ہم سب جانتے ہیں کہ روبوٹوں کے ساتھ کام کرنا مشکل ہوسکتا ہے، لیکن جب آپ کو صحیح معلومات اور تجربہ ہوتا ہے تو یہ بہت آسان ہوسکتا ہے۔ MINYUE آپ کو روبوٹ کے ساتھ کام کرنے کی تعلیم دینے کے لئے یہاں ہے اور اسے سب سے بہتر طریقے سے کرنے کی کوشش کرتا ہے۔ یہ گائیڈ آپ کو یہ بتائے گا کہ کیسے آپ روبوٹ کو چلانے کے لئے استعمال کریں۔ روبوٹ ہیندلنگ سسٹم , ان کے حرکات کو کنٹرول کرنے کا طریقہ، اور یہ کس طرح سلامت اور محفوظ طریقہ سے کیا جا سکتا ہے۔
پہلے تو مختلف قسم کے روبوٹس کے بارے میں۔ دو اہم قسم کے روبوٹس ہوتے ہیں جن کے بارے میں آپ کو علم ہونا چاہئے: ثابت روبوٹس اور متحرک روبوٹس۔ جب ہم ثابت روبوٹس کو ذکر کرتے ہیں تو یہ وہ ہوتے ہیں جو کھینچ نہیں پڑتے۔ انہیں عام طور پر کارخانوں میں استعمال کیا جاتا ہے تاکہ کام کمپوننٹس جیسے ملے۔ اس کے برعکس، متحرک روبوٹس کو اطراف و احاطہ کو نیوگیٹ کرنے اور منتقل ہونے کے لئے بنایا جاتا ہے۔ یہ روبوٹس متحرک شکل کے ہوتے ہیں جو عام طور پر ڈیلیوری یا صفائی کے مقاصد کے لئے استعمال کیے جاتے ہیں۔ یہ سمجھنا اہم ہے کیونکہ یہ آپ کو درست انتخاب کرنے اور درست کام کے لئے درست روبوٹ منتخب کرنے میں مدد کرتا ہے۔
اب چلیے مینیو روبوٹ کنTRL پر بات کرتے ہیں۔ روبوٹ کو منتقل کرنے کے لیے استعمال ہونے والی بنیادی واجہا جوڑی یا سلسلہ بٹن ہوسکتی ہے جس کے ذریعے آپ تمام چار علاوِں میں حرکت کنٹرول کرسکتے ہیں۔ کنٹرولز کے ساتھ تجربہ کرنا ضروری ہے، تاکہ آپ کو یہ معلوم ہو روبوٹ کس طرح حرکت کرتا ہے اور کس طرح جواب دیتا ہے۔ روبوٹ کو کوڈ نامی تعلیمات کے ذریعے پروگرام کیا جا سکتا ہے۔ یہ کوڈ روبوٹ کو بتاتا ہے کہ اسے کس طرح منتقل کیا جائے اور کونسا کام پورا کیا جائے۔ روبوٹ کو تسلط حاصل کرنے کے لیے، آپ کو پروگرامنگ پر تسلط حاصل کرنا چاہئے، جو اب ایک بنیادی مہارت ہے۔
روبوٹوں کو مرکزی طریقے سے حرکت کرنے کی بھی ضرورت ہوتی ہے، اور یہ ممکنہ طور پر زیادہ پیچیدہ ہوسکتا ہے۔ کیونکہ بعض اوقات یہ چیزیں بہت پیچیدہ ہوتی ہیں، ہم انھیں قابلِ تدبر حصوں میں تقسیم کرنے کی کوشش کرتے ہیں۔ مثلاً، اگر آپ کسی روبوٹ کو کمرے کے ایک سر سے دوسرے سر تک لے جانا چاہتے ہیں تو شاید آپ کو پہلے روبوٹ کو دوبارہ سمت دینا پڑے تاکہ وہ درست طرف سامنا کرے۔ پھر آپ اسے ایک ثانیہ آگے بڑھائیں گے اور بعد میں گرداؤ کریں گے تاکہ وہ آپ کی ضرورت کے مطابق جائے۔ یہ MINYUE کو بناتا ہے خودکار مواد کے سنبھالنے والے روبوٹ روبوٹ کو سنبھالنے میں آسانی ہوتی ہے۔ آپ حسّاسات (سنسرز) بھی استعمال کرسکتے ہیں، جو روبوٹ کو اپنے محیط کو سمجھنے میں مدد دیتے ہیں۔ حسّاسات روبوٹ کو روکوں سے باز رہنے اور زیادہ خالص طور پر ناول کرنے میں مدد کرتے ہیں، جو آپ کے کام کو سنبھالنے والے کے طور پر آسان بناتا ہے۔

روبوٹ ہینڈل کرنے سے بچنے پر خواص وقت ضائع ہوتا ہے۔ اور جتنا زیادہ آپ تعلیم حاصل کرتے ہیں، روبوٹ سے مألوف ہوجاتے ہیں، روبوٹ کو کنٹرول کرتے وقت آپ کی اعتماد برقرار رہے گی۔ آپ اپنے مہارت کو بھی روبوٹ کے پروگرامنگ کو فائن ٹیون کرتے ہوئے شاندار بنा سکتے ہیں۔ یہ آپ کے لکھے کوڈ میں نافذ تبدیلیاں کر سکتا ہے تاکہ روبوٹ کی حرکت میں بہتری آجائے اور وہ کام کو زیادہ کارآمد طریقے سے کر سکے۔ منظم تدریب اور ضرورت پड़نے پر تبدیلیوں کے ساتھ، آپ کی روبوٹ ہینڈل کرنے کی روبوٹک آرم ویلنگ مہارتیں بہت زیادہ بہتر ہو جائیں گی۔

روبوٹوں کے ساتھ کام کرتے وقت، حفاظت ایک اہم پرجوش ترکیب ہے۔ ہمیشہ حفاظتی نئیلیوں اور روگاں کا پابندیہ بنا رکھیں تاکہ آپ اور دوسرے لوگ بچ جائیں۔ جب آپ روبوٹوں کے ساتھ کام کر رہے ہیں تو اپنے گردشین کے بارے میں واقف رہیں کیونکہ وہ کभی کभی بغیر انذارے حرکت کر سکتے ہیں۔ عمل کو آسان بنانے کے لئے یقین کریں کہ مناسب روبوٹ ضروری کام کر رہا ہے۔ مثلاً، اگر آپ کو بڑے وزن کے اشیاء کو منتقل کرنے کی ضرورت ہے تو آپ کو وزن اور بحران کرنے کے لئے ڈیزائن شدہ روبوٹ استعمال کرنا چاہیے۔ علاوہ ازیں، سنسورز اور خودکاری آپ کو کم وقت اور توانائی کے ساتھ زیادہ کام کرنے میں مدد کرسکتی ہے۔ خودکاری آپ کے لئے کچھ کام کر سکتی ہے تاکہ آپ وقت بچا سکیں اور اپنا کام آسان بنایں۔
تیزی سے، مکمل طور پر براہ راست، کم کارلگی اور بالکل تجزیاتی ٹیچنالوجی۔ یہ تقسیم کرتا ہے سافٹ ویئر کو مشکل بنانے والے عمل کو اور ٹیچنالوجی کے عمل کو روکنے سے بچاتا ہے۔
بیجنگ مینیو ٹیکنالوجی کمپنی، لمیٹڈ، صنعتی روبوٹس کے غیر تعلیمی ذکی اطلاق کے عالمی نمائندہ بلند ترین ٹیکنالوجی کمپنی ہے۔ ہم خود شروع کردہ RobotSmart - ذکی فیصلہ سازی نظام، SmartVision - دونوں چشم ساختی روشنی وژن نظام، اور SmartEye - لیزر وژن سیم ٹریکنگ نظام پر تخصص رکھتے ہیں۔ نئی پیداوار ذکی روبوٹ چڑیا جوڑنے اور کٹنے کے حل فراہم کرتے ہیں۔
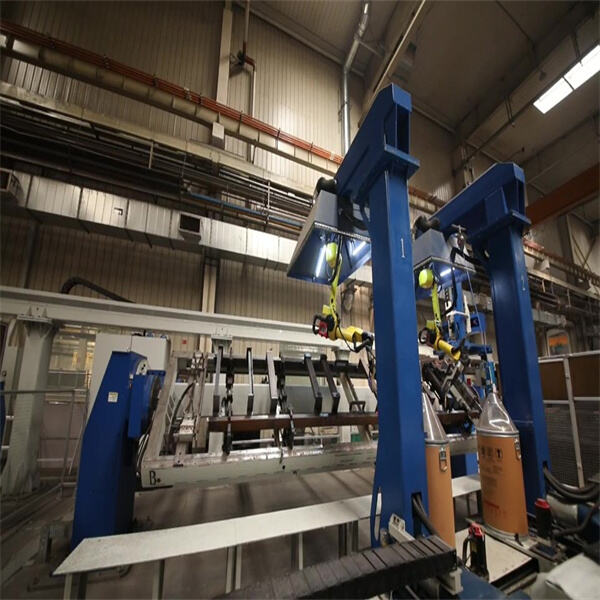
قدرتمند ویلنگ روبوٹ فراہم کرتا ہے آگے لوڈنگ، سائیڈ لوڈنگ، معکوس لوڈنگ، گینٹر Маунٹنگ، متعدد روبوٹس کے لئے ذکی مسیر تجویز، متعدد بیرونی محور، اور پوزیشنر برائے معاونت کام کے لئے۔ روبوٹ موشن سمولیشن، ٹکر کا شناسہ، منفردیت کا بازی کرنا اور محور حد شناسائی کو حاصل کریں۔
تلاش اور ترکیب کے فنکشن کو اپنائیں، چڑیا جوڑنے کی سیم کو اسکین کریں، چڑیا جوڑنے کی سیم کی پوزیشن اور معلومات کو تصدیق کریں، 3D ڈجیٹل ماڈل ڈرافٹ اور حقیقی ورک پیس کے درمیان چڑیا جوڑنے کی پوزیشن کو مطابقت دیں، اور داخلہ مواد کی غلطی اور گرما کی تبدیلی کی وجہ سے چڑیا جوڑنے کی مسئلہ حل کریں۔
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









