 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



LDWP-305 حسگر ردیف لیزری
با اصلاح موقعیت و انحراف، ردیابی زنده، اسکن کردن و عملکرد جهش خودکار.
- خلاصه
- پشتیبانی از برند ربات
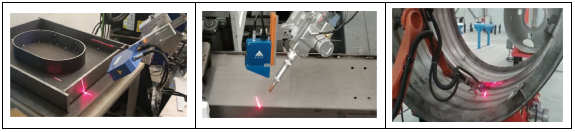
سنسور از سنجش نور ساختاری خطی استفاده میکند، که دارای سرعت تصویربرداری خطی سریع، بدون تماس و بدون حرکت مکانیکی است؛ قابلیت تطبیق قوی، قادر به خروجی پارامترهای جوش؛ کاملاً فشرده، با رایانههای صنعتی خارجی و بسیاری از مزایای دیگر، در انواع مختلف جوشکاری خودکار استفاده میشود. بیتوجه به فرآیند جوش، میتوانیم حمایت قابل اعتماد و عملکرد پایداری ارائه دهیم تا نتایج عالی را در سناریوهای مختلف جوش تضمین کنیم.
این سنسور برای کاربردهای پیشرفتهتر مناسب است، زیرا به نور اضافی، آب و غبار (IP67) حساسیت ندارد و به تابش الکترومغناطیسی (EMC) مقاوم است.
با عملکرد قدرتمند
01. اصلاح موقعیت و انحراف
تابع اصلاح موقعیت و انحراف برای سناریوهای جوش انعطافپذیر قطعات مختلف با همان مدل اما تحملهای ناسازگار استفاده میشود. این تابع تضمین میکند که هنگام تغییر قطعات نیازی به مداخله دستی نباشد و ربات توسط سیستم اصلاح موقعیت و انحراف راهنمایی شود تا جوش دقیق ایجاد کند.
موقعیت دو نقطهای مناسب برای جوشهای 2D تعویضی خط مستقیم است.
موقعیت گذاری چند نقطه ای مناسب برای جوشکاری های 2D با افست چند بخشی
موقعیت گذاری بخشی مناسب برای جوشکاری های 3D با افست چند بخشی.
02 ردیابی در حین وقوع
عملکرد ردیابی در حین وقوع در سناریوهای جوشکاری نیازمند کارایی بالا و بدون مداخله فضایی استفاده می شود. سنسور نسبت به تورچ جوش ثابت است و تورچ جوش به طور خودکار مسیر جوش را بر اساس داده های مختصات 3D تنظیم می کند.
03. اسکن و جوشکاری خودکار
عملکرد اسکن و جوشکاری خودکار اجازه می دهد سنسور ابتدا اطلاعات هندسی جوش ها را جمع آوری کند. این عملکرد برای فضاهای جوشکاری با عکسپردازی بالا، ضییل و سناریوهای جوش پیچیده مناسب است.
ردیابی جوش لیزری
ردیابی جوش لیزری می تواند انحرافات جوش بالا، پایین و چپ و راست را تشخیص دهد.
می تواند جوش های جویبار با شکاف های کوچک را تشخیص دهد.
حل مشکل ردیابی جوش برای جوشکاری جویبار بلاته.
فاصله مشاهده بهینه حدود 150 میلیمتر است.
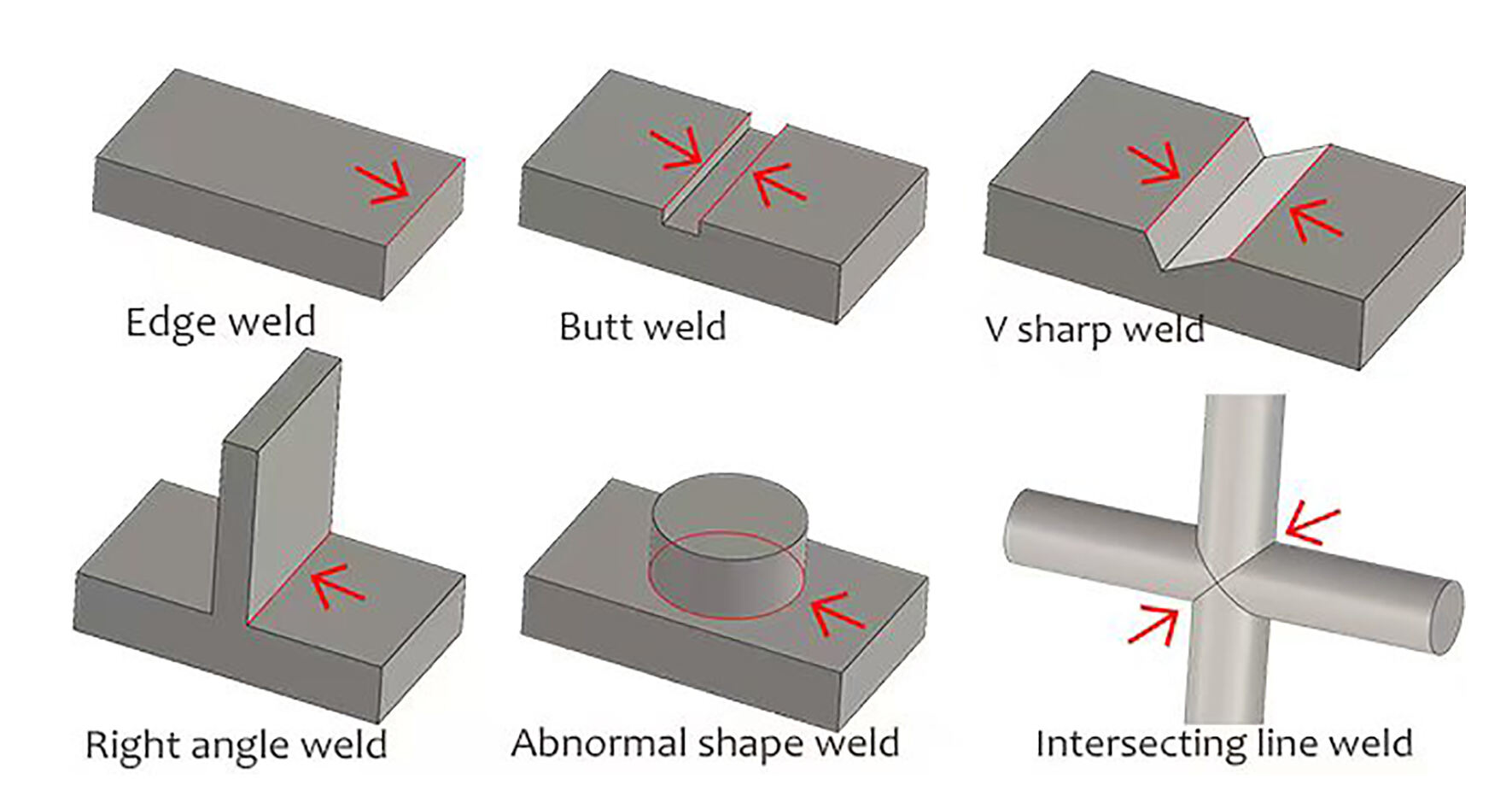
نوع پیوند پشتیبانی شده
پیوند گودال V
پیوند فیلت
پیوند همینگ
پیوند جوخهای
پیوندهای لپ و غیره.
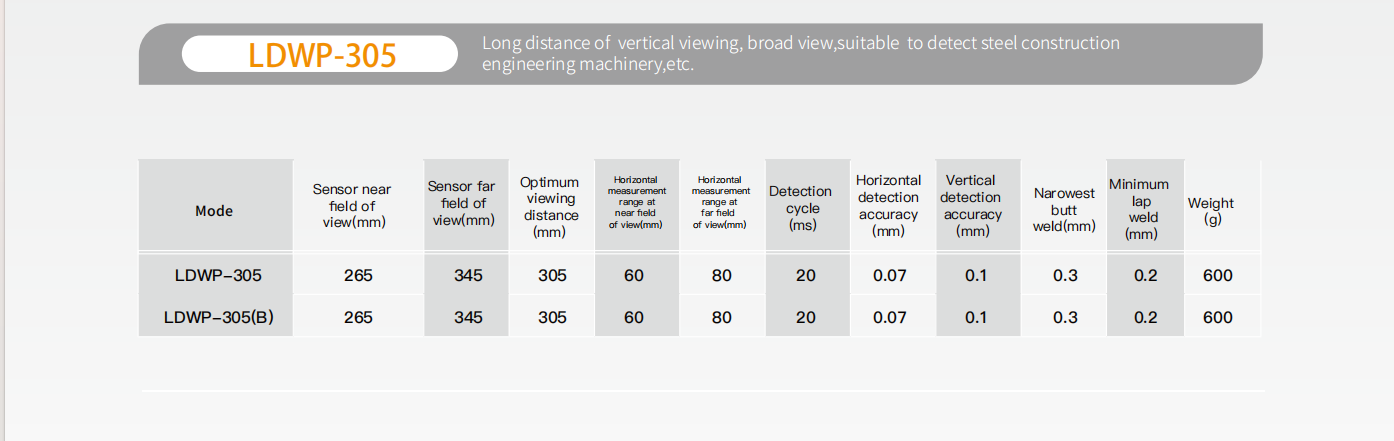
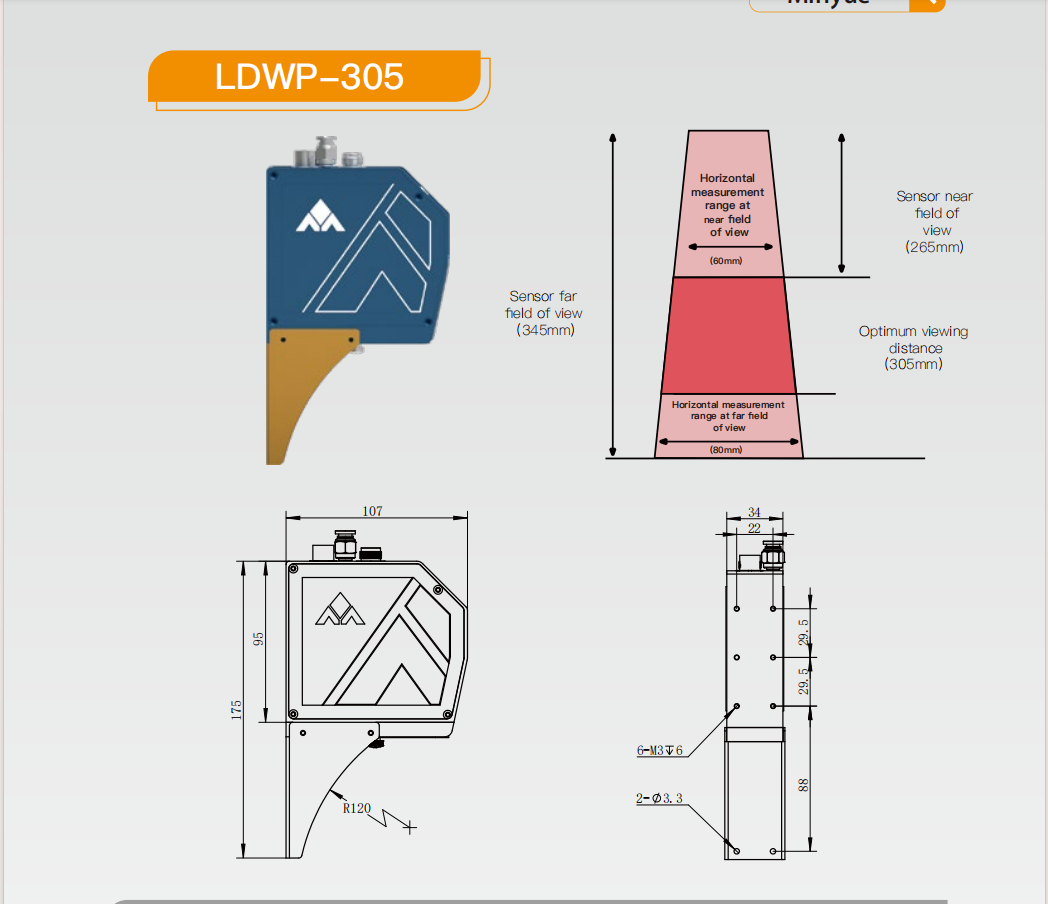
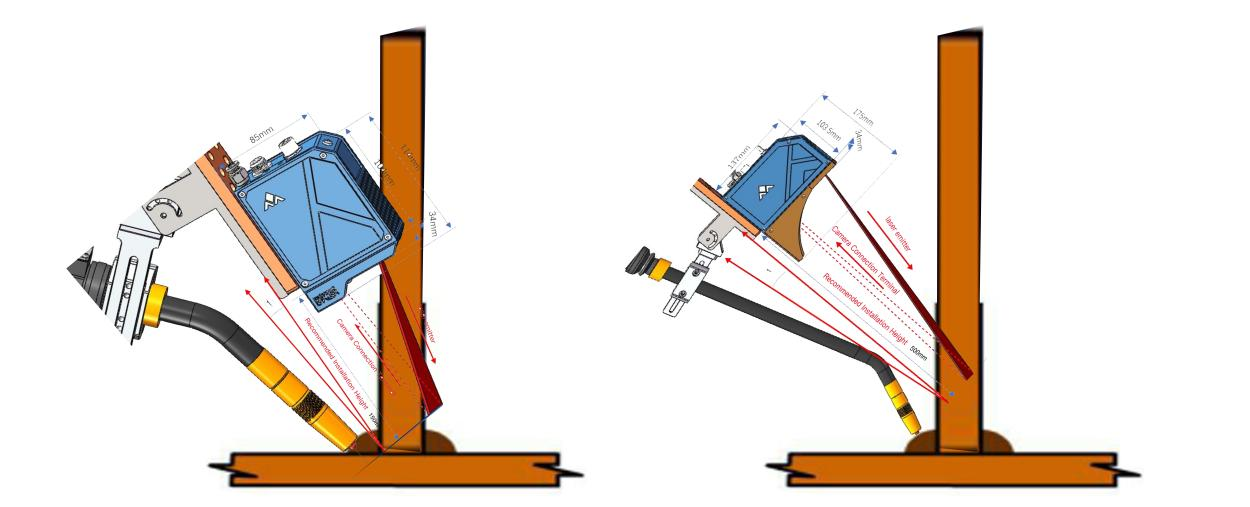
فاصله مشاهده عمودی بلند، دید گسترده، مناسب برای صنعت سازههای فولادی و ماشینآلات ساخت و ساز.
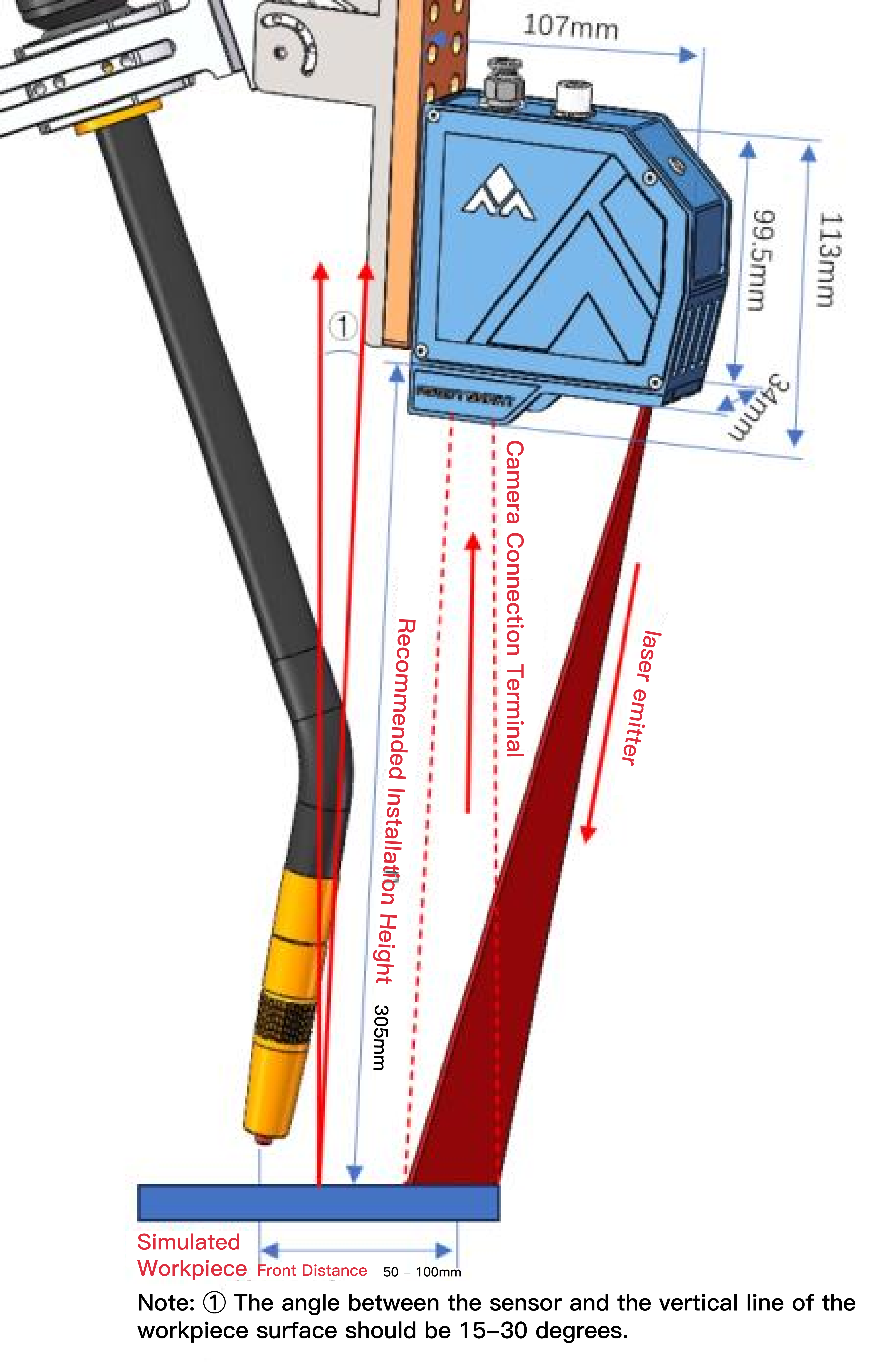
لطفاً نوع را بر اساس حوزه کاربرد واقعی منطقی انتخاب کنید تا از برخورد کاربرگ با حسگر جلوگیری شود، بار ربات معمولاً باید حدود ۲۰ کیلوگرم باشد.
شرکای همکاری

پشتیبانی از برند ربات







