Ինչ են 悍接 ռոբոտները? | Երկարության սիլինդր | - YouTubeԻնչ են 悍接 ռոբոտները? | Երկարության սիլինդր | YouTube Նրանք ստեղծված են անձանց միայն կարող անելու բաները արագ և լավ անելու համար։ Կա շատ գործընկերություններ, որոնք արտադրում են այս ռոբոտները գեղարվեստության ոլորտում, մեկ անուն ստորոգում է այլ անուններից՝ այդ անունը է MINYUE։ Նրանց 悍接 ռոբոտները ժամանակակից են և փոխում են և դարձնում են լավագույնը և ավելի գեղարվեստ։ ռոբոտական կետային համեմատում գործնախարարություն
MINYUE համերգրունդային ռոբոտները թողնում են գործ UsersController-ները աշխատել նոր ձևով։ Այս ռոբոտները կառուցված են լինելու համար արագ և ճշգրիտ։ Սա նշանակում է, որ ընկերությունները կարող են ավելի շատ արտադրանքներ ստեղծել պակաս ժամանակում։ Սա լավ լուր է գործընկերության համար։ Երբ նրանք կարող են ավելի շատ բաներ ստեղծել արագ, նրանք կարող են ավելի շատ փոխարենել և expended։ Գործընկերությունները առաջարկում են ավելի շատ արտադրանքներ և ներմուծում են ավելի շատ գումարներ, ինչպես նաև հասանելի են այն, ինչ մարդիկ ցանկանում են, շատ հաջող։
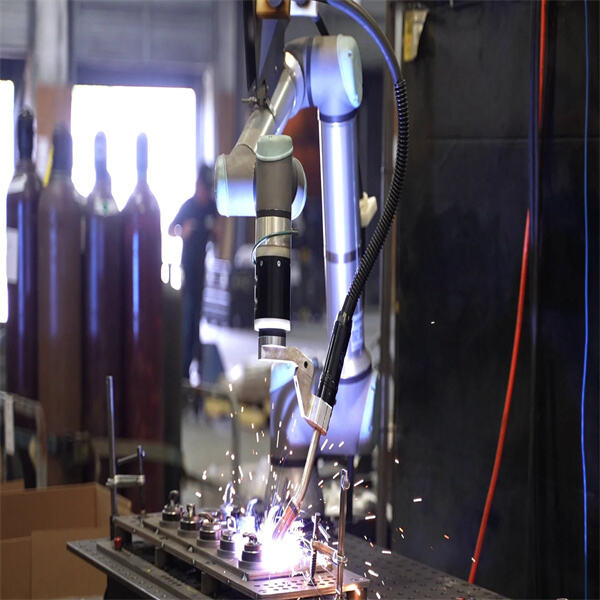
Գործակալությունների մեջ, ռոբոտները հերթագրում են մեր կերպը ռոբոտային համագործակցության ցել այսօր կատարվում է: Առաջին ժամանակներում ձեռքով հաղորդումը կարողացավ միակ տարբերակն լինել, և դա շատ ժամանակատար և աշխատանքային էր: Բայց այժմ այս հանգեցնող ռոբոտային սարքերը կարող են կատարել աշխատանքը շատ արագ և լավ, քան մարդկանց: Ռոբոտները նաև ավելի ապահով են, քանի որ կարող են գործանել տարածություններում, որոնց մեջ մարդիկ կարող են ունենալ տարանդրական ազդեցություն: Նրանք նաև կարող են վերցնել ջերմ նյութեր և գործանել փոքր տարածություններում: Եվ MINYUE-ն գտնվում է այս հետաքրքիր փոփոխության առաջնում, կառուցելով սահմանափակ տեխնոլոգիա, որը հաղորդումն ամբողջությամբ ⾰ուցվում է:
Գրավիչ աճ է գրավում ռոբոտական վարձագործման արագույթ արդյունաբերության եւ ընկերությունների համար անհրաժեշտ է արագ հարմարվել առաջընթացին: Ահա թե որտեղ է MINYUE- ն ներգրավված: Այդ պատճառով նրանք անընդհատ ձգտում են արտադրել նոր եւ ավելի լավ լվացքի ռոբոտներ, որոնք կհամապատասխանեն տարբեր արդյունաբերությունների պահանջներին: Նրանց ռոբոտները բազմակողմանի են եւ կիրառելի են տարբեր գործերի համար, ինչը նրանց աներեւակայելիորեն օգտակար է դարձնում ցանկացած ձեռնարկության համար, որը պահանջում է լվացում: Մինչեւ մեքենաների, MINYUE-ն կարող է ստեղծել ցանկացած տեսակի տվյալներ:

Վերադարձ դեպի խելացի լվացքի ռոբոտներ, որոնք փոխում են արտադրության խաղը: Ընկերությունները կարող են պարզեցնել իրենց լվացքի գործընթացը, շնորհիվ MINYUE-ի ֆանտաստիկ մեքենաների: Այս կերպ, այն նվազեցնում է սխալները եւ պահում է բոլոր գործընթացները հարդարման: Ռոբոտները, որոնք սովորում են իրենց միջավայրից, կարող են օգտագործվել տարբեր նյութերի եւ առումներով: Նրանց բազմակողմանիությունը նաեւ նրանց դարձնում է առավելություն արտադրական տարբեր աշխատանքներում: Նրանք կարող են աշխատել մետաղների, պլաստմասերի եւ այլ նյութերի հետ, ինչը նրանց դարձնում է շատ օգտակար շատ արդյունաբերություններում:

MINYUE մասնավորապես կենտրոնացված է գեղարվեստ 悍接 ռոբոտների ստեղծման վրա, որոնք ունեն բարձր ճշգրտություն։ Մեքենաները դիզայնված են գեղարվեստ ոլորտի արտադրանքներ ստեղծելու համար։ Սա կարևոր է usahaan-ների համար, որոնք պետք է արտադրեն բարդ մասնիկներ կամ պետք է լինեն սխալացուցիչ։ Գեղարվեստությունը այն է, որ արտադրանքները դurable են և ֆունկցիոնալ։ Նրանք ասում են, որ նրանք երբեք չեն կանգնում՝ նոր տեխնիկաներ սովորելու համար։ Այսպիսով, MINYUE-ի ռոբոտները 항jours են գեղարվեստության ոլորտում։ Այս ինտելեկտուալ մեքենաները ենթարկված են գեղարվեստության մասին ավելի 敞l ապագան։
Արագ, ճշգրիտ, լինելով անծրագրային, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ։ Դա լուծում է pä դարձնում է ավելի հեշտ այն բարդ ուսուցման գործընթացը, որը հանդիսանում է تقليստական ռոբոտների համար, ավելացնելով ուսուցման գործընթացի կանգ ժամանակը։
Beijing Minyue Technology Co.,LTD, որը համարվում է աշխարհի նախկին գեղատեսական տехնոլոգիայի կազմակերպությունը՝ արդյոք ինդուստրիալ ռոբոտների ոչ տարածաշրջանային ինտելեկտուալ կիրառման ոլորտում։ Մենք մասնագետ ենք առանց ծրագրավորման սեփական ինտելեկտուալ UFACTURING-ի վրա, օգտագործելով մեր սեփական արտադրած RobotSmart - Ինտելեկտուալ 抉cision Making System, SmartVision - Binocular Structured Light Vision System և SmartEye - Laser Vision Seam Tracking System։ Առաջարկում ենք նոր գերասենյակային ինտելեկտուալ ռոբոտային համեմատում և ստիրում լուծումներ։
Առաջարկում է հզոր վիճակագրական ռոբոտ, որը ենթադրում է առաջի բեռնում, կողմից բեռնում, փոխադարձ բեռնում, գանտրի մուտք, բանավեճ տրայեկտորիայի պլանավորում մի քանի ռոբոտների համար, մի քանի արտաքին առանցքների և դիրքաշրջի համատեղումների: Հասնում է ռոբոտի շարժման միմաստիկական մոդելավորման, հարթադիրքի հայտնաբերում, միակության հանգումից խուսափումին և առանցքի սահմանների հայտնաբերում։
Օգտագործում է գտնելու և հետևելու ֆունկցիան, սկանավորելով վիճbum հատվածը, հաստատելով վիճbum հատվածի դիրքը և տեղեկատվությունը, որպեսզի حيحուղանակենք վիճbum դիրքը միջև 3D թվային մոդելային գծագրում և իրական աշխատանքային մասին, լուծելով վիճbum սխալների պատճառով մուտքային նյութերի սխալների և ջերմային դեֆորմացիայի պատճառով։
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK




