با کمک حسگرهای ردیاب خط، این دستگاه های مفید می توانند در پیروی ربات ها از خطوط و نگهداری روی مسیر صحیح کمک کنند. این حسگرها می توانند به عنوان چشم های ربات در نظر گرفته شوند. چشم های ما ما را می گذارند جایی که می خواهیم برویم را ببینیم، به طور مشابه این حسگرها می توانند به ربات ها اجازه دهند بدانند باید چگونه حرکت کنند؟ حسگرهای ردیاب خط از MINYUE برای کار با دقت ربات ها در حال عبور از مکان های مختلف برای انجام وظایف ضروری هستند. بیایید جزئیات بیشتری درباره ی اینکه این حسگرها چگونه کار می کنند و چه چیزی آنها را در سناریوهای مختلف مهم می کند کشف کنیم.
حسگرهای ردیاب خط کاری انجام می دهند که نامشان به آن اشاره می کند — آنها یک خط را که روی زمین گسترش یافته است دنبال می کنند. آنها این کار را توسط چیزی که نور فروسرخ نامیده می شود انجام می دهند. سنسور پرتو لیزری پروژه پرتوهای نوری را اجرا کرده و سپس اندازه میگیرد که چقدر از آن نور به آنها بازمیگردد. اگر حسگر خطی روی زمین تشخیص دهد، پیامی به مغز ربات ارسال میکند. این پیام دستور میدهد تا ربات جهت خود را تغییر دهد تا بر روی مسیر بماند. این شبیه به یک بازی است که در آن ربات باید روی خط باقی بماند بدون اینکه از آن فراتر رود!
با این حال، برای اینکه رباتها بتوانند وظایف خود را بدون کمک انسانها انجام دهند، حسگرهای ردیاب خط به عنوان یک قسمت مهم از فرآیند خودکار شناخته میشوند. اگر، مثلاً، یک ربات باید راه خود را از نقطه A به نقطه B پیدا کند، کافی است روی خط روی زمین باقی بماند. این موضوع به رباتها در محیطهایی کمک میکند که نیاز به عملکرد در مناطق مختلف دارند. این فناوری در زمینه مسابقات ربات نیز بسیار معروف است. رباتها باید در این مسابقات میزبانیها را حل کنند یا مسیرهای مشخص را دنبال کنند. پس چیست که سنسور نزدیکی لیزری آنها را در این وظیفه کمک میکند!
حسگرهای ردیاب خط کمک میکنند روباتها در محیطهای پیچیده ناوبری کنند و از یک سر به سر دیگر حرکت کنند. این تنظیمات میتواند شامل جاهایی مثل انبارهای فعال یا کارخانجات باشد که در آنها بسیاری از فعالیتها همزمان اتفاق میافتد. با استفاده از خطوطی که باید روی زمین دنبال کنید، روباتها میتوانند چیزها را از یک مکان به مکان دیگر به صورت امن و کارآمد منتقل کنند. حسگرهای ردیاب خط MINYUE بسیار مهم هستند زیرا به روباتهایی که در انواع مختلف بخشهای صنعتی کار میکنند، کمک میکند تا سریعتر و دقیقتر حرکت کنند. تمام اینها سنسور لیزر صنعتی در نهایت به روباتها اجازه میدهد تا کارهای خود را سریعتر و با دقت بیشتری انجام دهند.

از چند سال پیش برخی وسایل نقلیه خودران نیز نیاز به حسگرهای ردیاب خط دارند. وقتی روی جاده حرکت میکنید، معمولاً در خط خودتان میمانید، و این حسگرها حسگر سطح لیزری در هنگام رانندگی کمک میکنند تا این کار را انجام دهید. آنها همچنین به خودروهای خودران اجازه میدهند تا از موانع یا اشیاء در مسیر خود روی جاده پرهیز کنند. تشخیص خطوط و نشانههای دیگر جاده اجازه میدهد تا این نوع خودروها تصمیمات هوشمندی درباره چگونگی عطف، زمان شتاب دادن، و غیره بگیرند. این موضوع اطمینان میدهد که آنها به صورت امن و بدون اغتشاد عمل خواهند کرد، مشابه یک عملکرد اپراتور انسانی.

در کارخانهها، حسگرهای ردیاب خط MINYUE برای راهنمایی رباتها و ماشینها در خطوط تولید استفاده میشوند. مثلاً، مونتاژ بدون عیب در یک کارخانه حیاتی است. این حسگرها سنسر نور لیزر اطمینان میدهند که همه چیز درست باشد و محصولات به طور ملایم از فرآیند تولید عبور کنند. سازمانهای جهانی برای حداکثر کردن کارایی و دقت خط تولید خود به حسگرهای ردیاب خط اعتماد دارند. با تجهیز به این حسگرها، کارخانهها میتوانند محصولات را با کارایی بیشتر و با خطاهای کمتر تولید کنند.
استفاده از عملکرد یافتن و ردیابی، اسکن شwen ناخص، تأیید موقعیت و اطلاعات ناخص، اصلاح موقعیت ناخص بین نقشه طراحی سه بعدی دیجیتال و قطعه واقعی، و حل مشکل ناخص عرضی ناشی از خطا در مواد ورودی و تغییر شکل گرمایی.
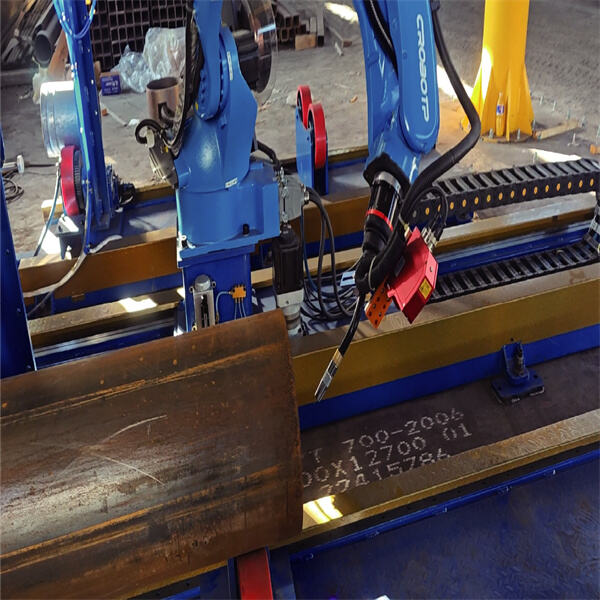
شرکت فناوری بجینگ مینیو، به عنوان بزرگترین شرکت فناوری پیشرفته جهان در حوزه کاربردهای هوشمند غیرآموزشی رباتهای صنعتی، تخصص خود را در تولید سیستمهای تولید هوشمند انعطافپذیر قرار میدهد. ما با سیستم تصمیمگیری هوشمند RobotSmart، سیستم بینایی هوشمند SmartVision - نور ساختاری دوچشمی، و سیستم ردیابی خط لیزری SmartEye - بینایی لیزری، راهحلهای جدیدی برای درمان و برش رباتهای هوشمند ارائه میدهیم.
سریع، دقیق، کاملاً بدون برنامهنویسی، با کارایی و دقت بالا. این موضوع فرآیند آموزش پیچیده رباتهای سنتی را حل میکند و زمان دوبارهسازی فرآیند آموزش را صرفهجویی میکند.
فراهم کردن ربات درمان قدرتمند با بارگذاری از جلو، بارگذاری از طرفین، بارگذاری معکوس، نصب گنتری، برنامهریزی مسیر هوشمند برای چندین ربات، چند محور خارجی و پوزیشنر برای همکاری در کار. به منظور شبیهسازی حرکت ربات، تشخیص تصادف، اجتناب از تکینگی و تشخیص محدودیت محور.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








