 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Földalapú rácstípusú IIntelligens Üvöltőrobotállomás acélszerkezetekhez

A földalapú üvöltőrobot intelligens Friendess tanítás nélküli üvöltőrendszerrel és nagy látó távolságú választató nyomkövető rendszerrel van ellátva. Direkt importálni képes Tekla, SolidWorks vagy UG 3D modellfájlokat, közvetlenül párosíthatja az üvölési folyamatparamétereket, automatikusan azonosítja a pontos üvölési helyet és létrehozza a legjobban optimalizált üvölési folyamatot az üvöleteléshez.
A talpvasú típusú sétáló tengely növeli a hosszirányú alkalmazhatóságot. A robot kapcsolódhat a talpvasúhoz, hogy egy időben hosszabb zsebötörést összavashagyjon, és a munkaállomás mindkét oldalon használható a vasúton. Főként H alakú gerinc fedélzetek, oszlop alaplapok, hegény támogatólapok, körözési elemek és más szerkezetek vonászására használják.
| Robot | 1 db Fanuc robot |
| Választható vonászóerőforrás | Aotai vonászógép és annak mellékletei vagy Megmeet vonászógép és annak mellékletei |
| Vonászó rendszer | MINYUE tanítás nélküli offline programozási vonászó szoftver, MINYUE laser látó követőrendszer. |
| Alkalmazható forgatókönyvek | Alkalmazható támasztalpallok, körözési részekre, kis szerkezeti elemekre stb. Jelenleg használható H alakú főgerinc és másodlagos gerincenként a vasépítésben, hajóhíd kis és közepes méretű lapegységeiben, eszköz H alakú acéloszlopon, eszköz platformtengelyek és más szerkezetekben. |
| Lőcstisztító rendszer | SC220A lőcstisztító rendszer |
| Talpvasú hossz | 6 méter (választható a felhasználótól függően) |
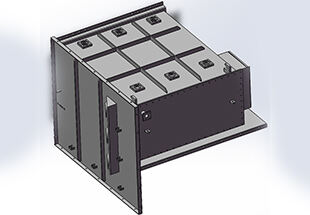
Fegyverponttisztító Rendszer
Az SC220A fegyverponttisztító állomás egy eszköz robotos vízszintes fegyverek tisztítására. Használatos automatikus tisztításra a robotos vízszintes feldolgozás során, amely automatikusan levágja a vízszintes szennyeződést, vágja a drótketereket, és védi a vízszintes nyelűrét és kapcsolótípust, növelve a vízszintes élettartamát és spórolva pénzzel. Csökkenti az anyagfogyasztást, fenntartja a jó vízszintépítési minőséget és növeli a vízszintépítési hatékonyságot. Egyszerű működés és könnyen használható.
Előnyök a fegyverponttisztító állomásoknál: 1. A fegyverponttisztítás rövid ideig tart, és a rendszer elérhetősége magas. 2. Automatikusan teljesíti a fegyverponttisztítási folyamatot anélkül, hogy emberi beavatkozás lenne szükséges. 3. Megakadályozza a minőségi problémákat a vízszintépítés során bekövetkező terhelésektől. 4. Robot TCP kalibrációs rúddal van ellátva.
Robotos vízszintépítési szoftver
A szoftver automatikusan kinyerheti a vízszintes vonalakat a rajzokból, akár nélkülük a vízszintes jelezés nélkül is, csökkentve a kézi részvétel munkaterhelését. A nagy teljesítményű 3D motort és robotvezérlővel a rendszer automatikusan létrehozott pontokat szimulálja és ellenőrzi, hogy elkerülje a valós munka során bekövetkező ütközéseket.
Rajz típus nélkül, 3D skennel visszafordított modellezés, gyors generálás 3D rajzokra, robotos vízszintes pályagenerálás, vízszintes pálya optimalizálása, viselkedés vizualizációja, automatikus vízszintes lógó ütközés érzékelése.
LDWP-305 laser nyomkövető
Az LDWP-305 egy intelligens vonalvásárló ütemező élesztő érzékelő. Vonalásos laser-felderítés segítségével szerez be kontúrinformációkat a zármetszetre vonatkozóan, és irányítja a robottal vagy a zárógéppel való automatikus zárást. Az képfeldolgozás, az elemzés és a záróvonal azonosítása az érzékelő belsejében történik, nem igényel külső számítógépet. Nagy integrációs fokkal rendelkezik, és csökkenti a rendszer általános hardveres költségeit. Arcsvilágosságra és szórásra van rá akadályozva, intelligens záróvonalként azonosítja, és könnyen használható. Finom szerkezetű, kompakt méretű, jól elérhető, és gazdag típuskínálatot kínál. Alkalmazási forgatókönyvtől függően lehet kiválasztani és testreszabni a legmegfelelőbb paramétereket.

Előnnyel
1. Támogatja a tanítás nélküli működést különféle termékek esetén, például sanduízsavakkal, rácsgerendákkal, záróelemmel, híd-elválasztókkal és paneltartókkal;
2. Nem szükséges a tervezési szakaszban megjelölni a tömörhelyeket, és a célzott tömörpozíciót automatikusan kinyerheti a 3D rajzok importálásával;
3. Nem szükséges emberi beavatkozás, a robot automatikusan végzi el a nullázást, átmeneteket, pozíciókeresést, tömörészt, számolást és lőrócska tisztítását;
4. Nem szükséges helyszíni művelet, a program bármikor és bárhol létrehozható, és távolról elküldhető a robotnak a megadott időpontban való termelésre;
5. Saját fejlesztésű offline programozás, 1:1 szimulálja a robot mozgásait, előzetesen elkerüli a robot interferenciáit és ütközéseket;
6. Digitális ikrek technológiája valós idejűben megjelenítheti a helyszíni robot trajektóriát, a tömörfeszültséget, áramot, sebességet és más termelési információkat.
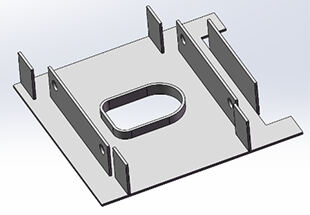
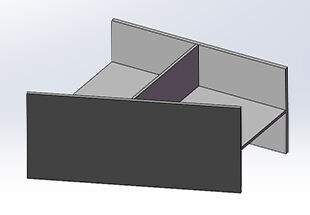
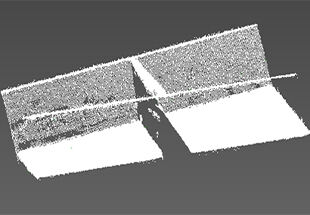
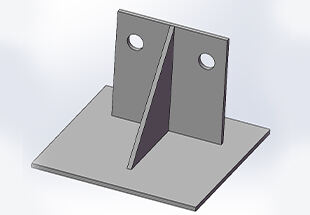
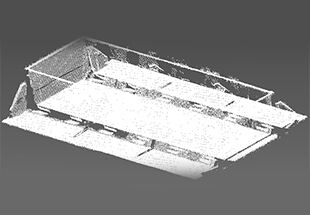
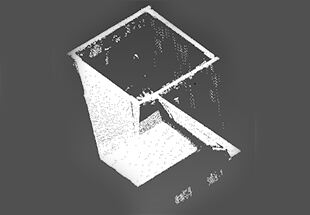
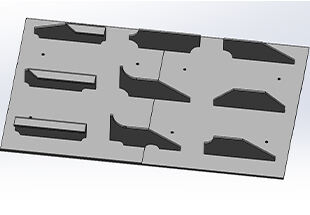
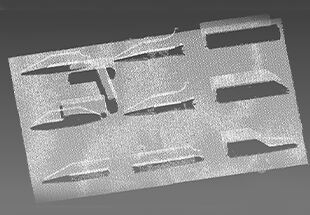
| Nem | Munkaadat típusa | Munkaadatmodell képe | Munkaadat pontfelhő képe |
| 1 | H alapú gerendák (Beleértve a csatlóztömöröket) | 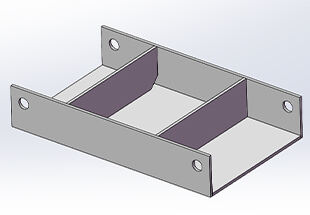 |
 |
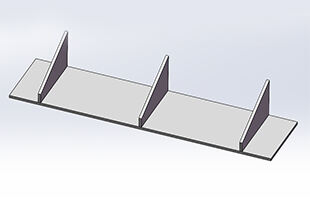
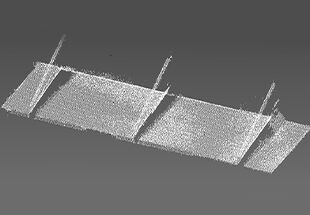
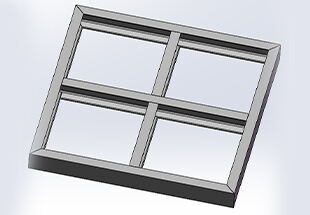
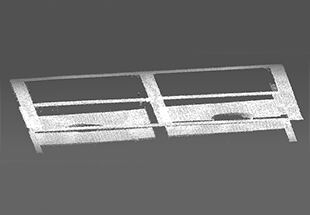
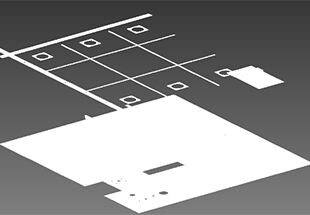
| 2 | Lap egység |
 |
 |
| 3 | Acéloszlop |
 |
 |
| 4 | Törpeoszlopos |
 |
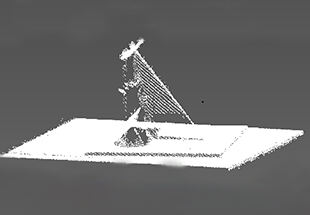 |
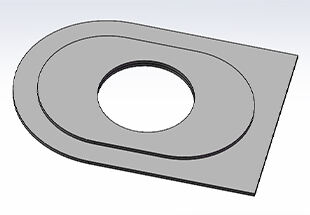
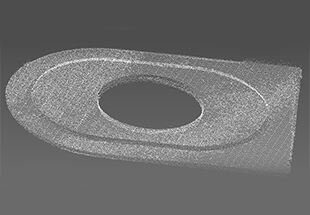
| 5 | Gerendatámla támogatólap |
 |
 |
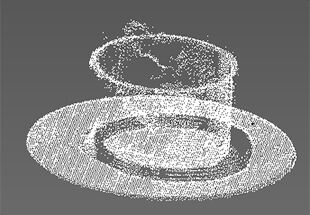
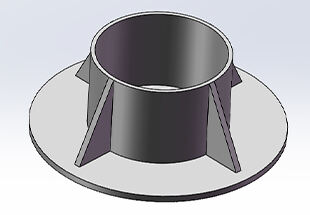
| 6 | Kör alapcső |
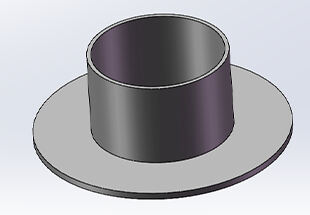 |
 |
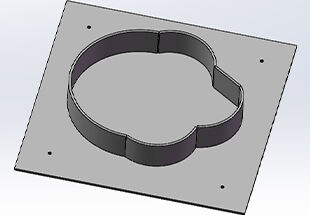
| 7 | Kereszt alakú kör csövek alapja |
 |
 |
| 8 | Idegen felület |
 |
 |
| 9 | Kétrétegű lap |
 |
 |
| 10 | Csatornaferde gyüjtés |
 |
 |
| 11 | Dupla-szoványtömörítés | 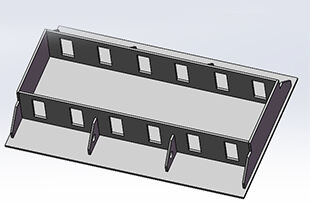 |
 |
| 12 | Dobozsugár |
 |
 |
| 13 | Rendszerintelen hajlításos vízszintes összekötés |
 |
 |
| 14 | Transzformátor tároló |
 |
 |





