 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Öğretim Gerektirmeyen Çelik Yapı Tavanlı Akıllı Kaynaklama Robosu

Çelik Yapı Kemer Kaydırıcı Robotu
Bu ekipman, çelik yapı fabrikaları için otomatik üretim özel olarak tasarlanmış bir çelik yapı kaydırıcı robotudur.
Bu ekipman, çelik yapı fabrikaları için otomatik üretim özel olarak tasarlanmış bir çelik yapı kaydırıcı robotudur.
1. Ekipman ana olarak şu bileşenlerden oluşur: ray parçaları, kemer parçaları, robot ayarlaması parçaları, elektrik kontrol kutusu parçaları, kaydırma güç kaynağı parçaları vb.
2. Kemer bileşenleri ana olarak sürüş uç çerçevesi, geçiş kolu ve ayarlama çerçevesi gibi elemanlardan oluşur. Sürüş uç kolu, geçiş kolü ve ayarlama çerçevesi tümüyle kutu kolu kaydırma yapısı kullanılarak monte edilir ve ardından kaydırma sonrası gerilim azaltma işlemine tabi tutulur. Yapısı kompakt ve görünümü estetiktir.
3. Makinenin aktif sürüş ucu Japon Panasonic AC servodrayfi ve motoru ile hareket ettirilir, ardından bu hareket Japon SHIMPO azaltma motoruna aktarılır ve dişli-çark ile iletilir. Sürüş ucu üzerinde yatay bir rehber tekerlek monte edilmiştir. Rehber tekerleği, eksantrik eksenini ayarlayarak raylara basılabilir, böylece makinenin çalışması sırasında istikrarı ve doğruluğunu sağlar.
4. Arabanın hareketli rayları tamamı 38KG/M'den yapılmıştır. Rayların dış kenarlarına kesin şekilde işlenmiş dişliler takılmıştır. Dişli, 45 çeliği kullanılarak üretilmiş ve 2.0 modülüne sahiptir. Çift yanlı sürüş yöntemi kullanılmaktadır. Raylar, bastırma plakaları aracılığıyla sabitlenmiştir. Bu montaj yöntemi, iki rayın uzunluk boyunca düzgünlik ve paralellik gibi önemli teknik parametreleri garanti altına alır.
Öğretim dışı zeka destekli kaynaklı welding'e ilişkin destek, 3D çizim içe aktarma, welding jantının otomatik çıkarma, robot welding yörüngesi otomatik oluşturma, durum görselleştirme ve welding torşininin çarpışma otomatik algılama olacak şekilde özel olarak bölünmüştür.
Robot welding yörüngesi otomatik oluşturma, durum görselleştirme, welding yörüngesi optimizasyonu ve torşunun çarpışma otomatik algılama.
Ve çizim türünden bağımsız olarak, 3B tarama tersine modelleme, hızlı 3B çizim oluşturma, robot kaynaklama yörüngesi otomatik oluşturma, kaynaklama yörüngesi optimizasyonu, durum görselleştirme, kaynak aletinin otomatik çarpışma algılama özelliği.
Parametre
| İş parçası maksimum uzunluğu | 11m |
| Flanş Genişliği | 2.5m |
| Kapı kolu hareket ray açıklığı | 2800 mm |
| Kapı kolu hareket motor gücü | 2x0.75 kW |
| Kapı kolu hareket welding hızı | 100-1000 mm/dk |
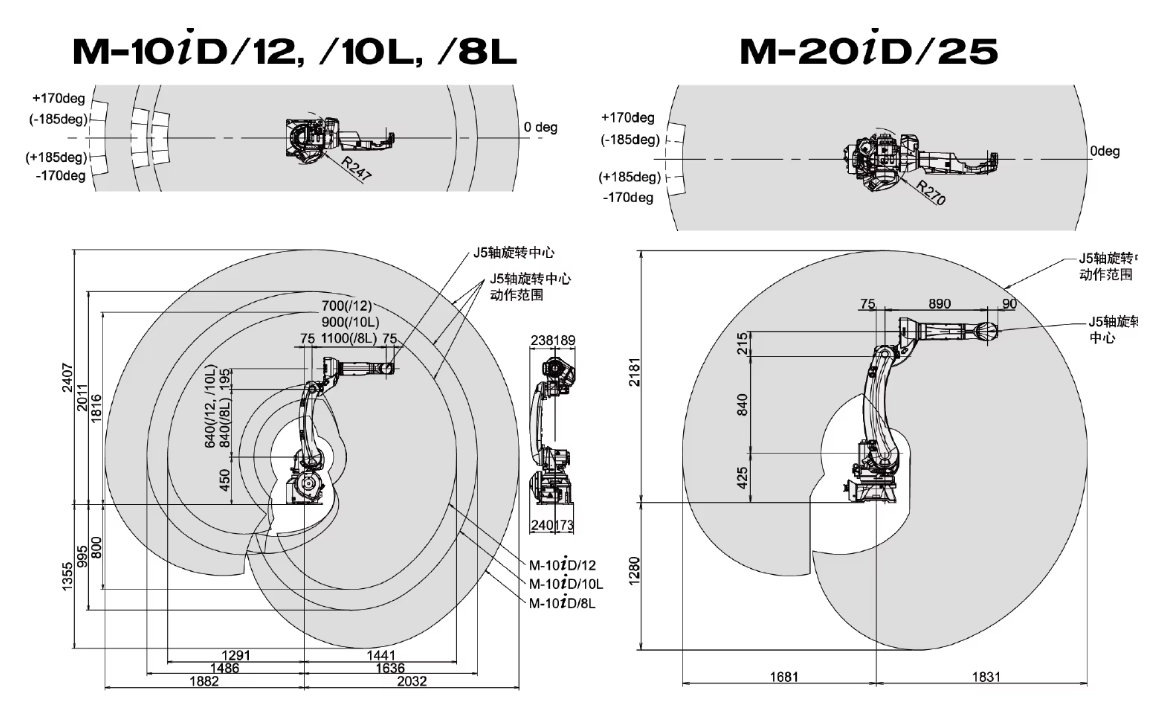
Kaynak robotu
Japonya'da üretilen FANUC welding robotu kullanılmaktadır. Belirli robot parametreleri şu şekildedir.
LDWEP-500 laser tracker
LDWEP-500, akıllı bir çizgi tarama kaynaklı birleme jeneratörü sensörüdür. Çizgi lazer taraması aracılığıyla birleştirme jeneratörünün kesit kontur bilgilerini elde eder ve robot veya birleştirme makinesini otomatik olarak tamamlamak için yönlendirir. Görüntü edinimi, işleme ve birleştirme jeneratörünü tanıma fonksiyonları, harici bir bilgisayar gereksinim duymadan sensörün içinde tamamlanır. Yüksek entegrasyona sahip olup sistemin genel donanım maliyetini düşürür. Ark ışığına ve sıçrama dayanıklı, zeka ile birleştirme jeneratörlerini tanır ve kullanımı kolaydır. Mükemmel bir yapıya sahip, kompakt boyutlu, yüksek erişilebilirlik ve zengin tipler sunar. Uygulama senaryosuna göre seçilebilir ve en uygun parametreler özel olarak tasarlanabilir.

Birleştirme Güç Kaynağı Demir Çelik Yapı Endüstriyel H Kiriş 6-9 Eksen Birleştirme Robot İstasyonu Çin
Megmeet CM500 kaynaklı birleme güç kaynağı kullanma: tamamen dijital bir endüstriyel ağır yüklü CO2/MAG/MMA akıllı birleme makinesi. Çeşitli karbon çeliği birleştirme işleme alanlarında yaygın olarak kullanılmaktadır: rayli taşıma, otomobil, gemi inşaatı, çelik yapı, konteyner, makine, donanım ve diğer sanayiler, ayrıca endüstriyel ağır yüklü ve sert koşullu ortamlarda çalışmaktadır.







