Это означает, что датчики критически важны для робот ИИ . Они как бы глаза и уши роботов. Как наши глаза позволяют нам видеть, как наши уши позволяют нам слышать, так и датчики позволяют роботам видеть и понимать окружающую среду. Роботы также могут изучать свою среду с помощью различных датчиков. Они могут определять такие вещи, как движение, звук, прикосновение и даже расстояние до объектов. Датчики играют ключевую роль, так как они позволяют роботам безопасно перемещаться, принимать решения и взаимодействовать с окружающей средой.
В робототехнике датчики MINYUE являются неотъемлемой частью работы роботов и используются для выполнения заданных задач. Датчики предоставляют роботам необходимую информацию для точного и эффективного выполнения их работы. Без датчиков роботы практически не смогли бы обнаруживать объекты на своем пути, избегать столкновений и даже следовать указаниям, данным людьми. Датчики: Вы можете рассматривать датчики как мозг роботов, так как они играют важную роль в том, как роботы воспринимают окружающую среду и реагируют на нее.
Датчики прикосновения: датчики прикосновения предоставляют роботам возможность ощущать и взаимодействовать с объектами в их окружении. Когда робот сталкивается с объектом, он полагается на датчик прикосновения, чтобы узнать, что он встретил, что позволяет ему адекватно реагировать.
Автономные роботы MINYUE — это роботы, которые могут работать независимо без значительного вмешательства человека. Функционирование этих роботов основано на большом количестве датчиков, таких как лазерный световой датчик которые используются для наблюдения за окружающей средой и облегчения выполнения задач автономно. Сначала давайте рассмотрим некоторые ключевые компоненты автономных роботов:
Этот роботы с искусственным интеллектом расширять свои возможности и выполнять задачи более эффективно с использованием различных датчиков. Простой пример: датчики света могут помочь роботам находить источник света и следовать за ним. Это означает, что если свет включен, робот может к нему приблизиться. Датчики слуха: роботы могут реагировать на голосовые команды. Датчик звука позволяет роботу знать, что человек говорит, когда он разговаривает.
Существуют тактильные датчики MINYUE и лазерный датчик что предоставляют роботам возможность взаимодействия с окружающими объектами. Например, если робот касается стены, тактильный датчик сообщает роботу остановиться. Светофоры регулируют движение транспортных средств на дороге. Они также могут измерять расстояние до объекта, чтобы робот мог безопасно перемещаться, не сталкиваясь ни с чем.

Из вышесказанного видно, что датчики являются ключевыми компонентами робототехники. Они позволяют роботам ощущать и взаимодействовать с окружающей средой. Понимание различных типов датчиков и их уникальной роли в общей картине робототехники поможет нам оценить вклад этих маленьких компонентов в будущее технологий робототехники.
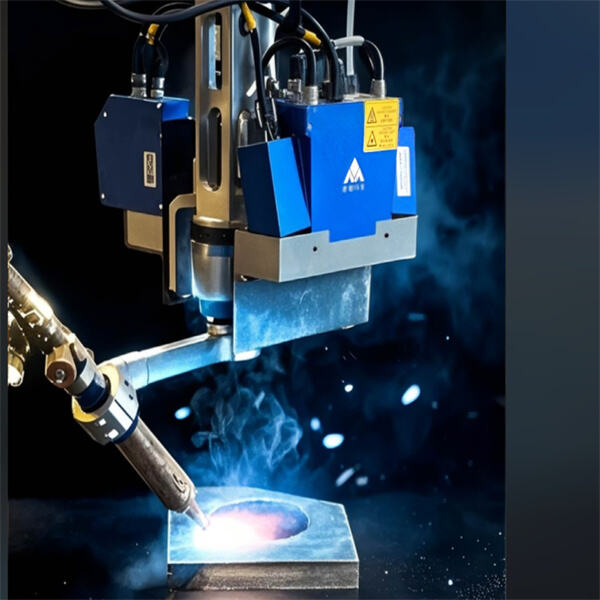
Использование функций поиска и отслеживания, сканирования сварочного шва, подтверждения положения и информации о сварочном шве, корректировки положения шва между 3D цифровой моделью и реальной деталью, а также решение проблемы смещения шва из-за ошибок входных материалов и термической деформации.
Быстро, точно,完全没有 программирования, высокая эффективность и точность. Это решает сложный процесс обучения традиционных роботов и экономит время простоя во время обучения.
Компания Beijing Minyue Technology Co.,LTD, как ведущее высокотехнологичное предприятие в области непрограммируемого интеллектуального применения промышленных роботов. Мы специализируемся на гибком интеллектуальном производстве с нашими собственными разработками: RobotSmart - Система Интеллектуального Принятия Решений, SmartVision - Система Визуализации Структурного Света с Двумя Камерами, и SmartEye - Лазерная Система Отслеживания Швов. Предлагаем новое поколение интеллектуальных решений для сварки и резки роботов.
Предоставляется мощный сварочный робот с передней загрузкой, боковой загрузкой, нижней загрузкой, установкой на ганtries, интеллектуальным планированием траектории для нескольких роботов, множества внешних осей и позиционера для совместной работы. Реализуется симуляция движения робота, обнаружение столкновений, избегание сингулярности и детекция ограничений осей.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








