 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


روبوت درستکاری هوشمند غیرآموزشی سازه فولادی با طراحی گاتر

ربات پیوند فلزی گانتری ساختار فولادی
این تجهیزات، ربات پیوند فلزی اختصاصی برای ساختارهای فولادی است که برای تولید خودکار در کارخانجات ساختار فولادی سفارشی ساخته شده است.
این تجهیزات، ربات پیوند فلزی اختصاصی برای ساختارهای فولادی است که برای تولید خودکار در کارخانجات ساختار فولادی سفارشی ساخته شده است.
1. این تجهیزات عمدتاً از بخشهای زیر تشکیل شده است: قطعات ریل، قطعات گانتری، قطعات تنظیم ربات، جعبه کنترل الکتریکی، قطعات منبع تغذیه پیوند فلزی، و غیره.
2. اجزای گیرنده عمدتاً شامل چارچوب محرک، تیر عرضی و چارچوب تنظیمی هستند. تیر محرک، تیر عرضی و چارچوب تنظیمی همه ساختار پیوندی تیر جعبهای دارند و پس از پیوند، درمان فشاری خود را تجربه میکنند. ساختار فشرده است و ظاهر آن زیبا است.
3. تیر محرک فعال کل ماشین از محورنوا Panasomic ژاپنی با موتور AC سرو و موتور برای راندن کاهشدهنده SHIMPO ژاپنی استفاده میکند و سپس از طریق انتقال دندهای و دندهای، چرخ راهنمای افقی روی جانب تیر محرک نصب شده است. چرخ راهنما میتواند با تنظیم محور غیرمرکزی خود به ریل راهنما فشار دهد، که باعث میشود ثبات و دقت عملکرد کل ماشین تضمین شود.
۴. ریلهای جابجایی کارگیر همه از نوع ۳۸کیلوگرم/متر ساخته شدهاند. طرف بیرونی ریلها مجهز به دندههای دقیقسازی شده است. این دنده از فولاد ۴۵ با ماژول ۲٫۰ ساخته شده و از روش محور دوطرفه برای رانش استفاده میکند. ریلها از طریق تکههای فشاری و پشتیبانی ثابت میشوند. این روش نصب میتواند پارامترهای فنی مهمی مانند مستقیمبودن طولی و موازات دو ریل را تضمین کند.
پشتیبانی از درمان هوشمند غیرآموزشی به طور خاص به سه بخش تقسیم میشود: وارد کردن نقشه ۳D، استخراج خودکار خطوط لاستیکی، تولید خودکار مسیر لاستیکی ربات، نمایش بصری وضعیت، و تشخیص خودکار برخورد سوزن لاست.
تولید خودکار مسیر لاستیکی ربات، نمایش بصری وضعیت، بهینهسازی مسیر لاستیکی، و تشخیص خودکار برخورد سوزن.
و بدون نوع طرح، مدلسازی معکوس اسکن 3D، تولید سریع طرحهای 3D، تولید خودکار مسیر گچکاری ربات، بهینهسازی مسیر گچکاری، تجسم وضعیت، و تشخیص خودکار برخورد دهنده گچکاری.
پارامتر
| بزرگترین طول قطعه کاری | 11م |
| عرض فلنج | ۲٫۵ متر |
| معیار ردیف حرکت گانی | 2800 میلیمتر |
| توان موتور حرکت گانی | 2x0.75 kW |
| سرعت گچکاری حرکت گانی | 100-1000 میلیمتر/دقیقه |
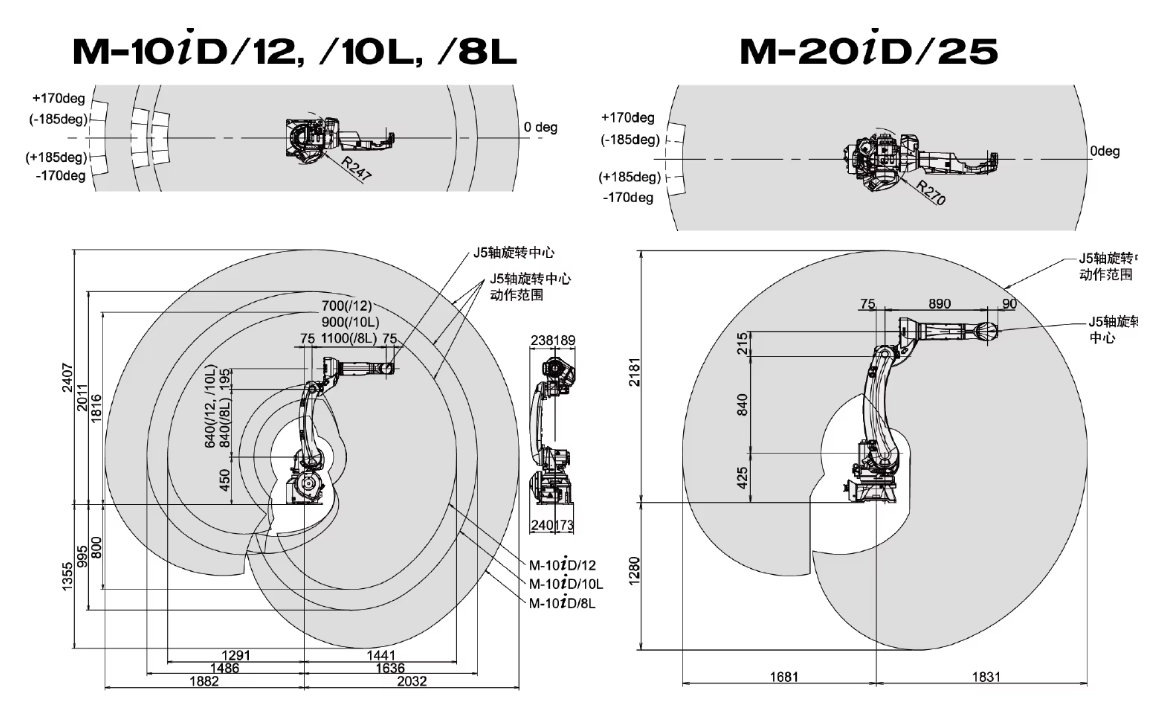
ربات گچکاری
از ربات گچکاری FANUC ساخت ژاپن استفاده میشود. پارامترهای دقیق ربات به شرح زیر است.
LDWEP-500 ردیاب لیزری
LDWEP-500 یک حسگر هوشمند اسکن خطی برای شناسایی خراطی است. این دستگاه از طریق اسکن لیزری خطی اطلاعات مربوط به شکل بخش مقطع خراطی را بدست میآورد و ربات یا ماشین خراطی را برای تکمیل خودکار خراطی راهنمایی میکند. عملیات جمعآوری تصویر، پردازش و شناسایی خراطی در داخل حسگر انجام میشود و نیازی به کامپیوتر خارجی ندارد. این حسگر دارای ادغام بالا است و هزینه سختافزار کل سیستم را کاهش میدهد. مقاوم در برابر نور قوس الکتریکی و پاشیدهشدگی، شناسایی هوشمند خراطی و عملکرد آسان دارد. ساختار دقیق، اندازه کوچک، دسترسی بالا و انواع مختلفی دارد. میتواند بر اساس سناریوی کاربردی انتخاب و استفاده شود و پارامترهای مناسبترین قابل سفارش باشد.

منبع توان خراطی فولاد ساختمانی سازه صنعتی H Beam ربات خراطی 6 تا 9 محور چین
استفاده از منبع توان دیگ مگمیت CM500: یک ماشین جذاب هوشمند صنعتی سنگین کاملاً رقمی برای پیوند CO2/MAG/MMA است. این ماشین به طور گسترده در حوزههای پردازش پیوند فولاد کربنی مختلف مورد استفاده قرار میگیرد: حمل و نقل ریلی، خودرو، ساخت کشتی، سازههای فولادی، کانتینر، ماشینآلات، سختافزار و صنایع دیگر، همچنین در عملیات باربری صنعتی و محیطهای سخت







