Za šta se laser senzori koriste u merenju rastojanja i detekciji objekata? Oni koriste laserove, koji su kao nevidljive vodice koje mogu precizno mjeriti stvari. Dakle, koristeći laser senzore, sada znamo koliko je daleko objekat od nas - idealno, oni ne moraju da dodiruju ili koriste običnu meracku traku. Kako zapravo radi laser senzor? Zraka se vraća senzoru kada udari u objekat. Tada laserski senzor za merenje distance koliko dugo je zrak trajao da se vrati. To nam govori koliko je daleko objekat. To je nešto slično tome kako letci koriste eholokaciju za navigaciju u tamnuri. Letci izdaju zvukove, i kada se zvukovi vrate, oni znaju gde su okolni objekti. Laser senzori postižu nešto sasvim slično, međutim oni se oslanjaju na svetlo umesto na zvuk!
Kada izrađujete nešto u fabrikama, gde se mnogo stvari proizvodi, izuzetno je važno biti vrlo tačan. Ako mašine ne seku i ne stavljaju stvari tačno gde treba, to vodi do problema. Zadatak laser senzora jeste da osiguraju da mašine seku i pomeraju delove na pravom mestu. Takva tačna čitanja omogućavaju da se stvari kreiraju efikasnije i tačnije, što je ključno u sektorima gde čak i male greške mogu biti skupih. Fabrike koriste ласерски сензор велике брзине da bi napravile tačne proizvode i smanjile otpad.

Za merenje rastojanja, kao što je dužina hodnika ili visina zgrade, koristimo industrijski laser senzor . One su mnogo tačnije od standardnih merilaca. Možemo brzo i lako mjeriti duga rastojanja pomoću laser senzora. To takođe štedi mnogo vremena i problema na radnom mestu, gde nam teške merne uređaje mogu da seku rad onima koji pokušavaju da obave svoj posao. Laser senzori imaju visoku tačnost, što nam omogućava da verujemo u mere koje pružaju, čime postaju vrlo rasprostranjene u različitim situacijama.

Zbog toga su roboti neverovatni, mogu da rade stvari koje mi ne možemo. Na primer, mogu da idu u oblasti koje su previše opasne za ljude. Laser senzori dozvoljavaju robotima da "vide" šta ih okružuje, kako ne bi se sudarili sa predmetima ili ljudima. Ovo je ključna sposobnost za osiguravanje sigurnosti među grupama pacijenata. Ako robot ima laser senzorska kamera u svom sistemu, znači da vjerojatno može da hoda bez kolizije sa predmetom. To omogućava robotima da saradjuju sa ljudima u fabrikama, skladištima, čak i u bolnicama, čime postaju vrlo korisni u različitim ulogama.
Laser senzori se koriste na toliko inovativnih načina da ih čak i ne možemo uzeti u obzir. Na primer, omogućavaju samoodržnim automobilima da vide druge vozila i izbegnu prometne nesreće. Senzori omogućavaju automobilima da osete koliko su druga vozila blizu - tako da mogu da donesu sigurne odluke prilikom vožnje. Koriste se i u zdravstvenoj zaštiti za praćenje životnih funkcija pacijenata bez da ih dodiruju. To može biti posebno korisno prilikom upravljanja pacijentima koji mogu biti u osjetljivim uslovima ili zahtijevati zaštitu od patogenih činilaca.
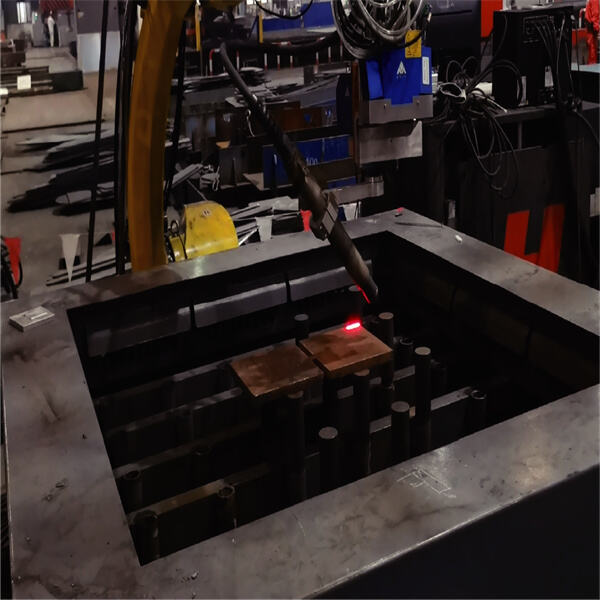
Primena funkcije pronađe i pratiti, skeniranje svarkivog ševa, potvrda pozicije i informacija o ševu, ispravljanje pozicije ševa između 3D digitalnog modela crteža i stvarnog delatnog dela, te rešavanje problema pomaka ševa zbog grešaka ulaznih materijala i toplinske deformacije.
Beijing Minyue Technology Co.,LTD, kao vodeće visokotehnološko preduzeće na svetu u oblasti ne-naučnog inteligentnog primenjivanja industrijskih robota. Specijalizujemo se na fleksibilno inteligentno proizvodnju uz pomoć našeg samorazvijenog RobotSmart - Sistema Inteligentnog Donošenja Odluka, SmartVision - Sistema Binokularne Strukturne Svetske Vizije, i SmartEye - Laserovog Sistema Prateća Zavišnih Ševa. Ponuditi novu generaciju inteligentnih rešenja za svarenje i reza robota.
Brzo, tačno, potpuno Bezu-Programiranja, visoka efikasnost i preciznost. Rešava složeni proces naučenja tradicionalnih robota i štedi vreme zaustavljanja prilikom naučenja.
Omogućava moćan svarenjački robot sa naprednim učitavanjem, bočnim učitavanjem, inverznim učitavanjem, montažom na mostu, inteligentnim planiranjem trajektorije za više robota, više vanjskih osa i pozicionera za suradničku radnju. Realizuje simulaciju kretanja robota, detekciju sudara, izbjegavanje singularnosti i detekciju granica ose.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








