 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Tanítás nélküli Acélszerkezetű Gantry Intelligens Üvöltőrobot

Acélszerkezetű Gantry Üzemeltetési Robot
Ez a berendezés egy speciális üzemeltetési robot az acélszerkezetek számára, amely az acélszerkezeti gyárak automatizált termelésére alkotott.
Ez a berendezés egy speciális üzemeltetési robot az acélszerkezetek számára, amely az acélszerkezeti gyárak automatizált termelésére alkotott.
1. A berendezés főként az alábbi részekből áll: vezetékrészek, gantry részek, robot-igazító részek, villamos irányítódozsa részek, üzemeltetési tápegység részek, stb.
2. A gerendaprofil komponensei főként egy hajtós zárkeretből, áthuzott vízszintes tartókból és egy beállítható keretből állnak. A hajtós áthuzott vízszintes tartó, az áthuzott vízszintes tartók és a beállítható keret mind doboztartományos varrazási szerkezetet alkalmaznak, és varrás után tömegfeszültségre alapozó kezelést menetelnek. A szerkezet kompakt, és a kinézet szép.
3. A teljes gép aktív hajtós áthuzott vízszintes tartója japán Panasonic AC szervo-vezérlésű és motorral rendelkező hajtóval, valamint japán SHIMPO csökkentővel van ellátva, majd fogaskerék és fogaskerékvessző által történik a továbbítás. A hajtós áthuzott vízszintes tartó oldalán vízszintes irányítási gömböt telepítenek. Az irányítási gömböt az excentrikus tengelyének beállításával nyomhatják a vezérlővízszintes sávra, így biztosítva a teljes gép működésének stabilitását és pontosságát.
4. A kocsi csúsztatóvízszintei minden 38KG/M-ből készülnek. A csúsztatóvízszintek külső oldalaira pontossági feldolgozású fogaskerek rendelkezik. A fogaskerék 45 acélból készül, módulusa 2.0. Kétoldalas hajtót használ. A csúsztatóvízszintek nyomáscsavával és hátterű lapokkal rögzítve vannak. Ez az elrendezés biztosítani tudja a két csúsztatóvízszint fontos technikai paramétereit, mint például a hosszirányú egyenesesség és párhuzamosság.
A nem oktatási intelligens összefonó támogatás specifikusan osztozva van Rajz típusú 3D rajz importálása, Fonóvonal automatikus kinyerése, robot összefonó trajektória automatikus generálása, helyzet vizualizációja, fonófej ütközés automatikus érzékelése.
Robot összefonó trajektória automatikus generálása, helyzet vizualizációja, fonótrajectória optimalizálása, fonófej ütközés automatikus érzékelése.
Rajz típus nélkül, 3D skennel visszafordított modellezés, gyors generálás 3D rajzokra, robotos vízszintes pályagenerálás, vízszintes pálya optimalizálása, viselkedés vizualizációja, automatikus vízszintes lógó ütközés érzékelése.
Paraméter
| A munkaanyag maximális hossza | 11m |
| Karima szélessége | 2,5m |
| Kerékpár mozdulási sín szabály | 2800 mm |
| Kerékpár mozduláti motor teljesítmény | 2x0.75 kW |
| Kerékpár mozdulási vasvágási sebesség | 100-1000 mm/min |
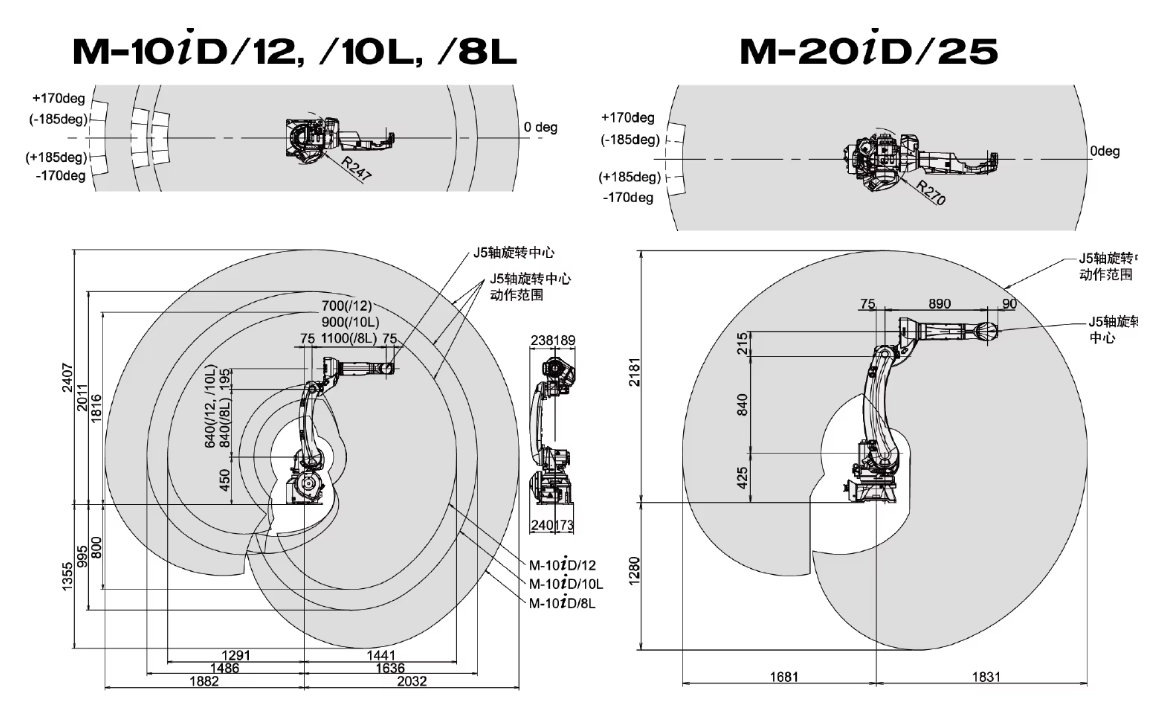
Ösztönző robot
A Japánban gyártott FANUC vasvágó robotot használjuk. A konkrét robot paraméterek az alábbiak.
LDWEP-500 laser követő
Az LDWEP-500 egy intelligens vonalvásárló villamos csatlakozási érzékelő. Vonalásos laser-felderítés segítségével szerez be kontúrinformációkat a villamoscsatorna keresztmetszetéről, és irányítja a robottal vagy villamosgéppel való automatikus villamossal. Az képfeldolgozás, az elemzés és a villamoscsatorna azonosítása az érzékelő belsejében történik, nem igényel külső számítógépet. Nagy integrációs fokkal rendelkezik, és csökkenti a rendszer általános hardveres költségeit. Arcsvilágosságra és szórásra van rá akadályozva, intelligens villamoscsatornák felismerésére alkalmas, és könnyen használható. Finom szerkezetű, kompakt méretű, jól elérhető, és gazdag változatossal rendelkezik. Alkalmazási helyzet alapján választható és a legmegfelelőbb paraméterek testreszabhatók.

Villamosforráskénti Acélos Szerkezetes Ipari H Balta 6-9 Tengelyes Villamos Robotállomás Kína
A Megmeet CM500 használata: egy teljesen digitális, ipari nehézterhelésű CO2/MAG/MMA okos összavarógép. Széleskörben alkalmazott különböző vállalati acél feldolgozás területein: villamosvezeték, autóipar, hajóépítés, acélkonstrukció, tároló, gépgyártás, fémipari ágazatokban, valamint az ipari nehéz terhelés és a kemény környezeti feltételek között.







