 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



LDWM Laser senzor praćenja jahizne
Sa funkcijama pronađenja pozicije, stvarno-vremenskog praćenja, skeniranja i automatske svarenje
- Pregled
- Podržani robot brand
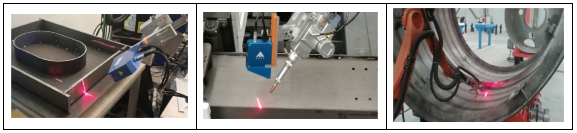
Senzor za praćenje vretnih jazova koristi laser da osvetli površinu vretnog jaza i formira laserovu svetlosnu traku, koja se prihvata i slikaju high-definition kamerom. Putem algoritamske obrade, trodimenzionalne karakteristike vretnog jaza transformišu se u struktuirane informacije, uključujući koordinate spajnih veza, pomake, razmake itd. Ove informacije se šalju kontroleru robota, pružajući robotu potrebne trajektorije i procesne parametre za vretenje, što vodi robota da izvrši vretenje ili ispravi odstupanja radnog dela u stvarnom vremenu, postižući savršeno vretenje. U poređenju sa drugim rešenjima, praćenje vretnih jazova lasrom ima prednosti ne-kontaktne metode, visoke tačnosti, brze brzine i dobre prilagodljivosti.
Senzor koristi linearno strukturirano svetlo za merenje, što omogućava brzu linijnu sliku, bez kontakta i bez mehaničkog kretanja; Moćna prilagodljivost, sposobna da izbaci parametre za svarivanje; Potpuno ugrađeno, sa spoljnim industrijskim računarskim sistemima i mnogim drugim prednostima, široko se koristi u različitim vrstama automatskog svarivanja. Bez obzira na postupak svarivanja, možemo pružiti pouzdanu podršku i stabilnu performansu kako bismo osigurali odlične rezultate u različitim scenarijima svarivanja.
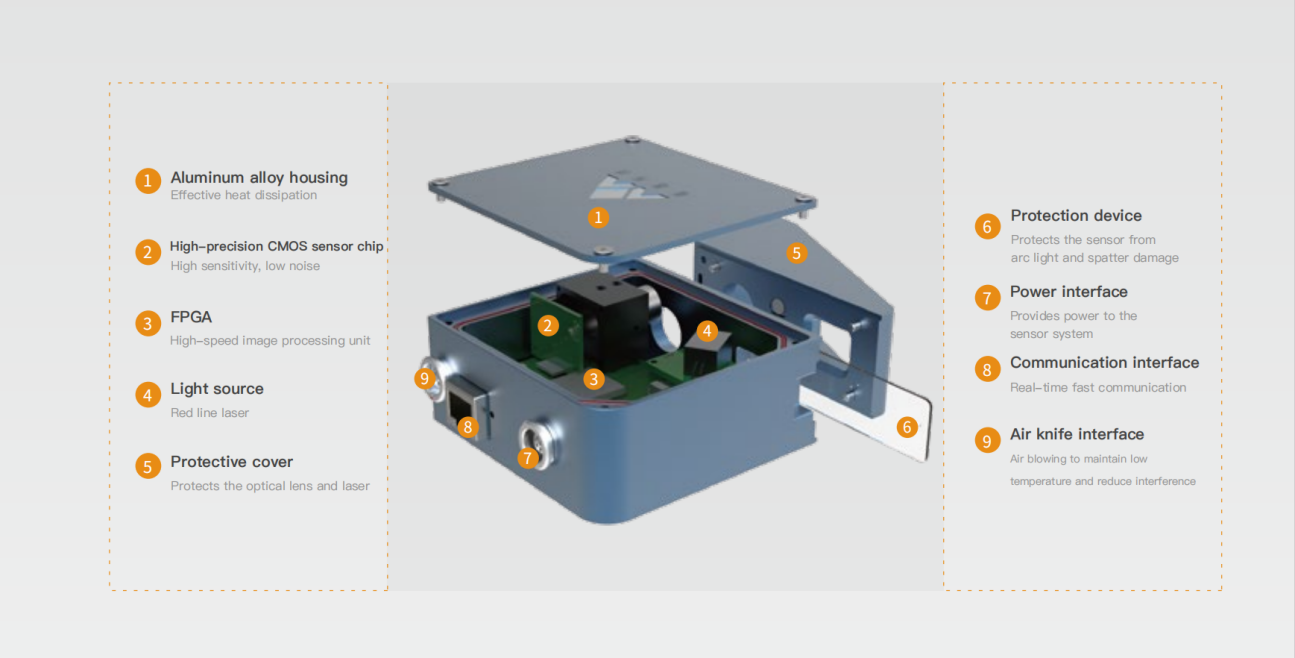
Senzor je odgovarajući za najzahtevnije primene, jer je neosetljiv na strane svetlosti, vodu i prah (IP67) i imun na elektromagnetsku radijaciju (EMC).
Sa Moćnom Funkcijom.
01. korekcija pozicije i odstupanja
Funkcija korekcije pozicije i odstupanja se koristi za fleksibilne scenarije svarivanja različitih radnih delova istog modela ali sa neusaglašenim tolerancijama. Ova funkcija osigurava da pri prelasku na druge radne delove nije potrebno ručno zasaganje, a robot je vodjen sistemom za korekciju pozicije i odstupanja kako bi se postigla precizna svarivanja.
Pozicioniranje u dve tačke koje je pogodno za ravne linije 2D pomeračnih svarivanja.
Višetaktne pozicioniranje Odgovara za više-segmentne 2D pomake pri spajanju
Pozicioniranje segmenta Odgovara za više-segmentna 3D pomaka pri spajanju.
02 Stvarno-vremenski praćenje
Funkcija stvarno-vremenskog praćenja koristi se u scenarijima spajanja koji zahtevaju visoku efikasnost i bez prostorne interferencije. Senzor je fiksiran u odnosu na spavački flamer, a spavački flamer automatski prilagođava putanju spajanja prema 3D koordinatnim podacima.
03. Skeniranje i automatsko spajanje
Funkcija skeniranja i automatskog spajanja omogućava senzoru da prvo sakupi geometrijske informacije o spojevima. Ova funkcija je odgovarajuća za visoko reflektivne, uske prostore za spajanje i kompleksne scenarije spajanja.
Laser praćenje spojeva
Laser praćenje spojeva može detektovati devijacije spojeva gore, dole, levo i desno.
Može detektovati spojeve sa malim razmacima.
Rešava problem praćenja spojeva za tankoplancno spajanje.
Optimalna udaljenost promatranja iznosi oko 300 mm.
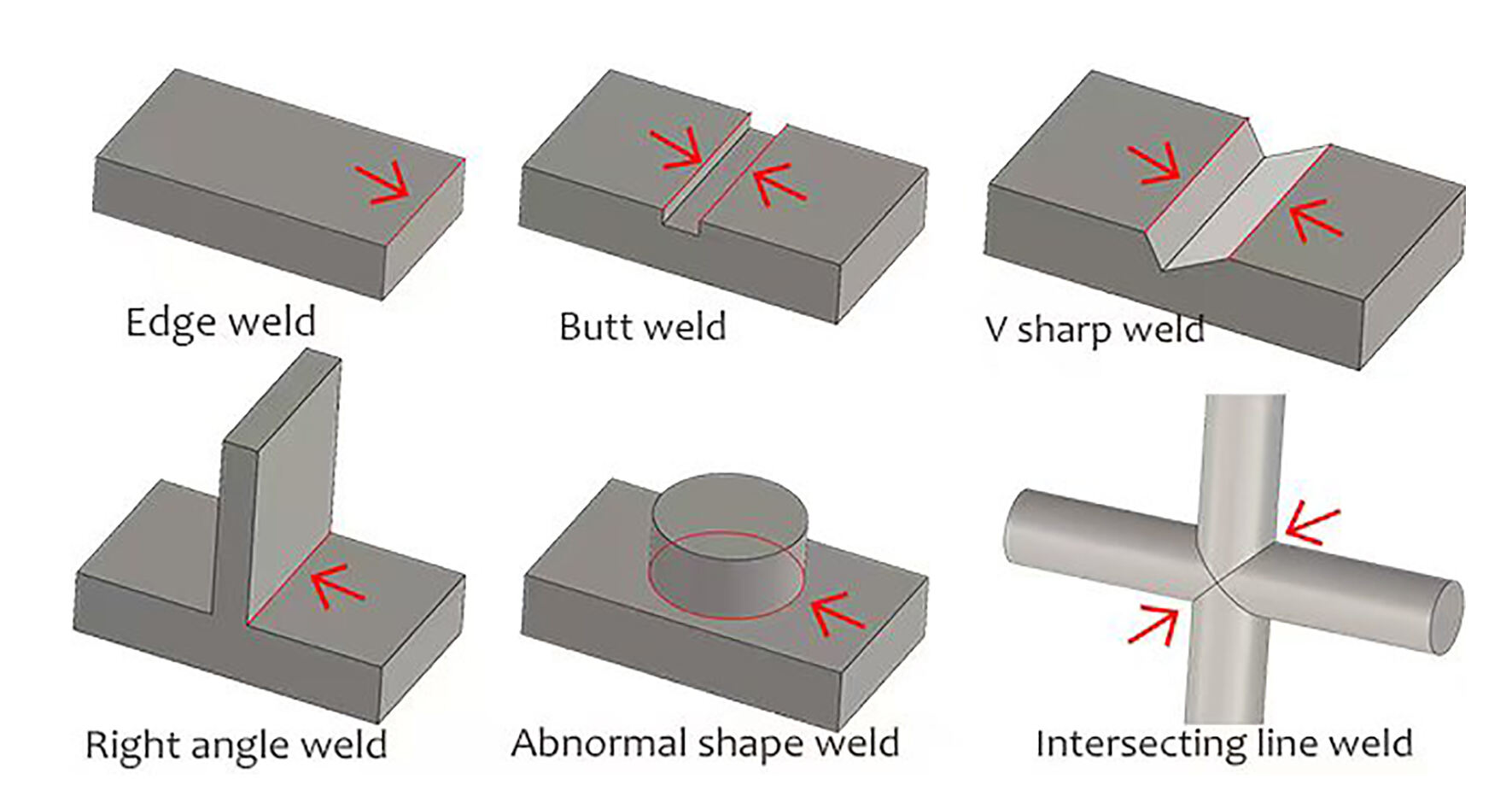
Vrsta spajanja za podršku
Spajanje V-oblika
Klape spajanje
Spajanje heminga
Spajanje šavicama
Spajanja na preklapanje itd.
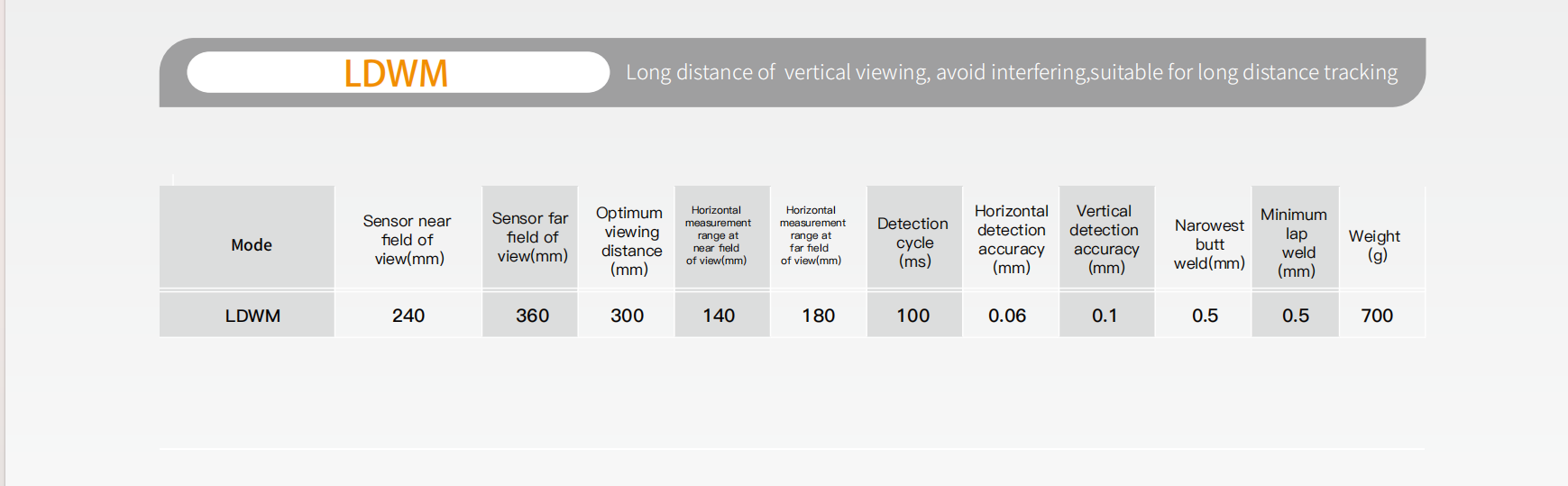
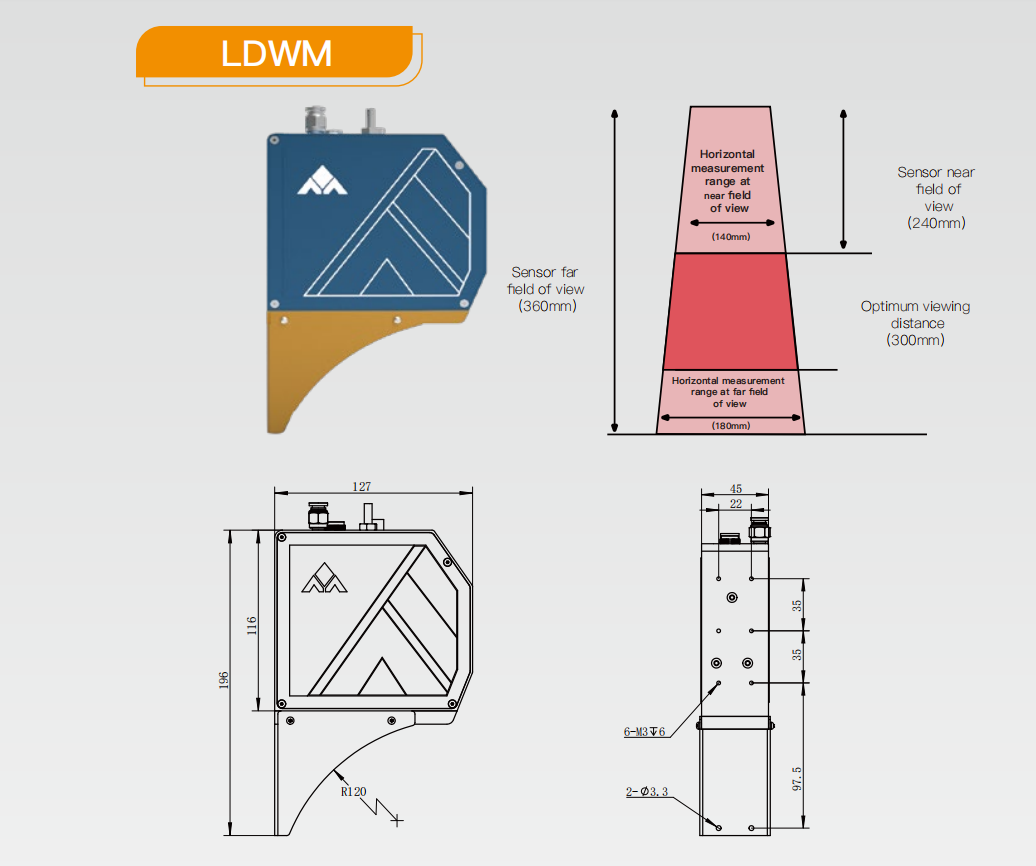
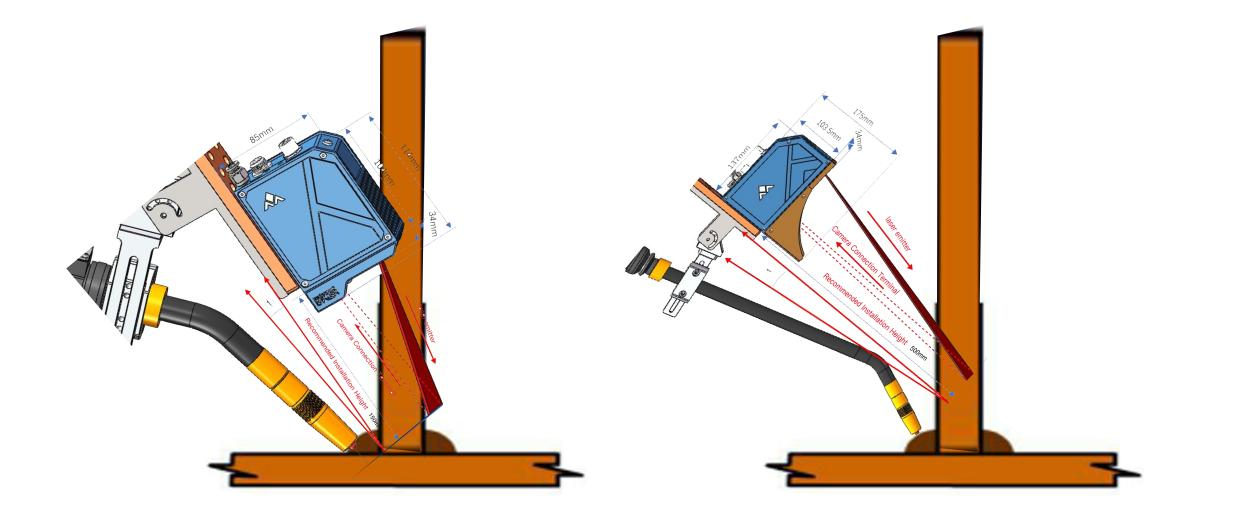
Duga udaljenost vertikalnog gledanja, širok pregled, izbjegavanje interferencije, pogodno za čelikarsku industriju i industriju građevinskog mašinstva. 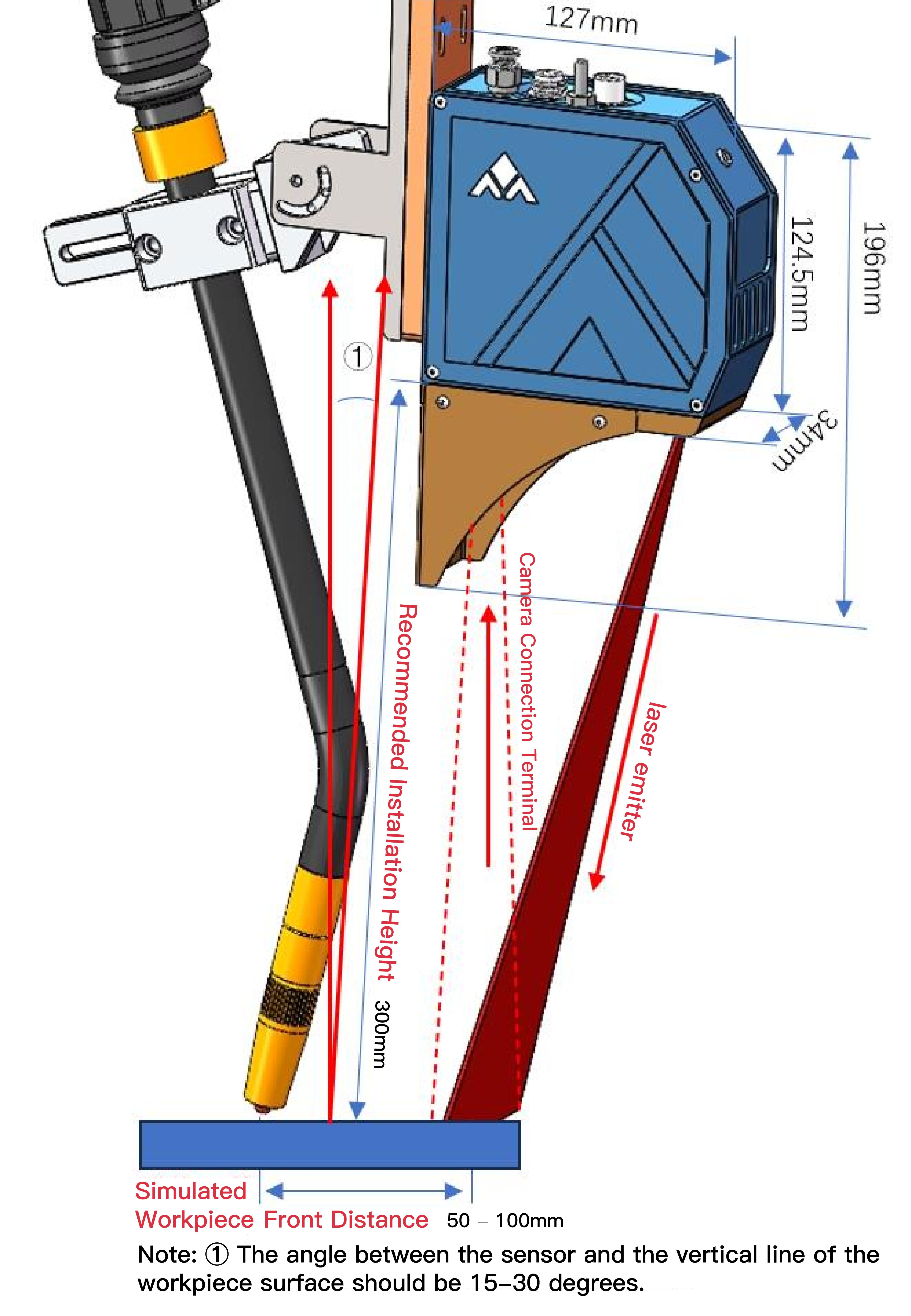
Molimo izaberite vrstu razumno prema stvarnom opsegu primene, da biste izbegli sudaranje delova sa senzorom; obično je opterećenje robota koje je potrebno 20KG.
Saradnički partner

Podržani robot brand







