EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- ภาพรวมสินค้า
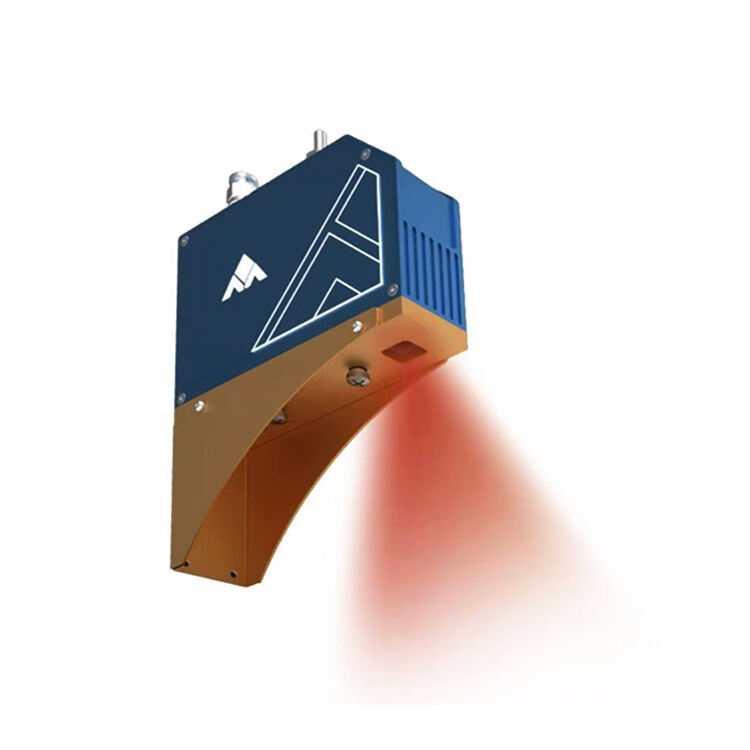
เซ็นเซอร์ติดตามรอยเชื่อมเลเซอร์ใช้เลเซอร์ฉายแสงบนพื้นผิวของรอยเชื่อมเพื่อสร้างแถบแสงเลเซอร์ ซึ่งรับและถ่ายภาพโดยกล้องความละเอียดสูง โดยการประมวลผลตามอัลกอริทึม คุณสมบัติสามมิติของรอยเชื่อมจะถูกแปลงเป็นข้อมูลที่มีโครงสร้าง รวมถึงพิกัดรอยเชื่อม การจัดตำแหน่งที่ไม่ถูกต้อง ช่องว่าง ฯลฯ ข้อมูลนี้จะถูกส่งไปยังตัวควบคุมหุ่นยนต์ โดยให้เส้นทางและพารามิเตอร์กระบวนการที่จำเป็นสำหรับการเชื่อมแก่หุ่นยนต์ นำทางหุ่นยนต์ในการเชื่อมหรือแก้ไขความเบี่ยงเบนของชิ้นงานแบบเรียลไทม์ และทำให้ได้งานเชื่อมที่สมบูรณ์แบบ เมื่อเปรียบเทียบกับโซลูชันอื่นๆ การติดตามรอยเชื่อมด้วยเลเซอร์มีข้อดีคือไม่ต้องสัมผัส ความแม่นยำสูง ความเร็วสูง และปรับตัวได้ดี

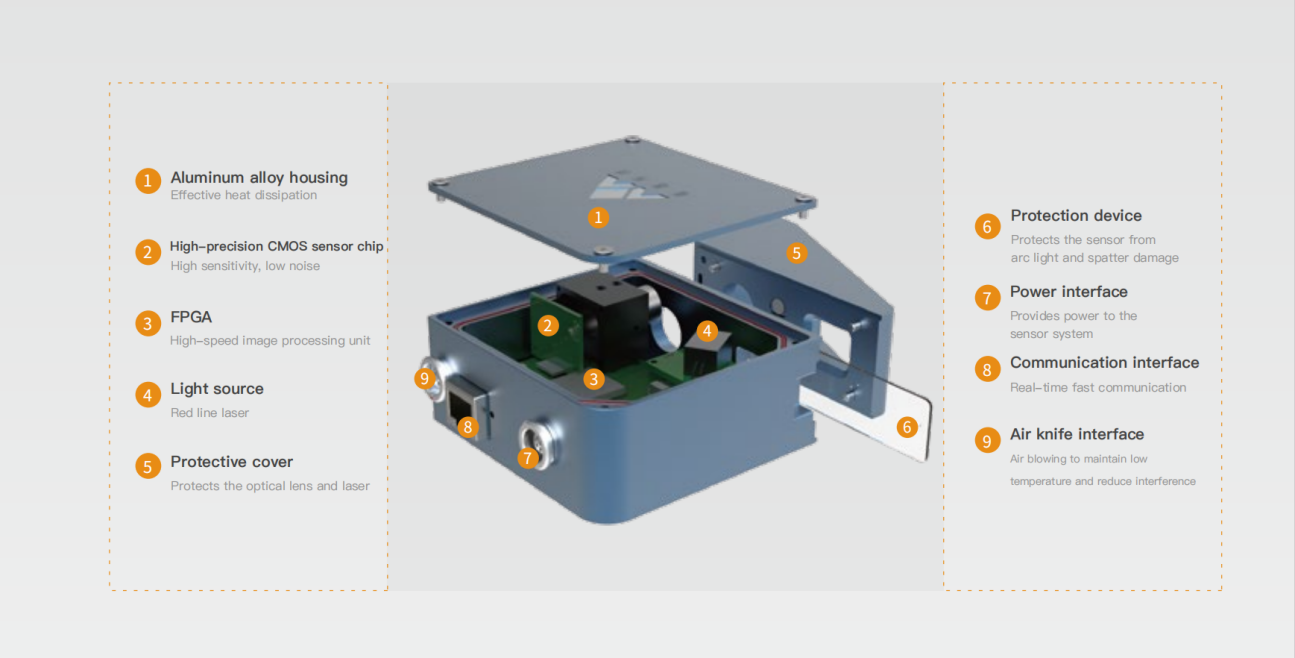
เซ็นเซอร์ใช้การวัดแสงแบบโครงสร้างเชิงเส้นซึ่งมีความเร็วในการถ่ายภาพเส้นตรงที่รวดเร็ว ไม่ต้องสัมผัส และไม่มีการเคลื่อนไหวทางกล ปรับตัวได้ดี สามารถส่งออกพารามิเตอร์ของตะเข็บเชื่อมได้ ฝังไว้ทั้งหมด พร้อมคอมพิวเตอร์ควบคุมอุตสาหกรรมภายนอกและข้อดีอื่นๆ อีกมากมาย จึงใช้กันอย่างแพร่หลายในการเชื่อมอัตโนมัติประเภทต่างๆ ไม่ว่ากระบวนการเชื่อมจะเป็นอย่างไร เราก็สามารถให้การสนับสนุนที่เชื่อถือได้และประสิทธิภาพที่เสถียรเพื่อให้แน่ใจว่าจะได้ผลลัพธ์ที่ยอดเยี่ยมในสถานการณ์การเชื่อมที่แตกต่างกัน
อินเทอร์เฟซซอฟต์แวร์กราฟิกเต็มรูปแบบ กระบวนการตั้งค่าพารามิเตอร์ รายละเอียดเมนูช่วยเหลือ ผู้ที่ไม่ใช่มืออาชีพก็สามารถเริ่มต้นได้อย่างรวดเร็ว
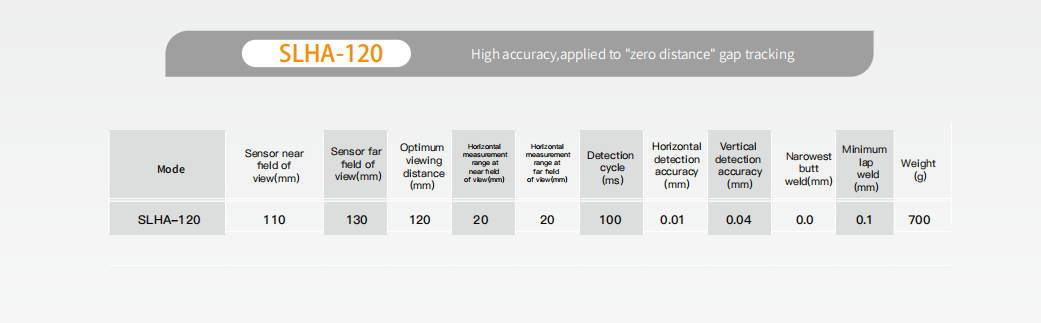
*การตรวจจับช่องว่างเป็นศูนย์หมายถึงเซ็นเซอร์ที่มีฟังก์ชั่นนี้ ซึ่งสามารถใช้ระบุช่องว่างที่ต่ำกว่า 0.1 มม. ได้
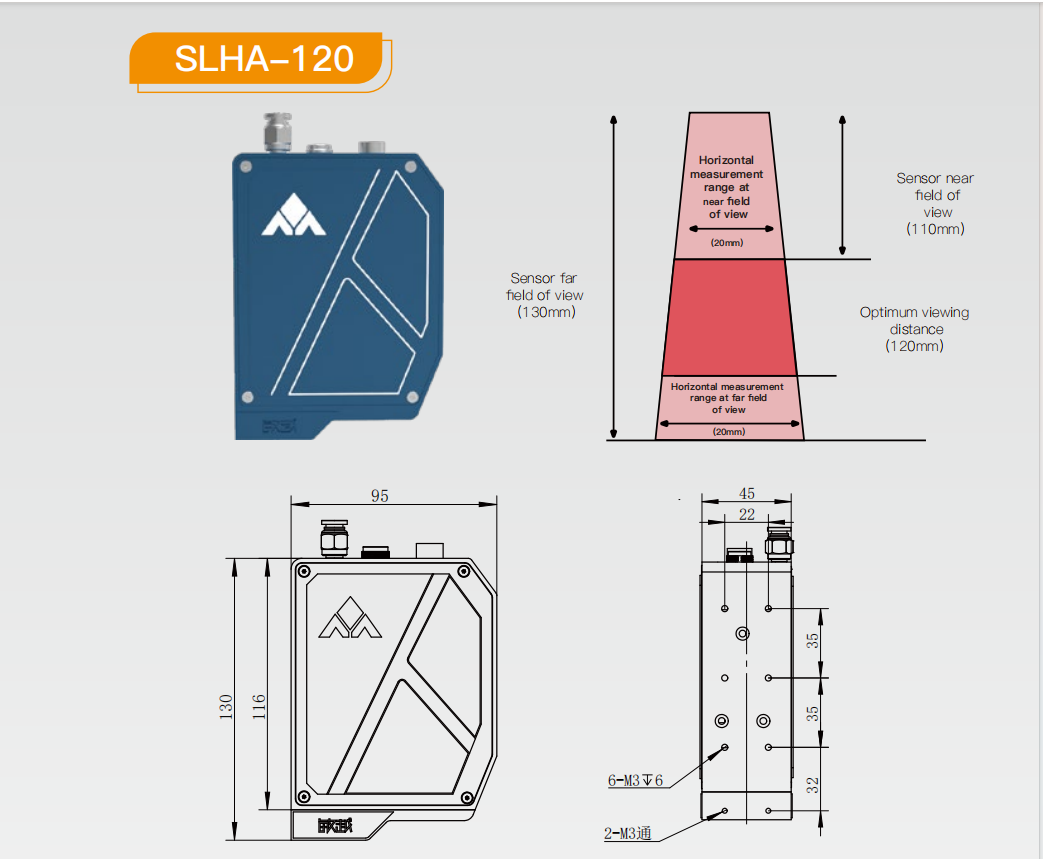
*ระยะการมองเห็นเป็นเพียงข้อมูลอ้างอิงเท่านั้น และสามารถปรับได้ตามความต้องการเฉพาะของผู้ใช้
เซ็นเซอร์นี้เหมาะสำหรับการใช้งานที่ต้องการความแม่นยำสูง เนื่องจากไม่ไวต่อแสงรบกวน น้ำ และฝุ่น (IP67) และไม่ไวต่อรังสีแม่เหล็กไฟฟ้า (EMC)
ด้วยฟังก์ชั่นอันทรงพลัง
01. การแก้ไขตำแหน่งและความเบี่ยงเบน
ฟังก์ชันการแก้ไขตำแหน่งและการเบี่ยงเบนใช้สำหรับสถานการณ์การเชื่อมแบบยืดหยุ่นของชิ้นงานที่แตกต่างกันโดยใช้แบบจำลองเดียวกันแต่มีค่าความคลาดเคลื่อนที่ไม่สม่ำเสมอ ฟังก์ชันนี้ช่วยให้มั่นใจว่าไม่จำเป็นต้องมีการแทรกแซงด้วยมือเมื่อสลับชิ้นงาน และหุ่นยนต์จะได้รับคำแนะนำจากระบบการแก้ไขตำแหน่งและการเบี่ยงเบนเพื่อให้เกิดการเชื่อมที่แม่นยำ
การวางตำแหน่งสองจุดเหมาะสำหรับการเชื่อมออฟเซ็ต 2D แบบเส้นตรง
การวางตำแหน่งหลายจุด เหมาะสำหรับการเชื่อมออฟเซ็ต 2 มิติหลายส่วน
การวางตำแหน่งส่วน เหมาะสำหรับการเชื่อมออฟเซ็ต 3 มิติแบบหลายส่วน
02 การติดตามแบบเรียลไทม์
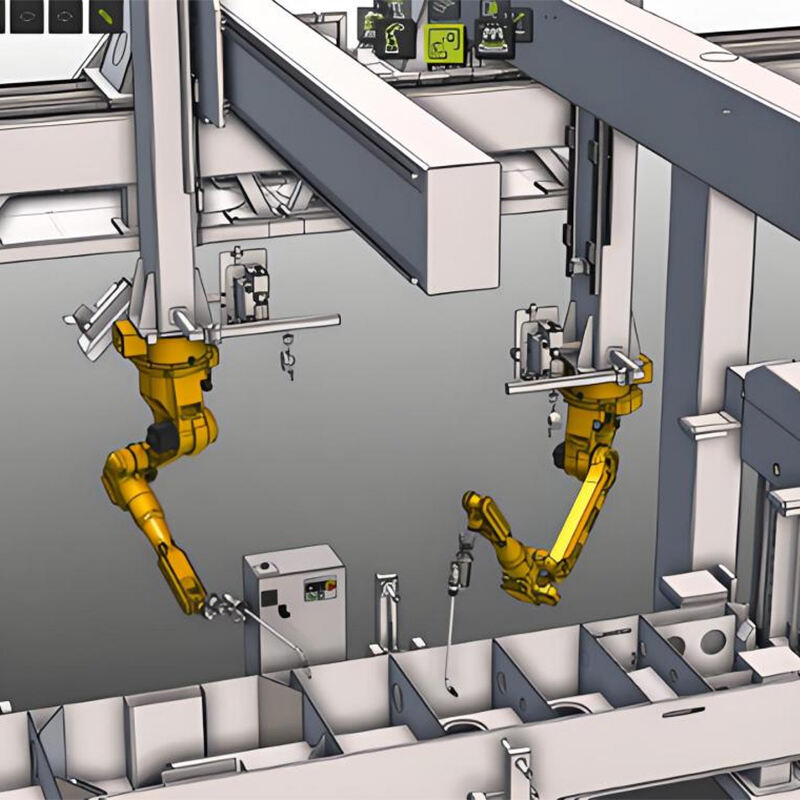
ฟังก์ชั่นการติดตามแบบเรียลไทม์ใช้ในสถานการณ์การเชื่อมที่ต้องการประสิทธิภาพสูงและไม่มีการรบกวนเชิงพื้นที่ เซ็นเซอร์จะยึดกับคบไฟเชื่อม และคบไฟเชื่อมจะปรับเส้นทางการเชื่อมตามข้อมูลพิกัด 3 มิติโดยอัตโนมัติ
03.การสแกนและการเชื่อมอัตโนมัติ
ฟังก์ชันการสแกนและการเชื่อมอัตโนมัติช่วยให้เซ็นเซอร์รวบรวมข้อมูลทางเรขาคณิตของรอยเชื่อมได้ก่อน ฟังก์ชันนี้เหมาะสำหรับพื้นที่เชื่อมที่แคบและสะท้อนแสงสูง รวมถึงสถานการณ์การเชื่อมที่ซับซ้อน
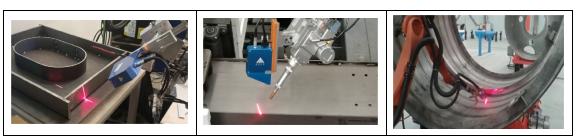
การติดตามตะเข็บด้วยเลเซอร์
การติดตามตะเข็บด้วยเลเซอร์สามารถตรวจจับความเบี่ยงเบนของรอยเชื่อมสูง ต่ำ และซ้ายและขวาได้
สามารถตรวจจับรอยเชื่อมแบบต่อที่มีช่องว่างเล็กๆ ได้
แก้ไขปัญหาการติดตามรอยตะเข็บเชื่อมสำหรับการต่อแผ่นบาง
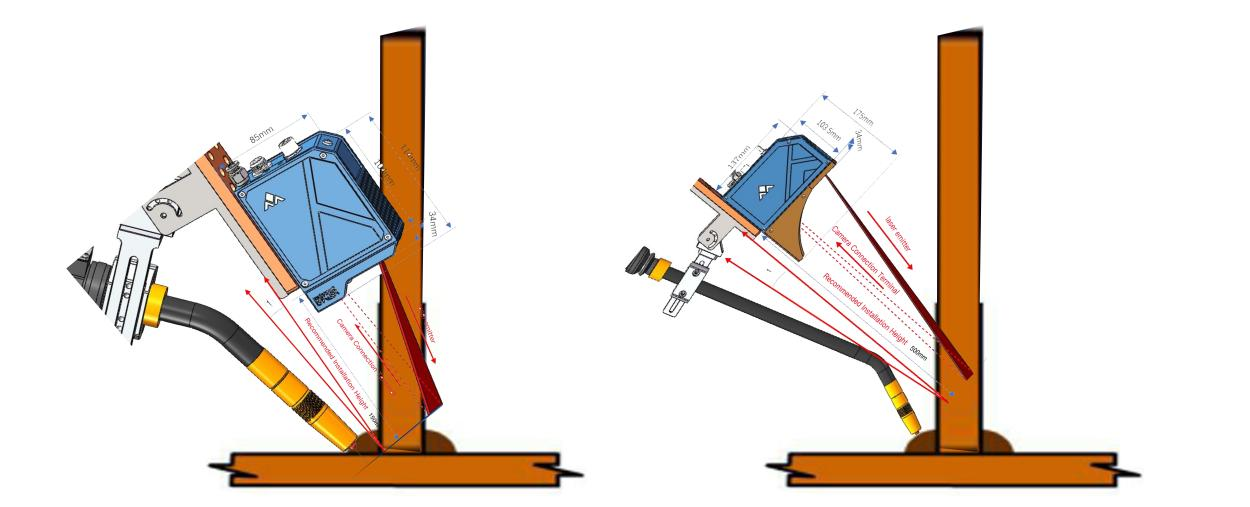
ระยะการสังเกตที่เหมาะสมคือประมาณ 120 มม.
ประเภทการเชื่อมรองรับ
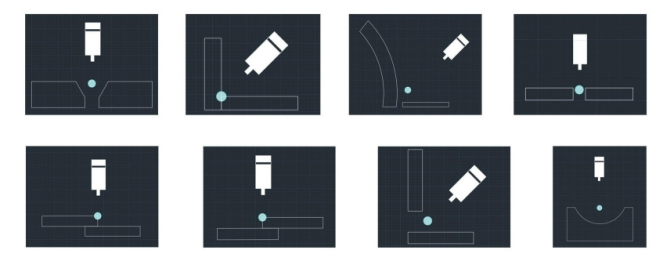
การเชื่อมร่องวี
เนื้อเชื่อม
การเชื่อมขอบ
การเชื่อมแบบต่อ
การเชื่อมทับ ฯลฯ
การเชื่อมที่มีความแม่นยำสูง ระยะพิทช์ศูนย์ เหมาะสำหรับอุตสาหกรรมการเชื่อมสแตนเลส
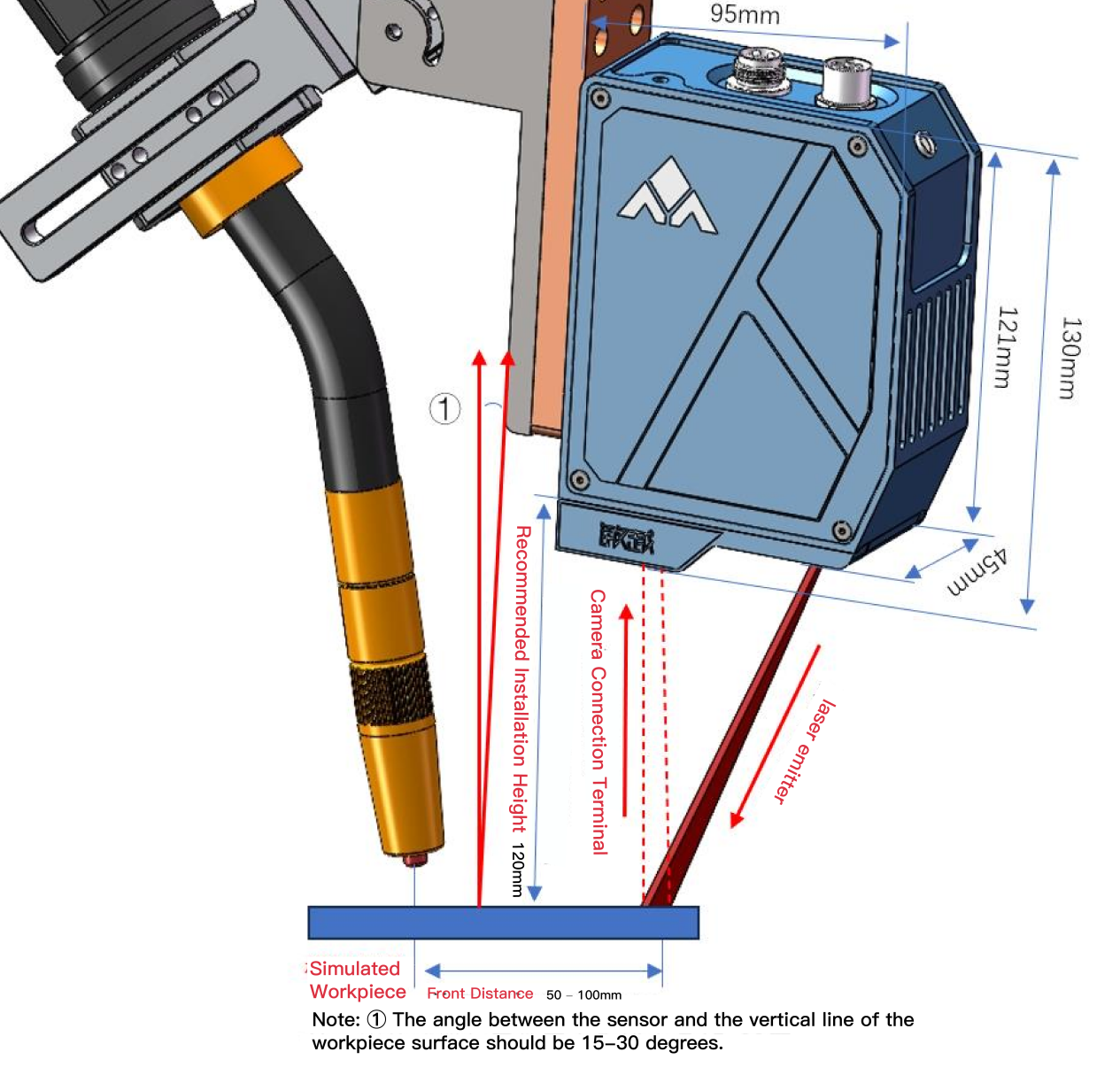
โปรดเลือกประเภทอย่างเหมาะสมตามขอบเขตการใช้งานจริง เพื่อหลีกเลี่ยงเซ็นเซอร์การชนชิ้นงาน โดยทั่วไปแล้ว หุ่นยนต์จะต้องรับน้ำหนักที่ 20 กก.