EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Nincs program – intelligens robottörmelési állomás
“Beijing Minyue Technology Co., Ltd ”Mivel Kína vezető magas technológiai vállalata a(z) nem- oktatásában intelligenciájú ipari robotok területén . Összpontosít a flexibilis gyártásra saját fejlesztésű RobotSmart-intelligens döntéshozzási rendszerrel, SmartVision-két szemű strukturált fénylátórendszerrel, valamint SmartEye-lézeres csatlakozásvonal követő rendszerrel. Új generációs intelligens robot nem oktatott összefonó és vágó megoldásokat kínál.
Mi a cégnek mester- és doktortitulusú, valamint grafikai és automatizálási területek szakértőiből álló diszciplínák általános Kutatási és Fejlesztési csapata van. Több mint 90%-uknak van mesterfokozatuk vagy ennél magasabb.
A robotvezérlés, algoritmusok és ember-robot kapcsolat területén specializálva, elkötelezettek vagyunk arra, hogy jobb robotika intelligens megoldásokat nyújtunk a globális gyártási iparnak.
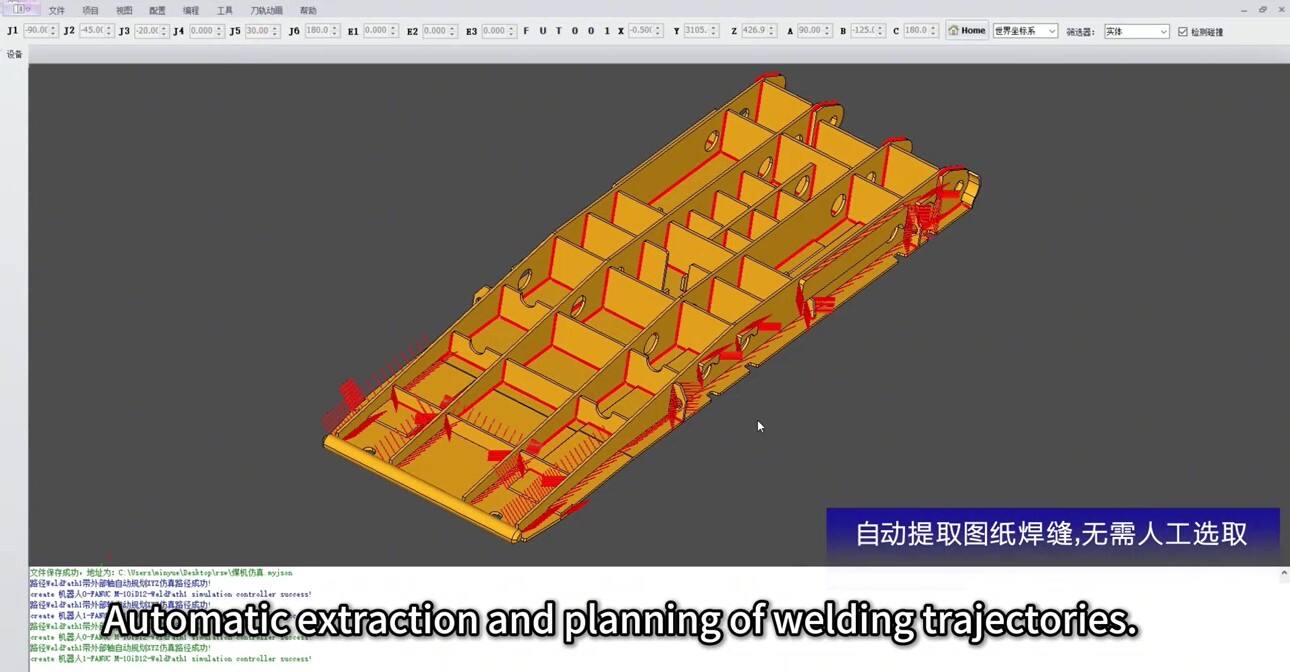
Amikor a felhasználó beimportálja a 3D munkafeldolgozó modellt a RobotSmart - intelligens döntésszámítási rendszerbe, a szoftver gyorsan és automatikusan generálhat ipari robotmozgáskódot, egyszerre pedig a robotmozgás szimulációját, ütközésérzékelést, akadálykeresztüli pályatervezést, egyenlőtlenség elkerülését és tengelykorlát-érzékelést valósít meg, így elkerülve a hagyományos bonyolult és hatéinélküli kézi tanítási programozási folyamatot.
Új irányba tartva, az ipar fájdalmas pontjainak megoldására törekvünk.
Kohász-ipar hídroszisztémák támogatások vashúzást érintő problémák, amelyek befolyásolják az ipari fejlesztést
A kohász-iparban gyakran használt hidrohordozók fő szerkezeti részeinek súlya 20 tonnát is meghaladhat. A legtöbbük vastagságú lemezekből összewaszolt dobozszerű szerkezetű részek. Ezek a fő részek, amelyek a hidrohordozó nehéz terheléseit és lövéseit viszik. A hidrohordozók rövid, háromdimenziós kereszthúzások dominálnak.
Több mint 1000 vashúzat és közepes vastagságú lapok többszintes, többszörös összefonása. Az összefonóvonal sűrű, rosszul hozzáférhető az összefonáshoz, és az összefonási minősége közvetlenül befolyásolja a műveleti terület biztonságos működését.
A szerkezet sajátossága és a folyamat bonyolultsága miatt a kézi összefonás nem garantálja az összefonás stabilitását és az összefonási minőség egyenlőségét.
Konvencionális robotösszefonás alkalmazása.
- Oktatásában programozás, r megszüntetésre van szükség, és alacsony a robot használata.
- A szerkezet bonyolult, keretek vannak keretekben és különböző méretekben, és több mint 1000 összefonással rendelkezik, szükség öt napot vesz igénybe a tanítás manuális programozásához.
- A munkatétel helyezése és gyártási pontossága nem felel meg a követelményeknek, és a koncentrált összefonás lokális hőformálódása okozza az összefonási eltolódást.
- Nagyon nehéz a teljes hidraulikus rendszer robotos zöldes automatizálását megvalósítani. támogatások strukturális részek.
A szénipariág egy vezető vállalata, amely a Minyue Technology egy gombnyomású indítással, oktatás nélküli intelligens zöldés megoldást alkalmaz.
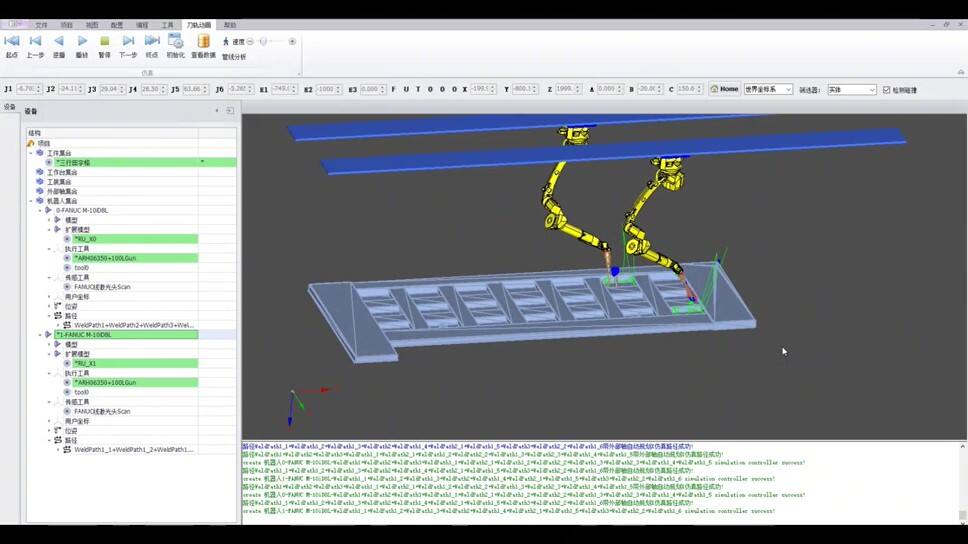
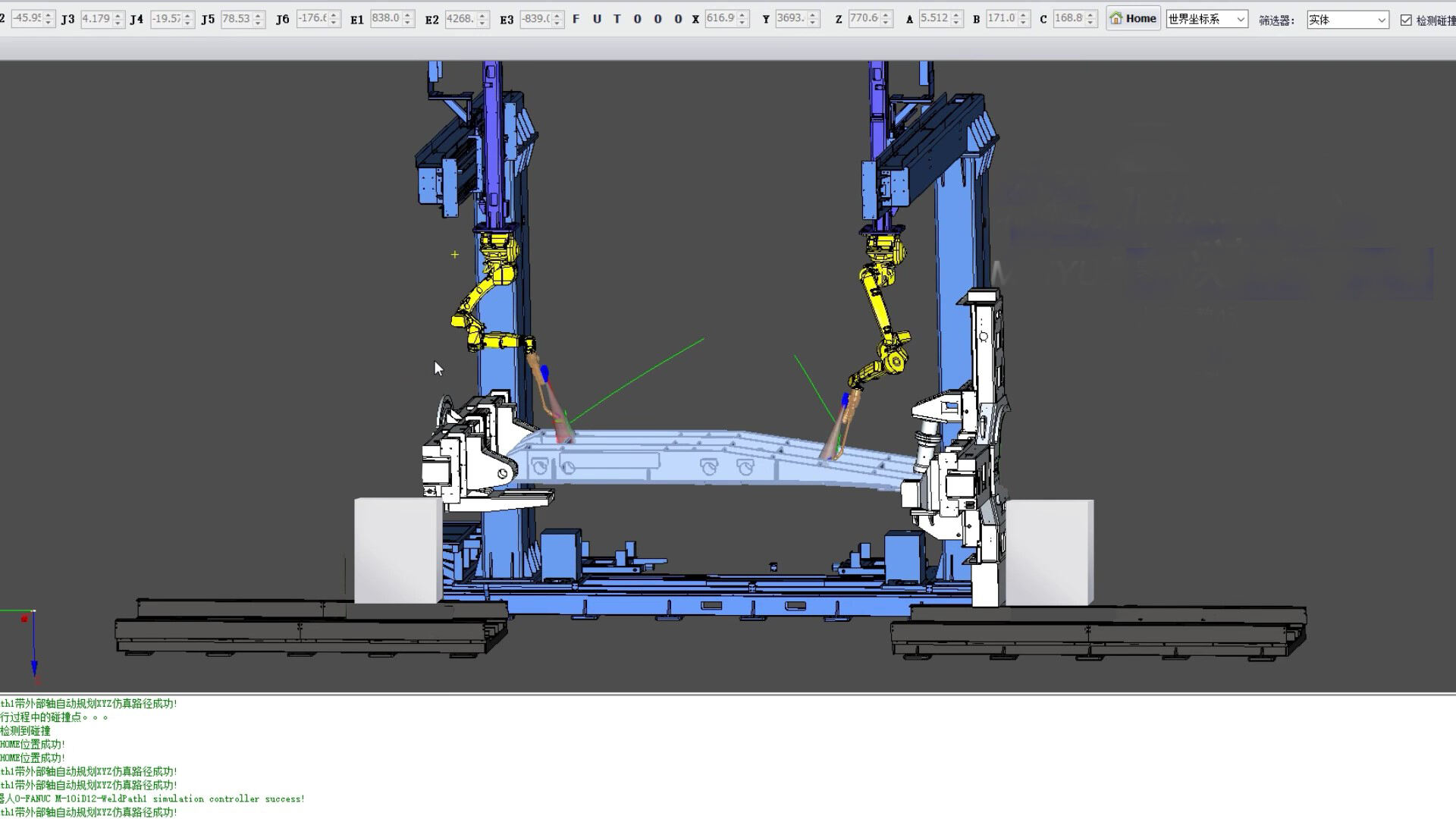
Lépés 1: A vevőnk a 3D munkaegység modelljét importálja a RobotSmart - Intelligens Döntési Rendszerbe.
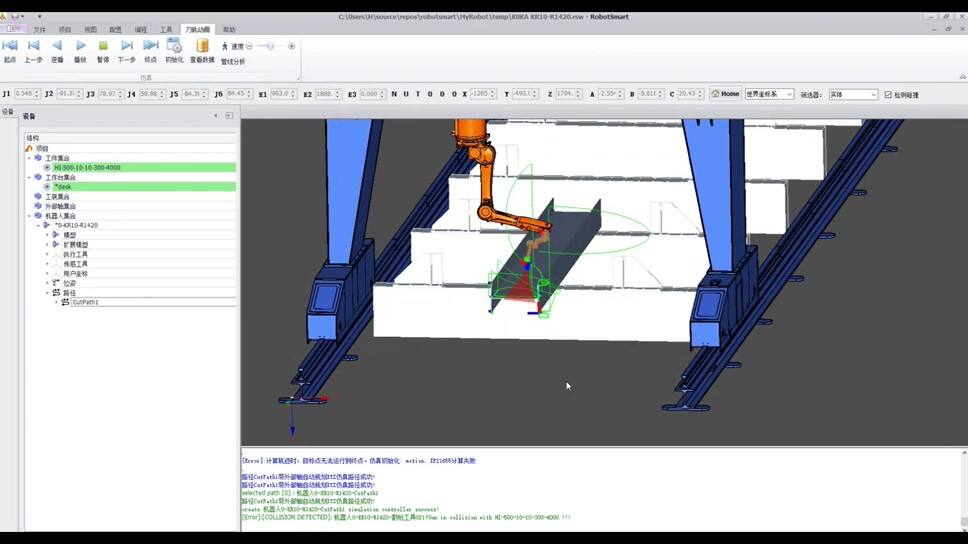
Lépés 2: A RobotSmart - Intelligens döntési rendszer, amely képes gyors és automatikus ipari robot trajektória generálásra, valamint robotmozgás szimulációjára, ütközés észlelésére, egyedi elkerülésére és tengelykorlát-ellenőrzésre.
Lépés 3: A SmartVision-3D két szemű strukturált fény látórendszer a munkaegység fokozott pozicionálását végezi. A 3D két szemű strukturált fény látórendszer a munkaegység felületét skánolja és fordított modellezést hajt végre a pontfelhő adatokból. A munkaegység felületi jellemzőit modellezési pontossággal ± 5 mm beli pontossággal helyreállítja. A munkaegység gyártási és kezdeti pozicionálásának érzékelése 40 mm beli pontossággal. ,Érzékelheti az összerakási szöget 10 ° belül. Érzékelheti a zöldés hosszúságának változásait 30 mm belül (szabályozható). 。
Lépés 4: SmartEye - Lézeres látási nyomvonal követő rendszer. A zármirigy szénakészképezés, a zárlás pozíciójának és az információk ellenőrzése, a 3D számítógépes modell és a valós munkaadó zárlás helyzetének korrekciója, valamint a valós zárlás helyzeti adatok megszerzése. Több robotot, több külső tengelyt és pozicionálót együttműködő munkavégzés támogat.
SmartVision-3D kétlenséges szerkezeti fény-látási rendszer 3D modellek importálása rajzolásra ,A megkapott 3D pontfelhő adatok összevetése a 3D számítógépes modell adataival ,A robot csak 3D pontfelhő adattal rendelkező zárlásokat hajtogat. Amikor a szenzor által kapott pontfelhő adatok illeszkednek a 3D modellhez az új komponensekkel berendezett munkaterületen, az új komponenseket hajtogatják.
Valóban egy gomb lenyomásával indítható el a termelés, 2 perc alatt elindul az ív, gyors, pontos, teljesen program nélkül, nagy hatékonysággal és pontossággal.
Technológiai vezetőség, ipari figyelmek.