EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Პროგრამის გარეშე ინტელექტუალური რობოტული სველის სტანცია
“Beijing Minyue Technology Co.,Ltd ”Როგორც ჩინეთის მובילი სამეცნიერო კომპანია არა- ინსტრუქციონი ინტელექტუალური რობოტების მართვა . კონცენტრირებულია ფლექსიბლურ მართვაზე თავის დამუშავებით RobotSmart-ინტელექტუალური გადაწყვეტილების სისტემა, SmartVision- ბინოკულარული სტრუქტურული სინათლის ვიზუალური სისტემა, SmartEye - LASER გამოსახულების სისტემა, რომელიც გთავაზობთ ახალ გენერაციის ინტელექტუალურ რობოტული არასწორი ვარჯიშისა და ჭრის ამოხსნებს.
Our კომპანია მაღალი საგნობრივი R&D გუნდი განათლებულია გრაფიკებისა და ავტომატიზაციის სფეროებისგან, მათგან 90%-ზე მეტი მაღალი საგნობრივი ხარისხი აქვს.
Სპეციალიზირებული რობოტული კონტროლზე, ალგორითმებზე და ადამიან-რობოტ ინტერაქციაზე, ჩვენ ვწვდით უფრო კარგი ინტელექტუალური ამოხსნების შესაძლებლობისათვის გლობალურ მაღაზიის ინდუსტრიაში.
Მომხმარებელმა 3D ნამუშევარის მოდელი იმპორტაცია შესახებ RobotSmart- ინტელექტუალურ დეციზიურ სისტემაში, პროგრამული უზრუნველყოფა შეიძლება სწრაფად და ავტომატურად შექმნას ინდუსტრიული რობოტის მოძრაობის კოდი და ერთად შეიძლება ასევე აღწეროს რობოტის მოძრაობის სიმულაცია, კოლიზიის გამოკვლევა, მაგალითის გარეშე ტრაექტორიის გეგმა, ერთობლივობის გამოსავალი და ღერ Gaussian ზღვარის გამოკვლევა და სხვა ფუნქციები, რათა არ გადაეცემა تقليსიური სირთული და ავადმყოფი ხელით სწრაფი პროგრამირების პროცესი.
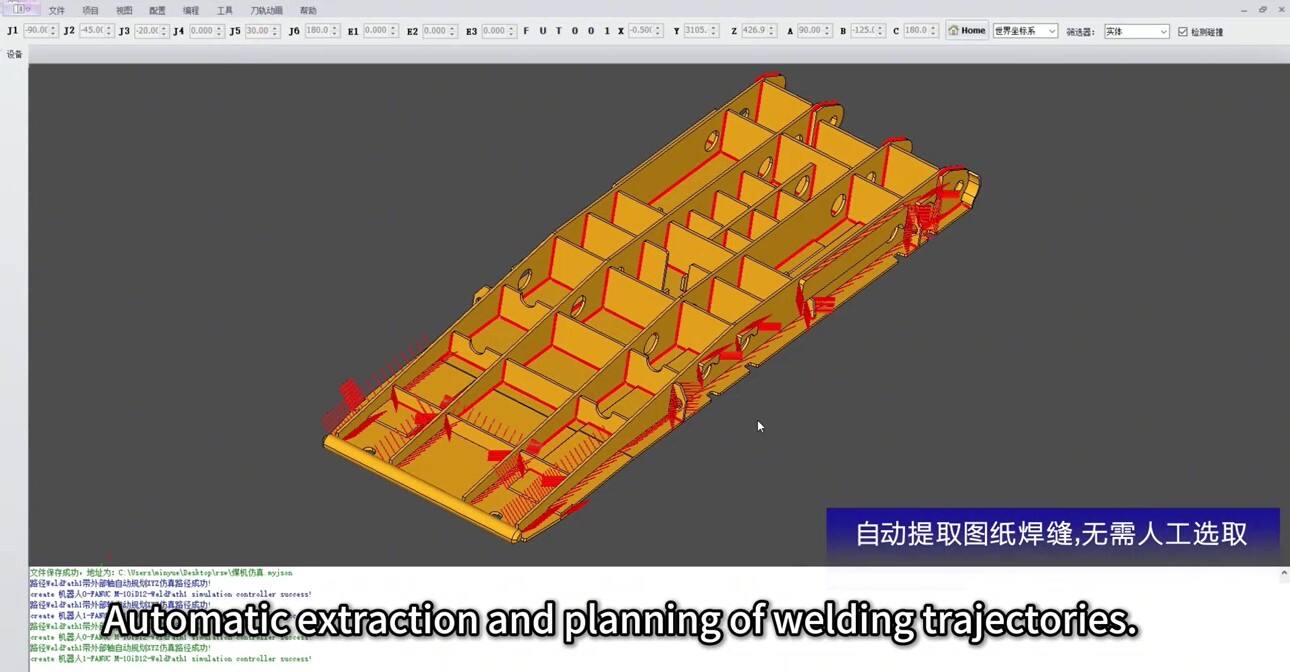
Მოძრაობა ახალ მიმართულებისკენ, ინდუსტრიის პრობლემების ამოხსნა.
Კოალის მაღაზიის ჰიდროავტომატიკა მხარს უჭერს სველის პრობლემები, რომლებიც გავლენა ინდუსტრიულ განახლებაზე
Ჰიდრაულური მხარდაჭერის ძირითადი სტრუქტურული ნაწილების წონა, რომლებიც ჩვეულებრივ გამოიყენება კოლის მехანიზაციის ინდუსტრიაში, შეიძლება აღემატებოდეს 20 ტონას. მთელი მათგანი არის საფუძველი სტრუქტურული ნაწილები, რომლებიც შუა-სიმსუბი პლატებისგან არის დასავრცელებელი. ეს არის ჰიდრაულური მხარდაჭერის ძირითადი ნაწილი, რომელიც გამართული ტონებისა და შოქების გამომწვევას უზრუნველყოფს. ჰიდრაულური მხარდაჭერები მთავარად მოიცავს მოკლე, სამგანზომილებიან კვერდი სველებს.
Მეტი 1000 სველი . და მთელი მათგანი შეიძლება იყოს შუა-სიმსუბი პლატების მრავალსაფეხური მრავალგამომავალი სველი. სველის ხაზი სიმკვრივია, სველის წვდომა ცუდია, და მისი სველის ხარისხი პრეციზიურად გავლენას ახდენს მუშაობის ზონის უსაფრთხო წარმოებაზე.
Მისი სტრუქტურის სპეციფიკა და პროცესის სირთულეთი, ხელით სველი არ გარანტირებს სველის სტაბილობას და სველის ხარისხის ერთნაირობას.
Გამოყენება ჩვეულებრივ რობოტულ სველი.
- Ინსტრუქციონი პროგრამირება, r მოითხოვს მუშაობის შეჩერებას და დაბალ რობოტის გამოყენება.
- Სტრუქტურა სირთულიანია, გარემოები შეიცავს გარემოებს განსხვავებულ ზომებში, და მეტი 1000 სველით გჭირდებათ 5 დღე ასაკეთებლად ისწავლენ პროგრამირებენ ხელით.
- Მუშაობის პოზიციონირებისა და ერთმანეტობის ზუსტება არ შეესაბამება მოთხოვნებს, და კონცენტრირებული სველის თერმიული დეფორმაცია გამოწვევს სველის გადახრას.
- Ძალიან რთულია რობოტის სველის ავტომატიზაციის განხორციელება მთლიან ჰიდროულიკური მხარს უჭერს სტრუქტურული ნაწილები.
Კომპანია, რომელიც არის მიმდინარე კომპანია კოალიტის მაशინების ინდუსტრიაში, მიიღო Minyue Technology-ის ერთ ღილაკით გაშვების, არა-ისწავლებელი ინტელექტუალური სველის ამოხსნის გამოყენება.
Ეტაპი 1: ჩვენი მომხმარებელი იმპორტირებს 3D მუშაობის მოდელს RobotSmart - ინტელექტუალურ გადაწყვეტილების სისტემაში.
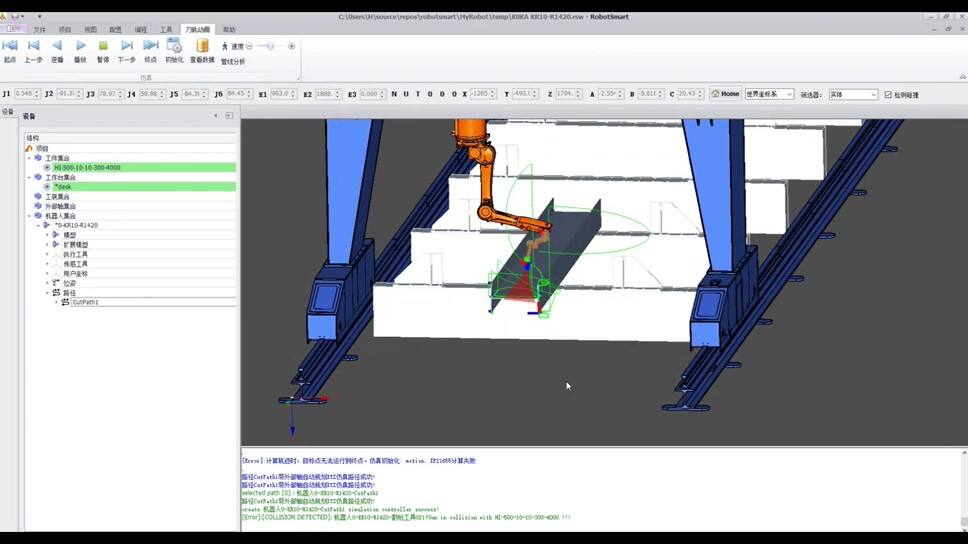
RobotSmart-ინტელექტუალური გადაწყვეტილების სისტემა, რომელიც შესაძლებელია სწრაფად და ავტომატურად შექმნას ინდუსტრიული რობოტის ტრაექტორია და ერთად ასრულებს რობოტის სიმულაციას, კოლიზიის გამო探ვებას, ერთობლივობის გამოსავალებს და ღერძის ზღვარის გამო探ვებას.
Ნაბიჯი 3: SmartVision-3D სტრუქტურული სვეტის ბინოკულარული ვიზუალური სისტემა ხდის ნაწილაკის გრანტირებულ პოზიციონირებას. 3D ბინოკულარული სტრუქტურული სვეტის ვიზუალური სისტემა სკანირებს ნაწილაკის ზედაპირობას და შესრულებს პუნქტური მონაცემთაგან შებრუნებულ მოდელირებას. ნაწილაკის ზედაპირობის მახასიათებლები აღარაფერის მოდელირების სიზGI ში ± 5 მმ. გამოკვლის სიზუსტე 40 მმ-ში ნაწილაკის შესადგენად და ინიციალურ პოზიციონირებას ,Განიხილეთ შესადგენის კუთხე 10 °。 Განიხილეთ სველის სიგრძის ცვლილებები 30 მმ-ში (ჩასამართლელი) 。
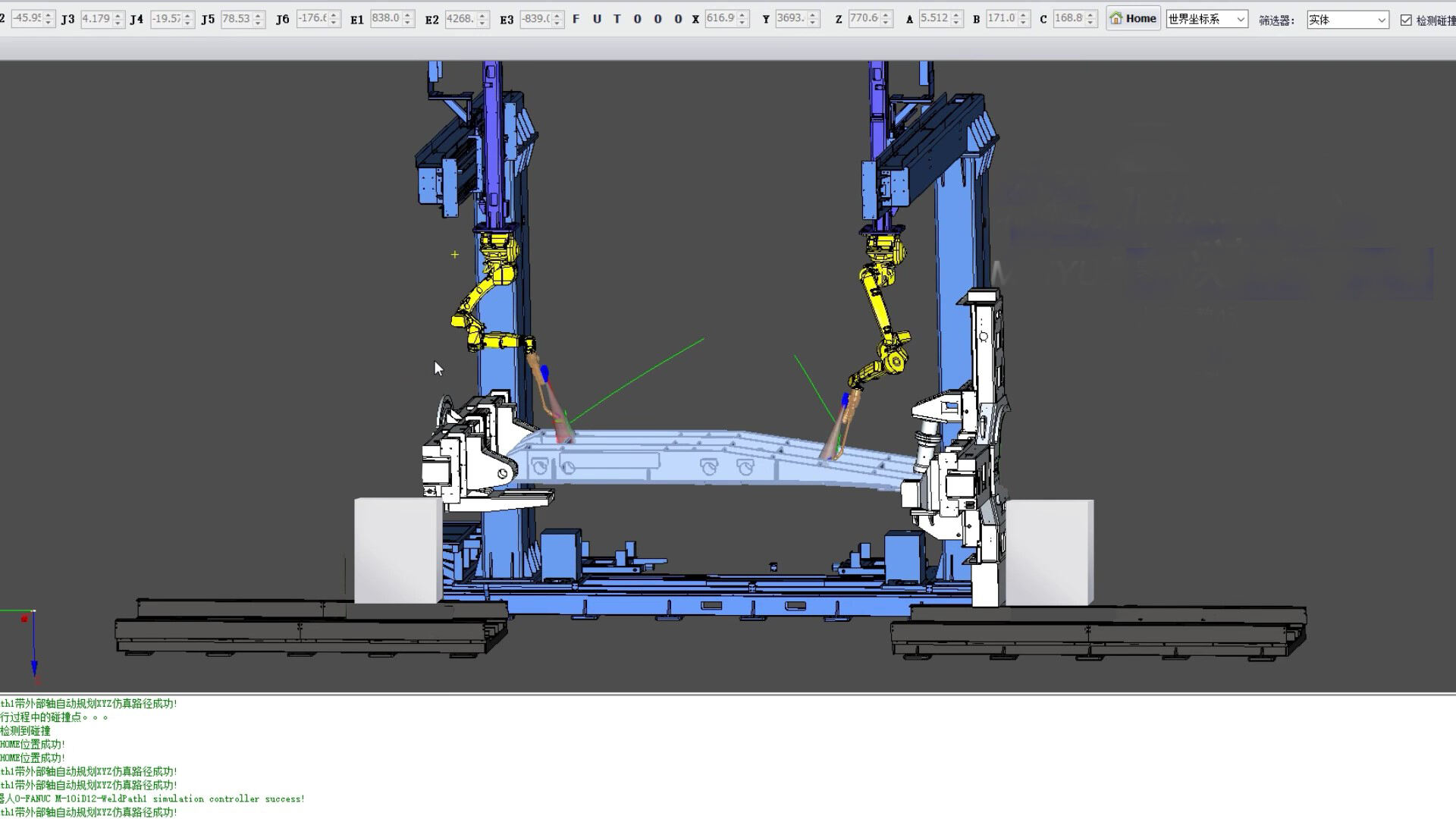
Ნაბიჯი 4: SmartEye - ლაზრული ვიზუალური სისტემა სველის სიყვარულის სკანირებით, დადასტურებს სველის სიყვარულის ადგილმდებარეობა და ინფორმაცია, მართვის 3D ციფრული მოდელი და ნაწილაკის სველის ადგილმდებარეობა, მიიღეთ ნაწილაკის სველის ადგილმდებარეობის მონაცემები. მხარდაჭერს მრავალ რობოტს, მრავალ გარე ღერ Gaussian და პოზიციონირებელი სამუშაო ერთმანეთთან.
SmartVision-3D ბინოკულარული სტრუქტურული სვეტის ვიზუალური სისტემა იმპორტირებს 3D მოდელების ხატულას ,Მიღებული 3D პუნქტური მონაცემების შედარება 3D ციფრული მოდელთან ,Რობოტი ამუშავებს მხოლოდ 3D წერტილების ღერ Gaussian მონაცემთა გამოყენებით. როდესაც სენსორის მიერ მიღებული წერტილების ღერძი მონაცემები ემთხვევა 3D მოდელს, შესაბამისად ახალ კომპონენტების მიერ განახლების შემდეგ, განახლებული კომპონენტები ამუშავებულია.
Მართლაც არეალიზებულია ერთ ღილაკით წყაროს ჩართვა, 2 წუთში არეალიზებს არკის ჩართვას, სწრაფი, ზუსტი, მთლიანად პროგრამირების გარეშე, მაღალი ეფექტიურობა და მაღალი ზუსტება.
Ტექნოლოგიურად მიმღები, ინდუსტრიულად ყურადღება.