EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- Pangkalahatang-ideya
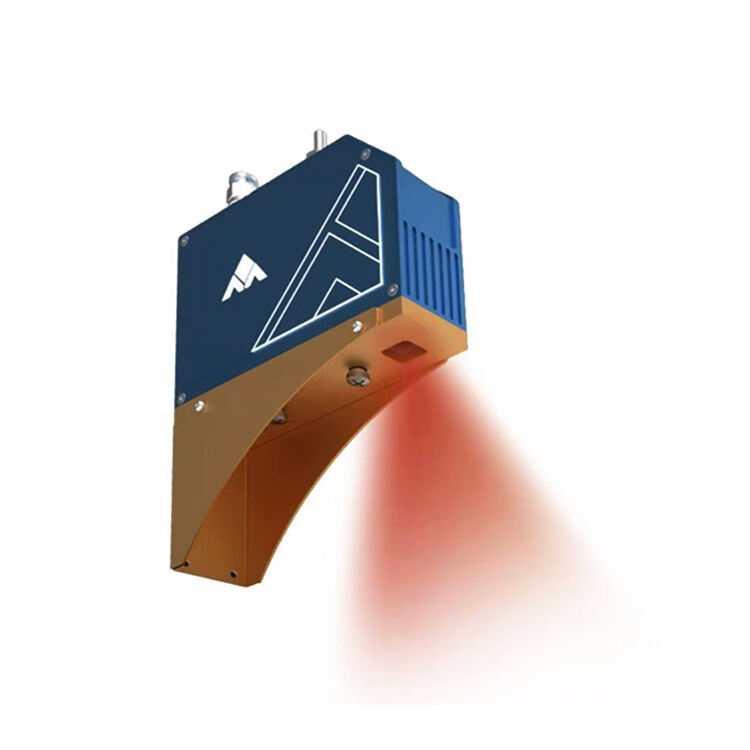
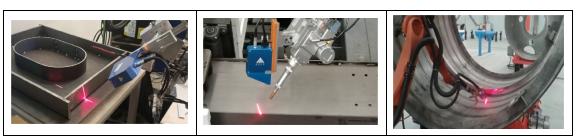
Gumagamit ang laser seam tracking sensor ng laser upang i-irradiate ang ibabaw ng weld seam upang makabuo ng laser light band, na natatanggap at kinukunan ng larawan ng isang high-definition na camera. Sa pamamagitan ng algorithmic processing, ang mga three-dimensional na feature ng weld seam ay binago sa structured na impormasyon, kabilang ang welding joint coordinates, misalignment, gaps, atbp. Ang impormasyong ito ay ipinapadala sa robot controller, na nagbibigay sa robot ng kinakailangang trajectory at mga parameter ng proseso para sa welding, paggabay sa robot na magwelding o magtama ng mga deviation ng workpieces sa real-time, at makamit ang perpektong welding. Kung ikukumpara sa iba pang mga solusyon, ang laser seam tracking ay may mga bentahe ng non-contact, mataas na katumpakan, mabilis na bilis, at mahusay na adaptability.

Ang sensor ay gumagamit ng linear structured light measurement, na may mabilis na line imaging speed, walang contact, at walang mekanikal na paggalaw; Malakas na kakayahang umangkop, na may kakayahang mag-output ng mga parameter ng welding seam; Ganap na naka-embed, na may panlabas na pang-industriya na kontrol na mga computer at maraming iba pang mga pakinabang, ito ay malawakang ginagamit sa iba't ibang uri ng automated welding. Anuman ang proseso ng welding, maaari kaming magbigay ng maaasahang suporta at matatag na pagganap upang matiyak ang mahusay na mga resulta sa iba't ibang mga senaryo ng welding.
Ang buong graphical na interface ng software, proseso ng setting ng parameter, mga detalye ng menu ng tulong, ang mga hindi propesyonal ay maaari ding mabilis na makapagsimula
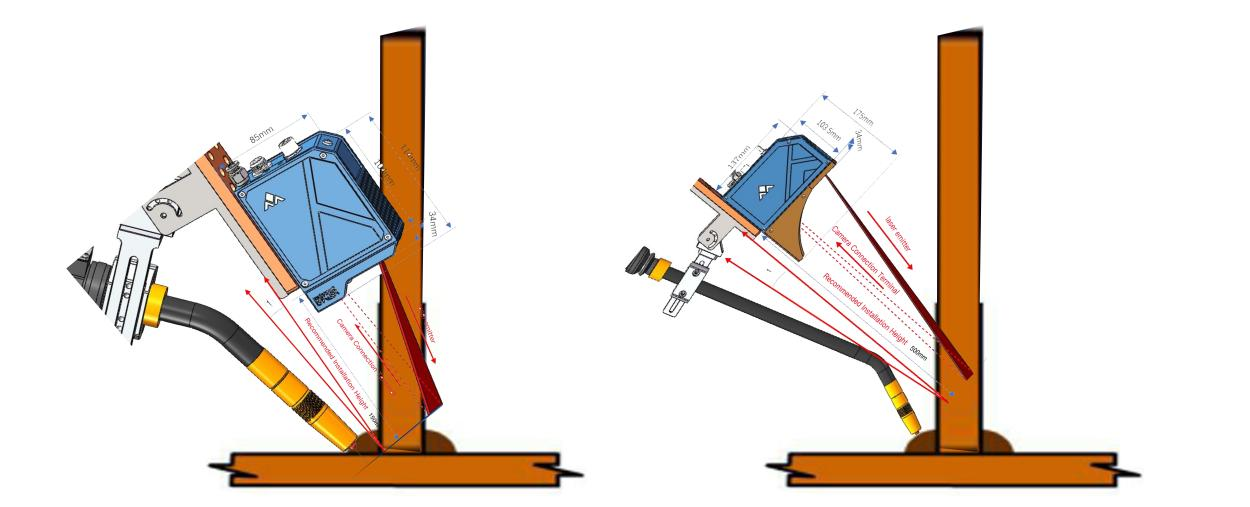
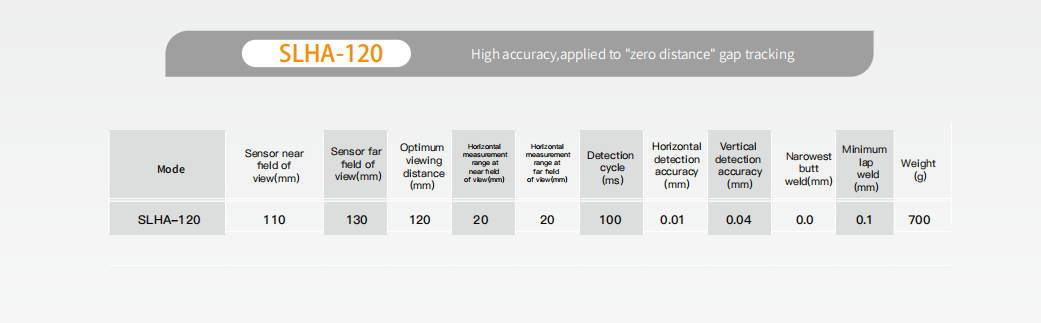
*Ang zero gap detection ay tumutukoy sa mga sensor na nilagyan ng function na ito, na magagamit upang matukoy ang mga gaps na mas mababa sa 0.1mm
*Ang distansya ng paningin ay para sa sanggunian lamang at maaaring iakma ayon sa mga partikular na pangangailangan ng user
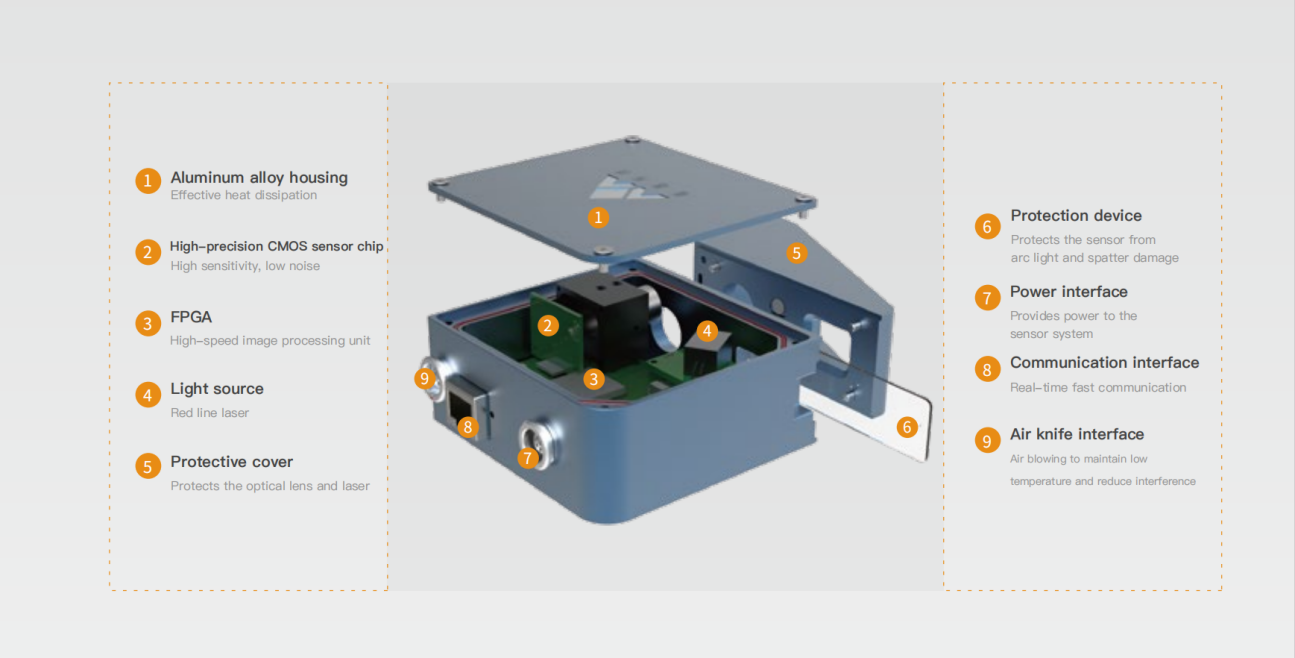
Ang sensor ay angkop para sa pinaka-hinihingi na mga application, dahil ito ay insensitive sa ligaw na liwanag, tubig at alikabok (IP67) at immune sa electromagnetic radiation (EMC).
Na may Makapangyarihang Function.
01. posisyon at pagwawasto ng paglihis
Ang pagpoposisyon at paglihis na pagwawasto function ay ginagamit para sa nababaluktot na mga senaryo ng welding ng iba't ibang mga workpiece na may parehong modelo ngunit hindi pare-pareho ang mga tolerance. Tinitiyak ng function na ito na walang manu-manong interbensyon ang kinakailangan kapag nagpapalit ng mga workpiece, at ang robot ay ginagabayan ng positioning at deviation correction system upang makamit ang tumpak na welding,
Two-Point positioning na angkop para sa straight line 2D offset welds.
Multi-Point Positioning Angkop para sa multi-segment 2d offset welds
Pagpoposisyon ng Segment Angkop para sa mga multi-segment na 3d offset welds.
02 Real-time na Pagsubaybay
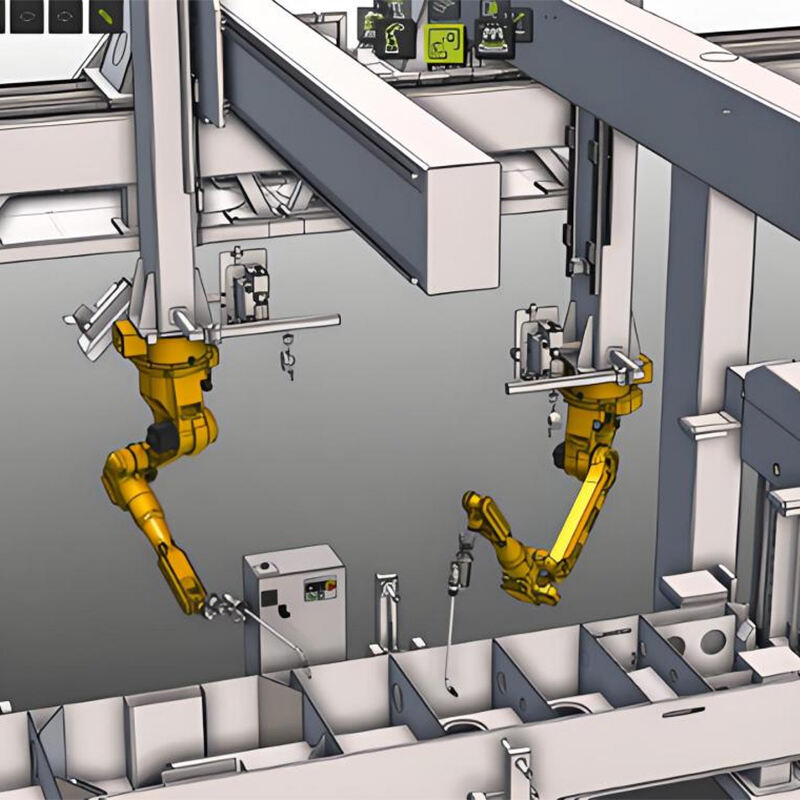
Ang real-time na function ng pagsubaybay ay ginagamit sa mga senaryo ng welding na nangangailangan ng mataas na kahusayan at walang spatial na interference. Ang sensor ay naayos na may kaugnayan sa welding torch, at ang welding torch ay awtomatikong inaayos ang welding path ayon sa 3D coordinate data.
03. Pag-scan at Awtomatikong hinang
Ang pag-scan at awtomatikong welding function ay nagbibigay-daan sa sensor na unang mangolekta ng geometric na impormasyon ng mga welds. Ang function na ito ay angkop para sa mataas na mapanimdim, makitid na mga puwang ng hinang at kumplikadong mga senaryo ng pag-welding.
Laser Seam Tracking
Maaaring makita ng Laser Seam Tracking ang mataas, mababa at kaliwa at kanang paglihis ng weld.
Maaaring makakita ng mga splicing welds na may maliliit na puwang.
Lutasin ang problema ng welding seam tracking para sa manipis na plate splicing.
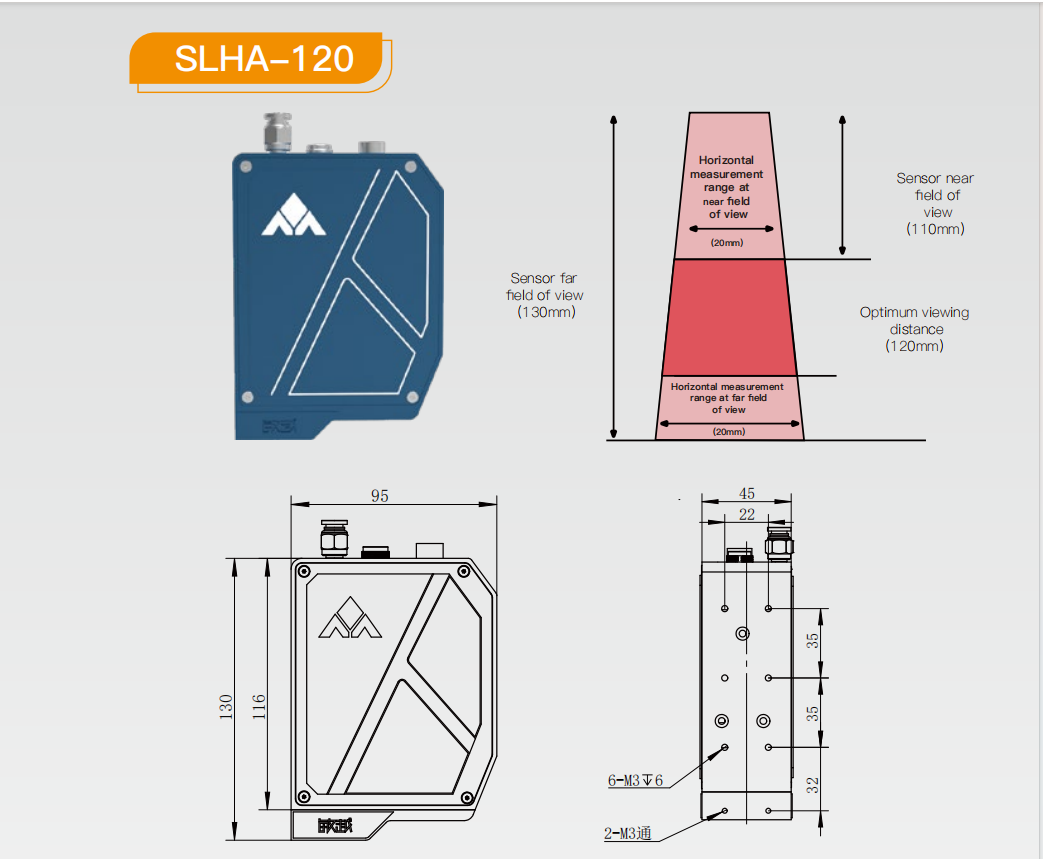
Ang pinakamainam na distansya ng pagmamasid ay tungkol sa 120 mm.
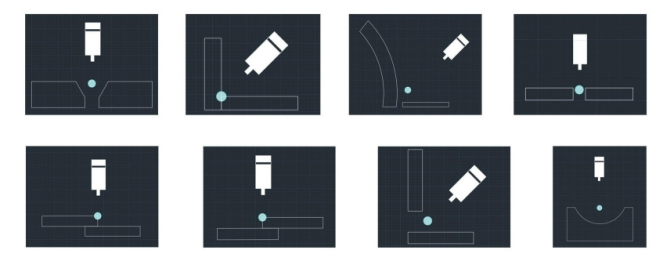
Suportahan ang uri ng hinang
V-groove weld
Fillet weld
Hemming weld
Pag-splicing weld
Mga lap welds, atbp.
Mataas na katumpakan, zero pitch welds. angkop para sa hindi kinakalawang na asero welded Industriya.
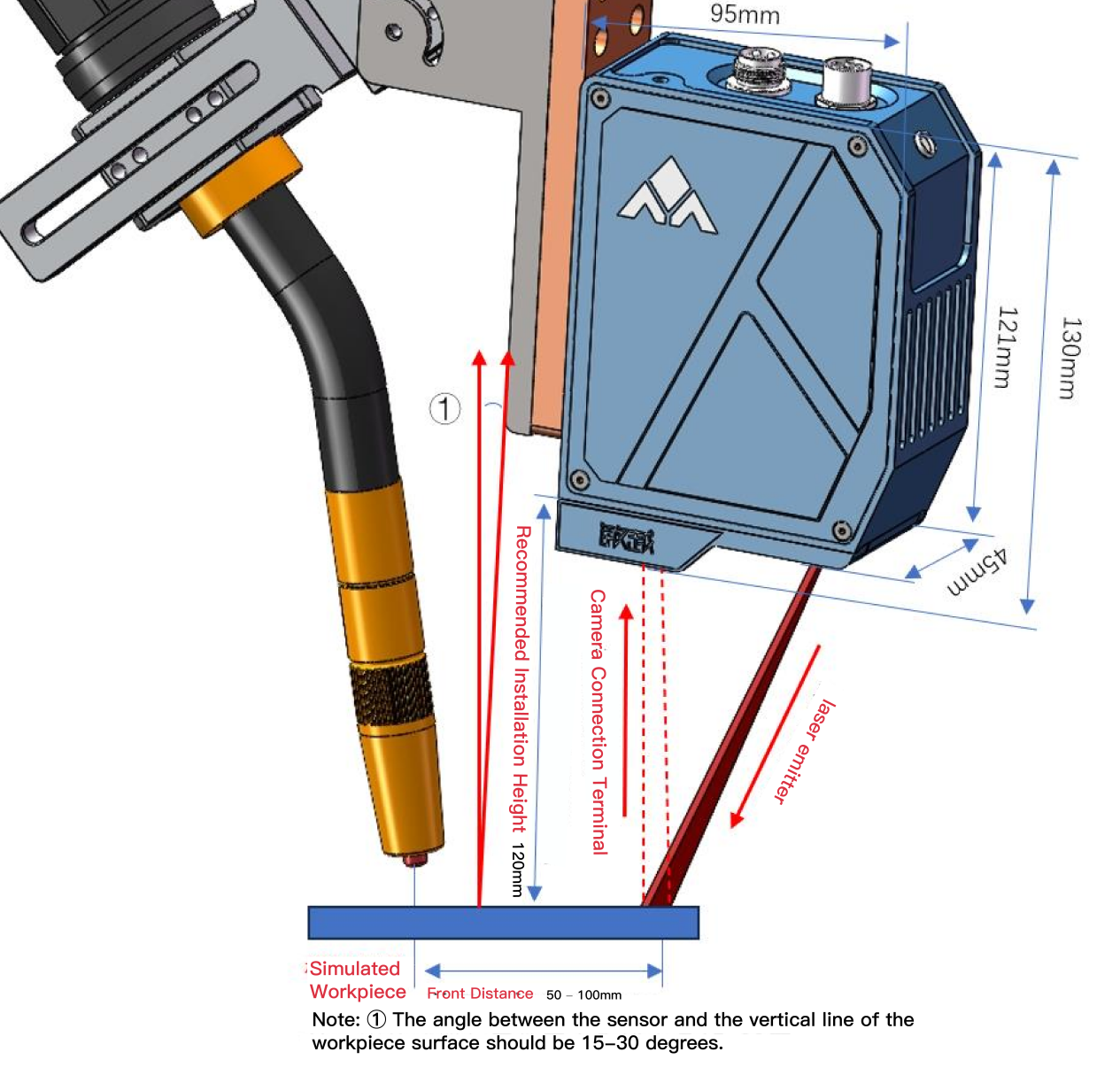
Mangyaring piliin ang uri ng makatwirang ayon sa aktwal na saklaw ng aplikasyon, upang maiwasan ang sensor ng banggaan ng workpiece, ang pag-load ng robot sa pangkalahatan ay karaniwang nangangailangan ng 20KG.