私たちは皆、ロボットと作業するのは難しいことがあると知っていますが、正しい情報と練習があれば非常に簡単になることができます。MINYUEは、ロボットの取り扱いについてあなたを教育し、可能な限り最良の方法でサポートします。このガイドでは、どのように操作するかについて説明します。 ロボットハンドリングシステム また、その動きをどう制御し、安全かつ効率的に作業を行うかについても説明します。
まず、さまざまな種類のロボットについて説明します。知っておくべき2つの主要なタイプのロボットがあります:固定型ロボットと移動型ロボットです。固定型ロボットとは、全く動かないロボットのことです。これらは工場で部品を組み立てるなどの作業に一般的に使用されます。一方で、移動型ロボットは環境をナビゲートし、移動するように設計されています。これらのロボットは通常、配達や清掃目的で使用される移動式のロボットです。これらの種類の違いを理解することは、適切なロボットを選んで、行うべき仕事に合ったものを選択するために重要です。
では、MINYUEロボットの操作について説明します。ロボットを動かすための基本的なインターフェースは、ジョイスティックまたは四方への移動を制御する一連のボタンです。コントロールに慣れるためには練習が重要です。ロボットは、コードと呼ばれる命令の断片を書き込むことでプログラムできます。このコードは、ロボットにどのように動くか、どのタスクを遂行するかを指示します。ロボットを完全に使いこなすためには、プログラミングをマスターすることが現在の核心的なスキルです。
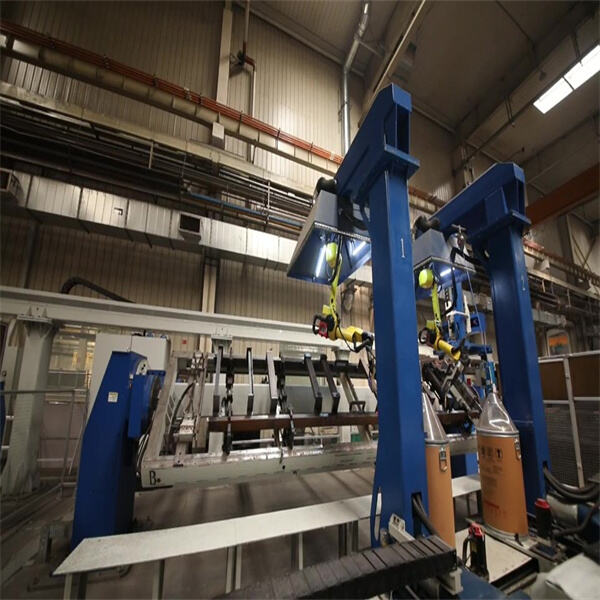
ロボットが複雑な動きをする必要がある場合もありますし、これがより複雑になることがあります。いくつかのことは非常に複雑なので、私たちが管理可能な部分に分割しようとします。例えば、部屋の一方から他方へロボットを移動させたいとしましょう。まず、ロボットを正しい方向に向けるために向きを変えなければならないかもしれません。その後、少し前に進めてから、目的地に到達するために回転させる必要があります。これがMINYUEです。 自動化された素材搬送ロボット ロボットを簡単に操作できます。また、センサーを使用することもでき、これによりロボットは環境を理解することができます。センサーはロボットが障害物を回避し、よりスムーズにナビゲートするのに役立ち、ハンドラーとしてのあなたの作業を楽にします。

ロボット操作が得意でない時間を費やすのは無駄な時間です。そして、訓練するほどロボットに慣れ、操作する際の自信が増していきます。また、ロボットのプログラミングを微調整することでスキルを磨くこともできます。あなたが書いたコードに対して小さな調整を行い、ロボットの動きをよりスムーズにし、効率的に動作させることができます。定期的な練習と必要なときに変更を行うことで、ロボットの操作能力が ロボットアーム溶接機 大幅に向上します。

ロボットと対峙する際、安全性は最優先事項の一つです。自分自身や他者の安全を確保するために、必ず安全規則や手順に従ってください。ロボットと作業しているときには、周囲に注意を払うべきです。なぜなら、彼らは時々警告なしに動くことがあります。作業効率を高めるために、適切なロボットが必要な仕事を行っていることを確認してください。例えば、重い物体を移動させる必要がある場合、重い荷物を持ち上げたり運んだりするために設計されたロボットを使用すべきです。さらに、センサーや自動化技術を使えば、より短時間で少ないエネルギーで多くのことが達成できます。自動化はあなたの代わりに一部の作業を行い、時間を節約し、仕事が楽になります。
高速、正確、完全にプログラミング不要、高効率かつ高精度です。伝統的なロボットの複雑な教育プロセスを解決し、教育によるダウンタイムを削減します。
北京民悦科技有限公司は、産業用ロボットの非教育的な知能応用における世界をリードするハイテク企業です。自社開発の RobotSmart - インテリジェント意思決定システム、SmartVision - 二眼構造光ビジョンシステム、および SmartEye - レーザービジョン溶接追跡システムを使用して、柔軟な智能制造に特化しています。次世代の知能型ロボット溶接・切断ソリューションを提供します。
強力な溶接ロボットを提供し、前面搭載、側面搭載、逆さ搭載、ガantry設置、複数ロボット用のインテリジェントな軌道計画、複数の外部軸、そして協働作業用のポジショナーをサポートします。ロボット動作シミュレーション、衝突検出、特異点回避、軸制限検出を実現します。
検出と追跡機能を採用し、溶接継ぎ目をスキャンしてその位置や情報を確認し、3Dデジタルモデル図と実際の部品間の溶接位置を補正し、材料の誤差や熱変形によるずれ溶接の問題を解決します。
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









