მასში შეყვანის მიხედვით მითითებულ დროში;
5. თვითმოქმედ პროგრამირება, 1:1 რობოტის მოძრაობების სიმულაცია, წინასწარ არასარგებლობის და კოლიზიის არასარგებლობის გარეშე;
6. ციფრული ტვინ ტექნოლოგია შეძლებს რობოტის ტრაექტორიის, ველდის ვოლტაჟის, ტოკის, სიჩქარის და სხვა პროდუქციის ინფორმაციის ნახვა რეალურ დროში.
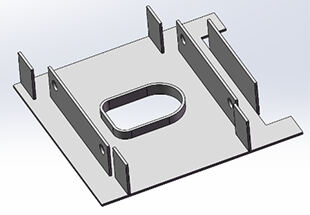
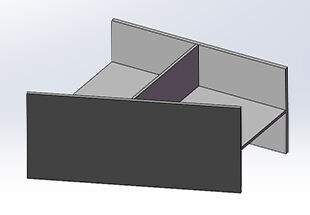
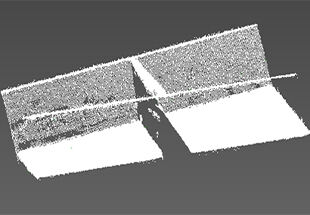
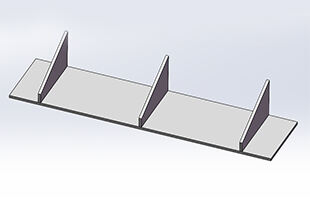
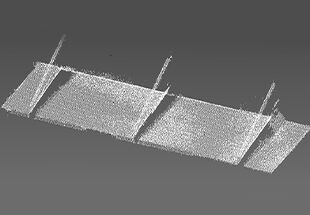
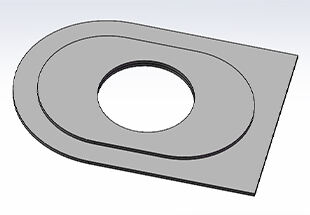
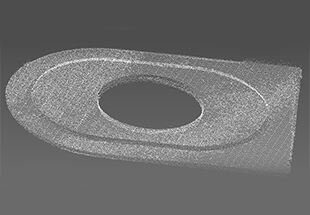
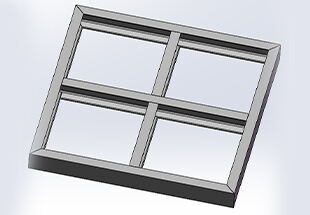
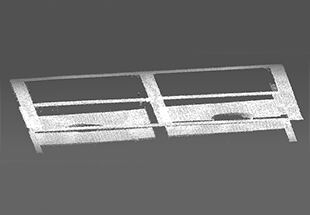
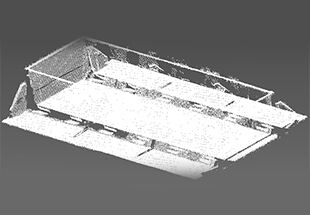
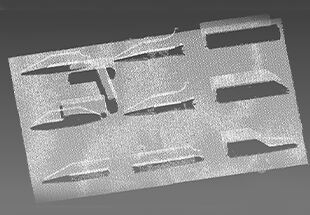
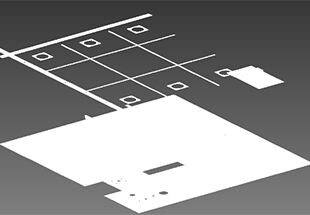
| Არა | Ნამუშევრის ტიპი | Ნამუშევრის მოდელის სურათი | Ნამუშევრის პუნქტური სურათი |
| 1 | H ბიამი (შემორჩენით ველდებით) | 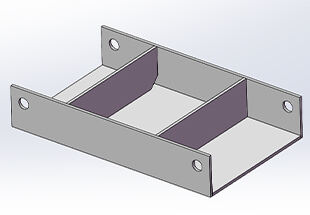 |
 |
| 2 | Თაბლო ელემენტი |
 |
 |
| 3 | Სირკონის კორბელი |
 |
 |
| 4 | Გახურეთი |
 |
 |
| 5 | Პურლინის მდგომარეობის პლატი |
 |
 |
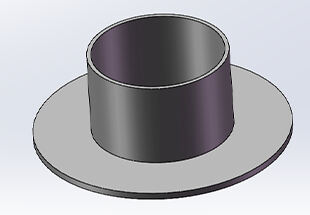
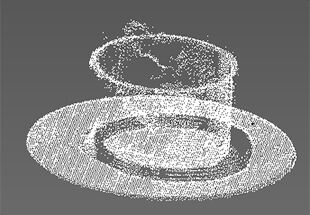
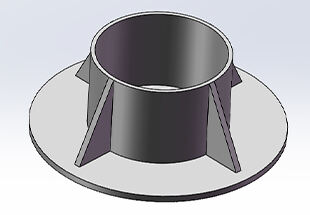
| 6 | Გარული ტუბის ფუძე |
 |
 |
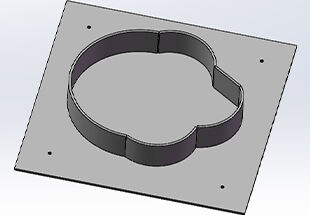
| 7 | Ჯვარსის ფორმის წირილა ტუბის ფუძე |
 |
 |
| 8 | Გარე ზედაპირი |
 |
 |
| 9 | Ორსაფეხური დაფა |
 |
 |
| 10 | Ქანალური ბირთვის შესადგენი |
 |
 |
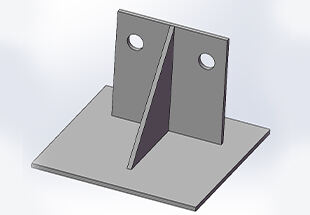
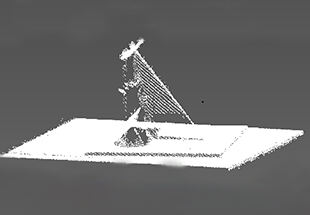
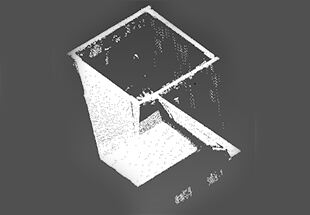
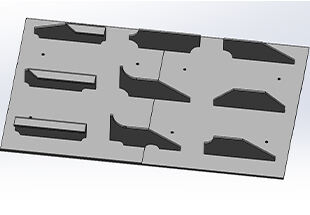
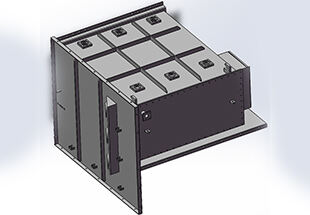
| 11 | Ორმაგ სველი კავშირი | 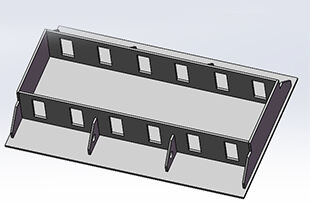 |
 |
| 12 | Ყუთის გირდა |
 |
 |
| 13 | Არაწესრიგოვანი გამრუდება და საკუთარშინაერო დაკავშირება |
 |
 |
| 14 | Ტრანსფორმატორის ცხელი |
 |
 |





