 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Grond Rail Type Intelligent Lasrobotstation voor staalkonstrukties

De grondrailtype schuifrobot is uitgerust met een intelligente Friendess non-teching-schuweldsysteem en een grote visuele afstandsspleetvolger. Het kan direct 3D-modelfiles van Tekla, SolidWorks of UG importeren, de schuwelprocesparameters direct koppelen, de nauwkeurige schuwelpositie automatisch identificeren en het beste geoptimaliseerde schuwelproces genereren voor schuwelen.
De grondrailtype loopas verhoogt de aanpassingsvatbaarheid in lengterichting. De robot kan gekoppeld worden aan de grondrail om een langere naden in één keer te schuwen, en het werkstation kan aan beide zijden van de rail werken. Het wordt voornamelijk gebruikt voor het schuwen van H-profiel ribplaten, kolomvoetplaten, spoordragersteunplaten, consoles en andere structuren.
| Robot | 1 set Fanuc robot |
| Optionele schuwelmachine | Aotai schuwelmachine en bijbehorende accessoires of Megmeet schuwelmachine en bijbehorende accessoires |
| Systemen voor het lassen | MINYUE onderwijsvrije offline programmeringsschuwelsoftware, MINYUE laserschuwelvolgsysteem. |
| Toepasbare scenario's | Geschikt voor kokerplaten, korbelelementen, kleine constructiedelen, enz. Het kan momenteel worden gebruikt in H-vormige hoofd- en nevenbalken van staalconstructies, kleine en middelgrote plaatsegmenten van schepenbruggen, apparatuur H-vormige staalkolommen, apparatuurplatformbalken en andere structuren. |
| Schoonmaak systeem voor wapens | SC220A schoonmaak systeem voor wapens |
| Lengte grondrail | 6 meter (optioneel volgens de gebruiker) |
Systeem voor het reinigen van wapens
De SC220A schoonmaakstation voor wapens is een apparaat om robotweldwapens te reinigen. Het wordt gebruikt om automatisch de weldslib van het wapen tijdens robotwelding te verwijderen, automatisch draden af te knippen, en het wapenmondstuk en contactpunt te beschermen, waardoor de levensduur van het wapen verlengd wordt en geld bespaard wordt. Verlaag consumptiekosten, behoud goede weldkwaliteit en verbeter de weld-efficiëntie. Eenvoudige bediening en gemakkelijk te gebruiken.
Voordelen van geweerreinigingsstations: 1. De geweerschoonmaaktijd is kort en de systeembeschikbaarheid is hoog. 2. Automatische voltooiing van het geweerreinigingsproces zonder handbediening. 3. Voorkomt kwaliteitsproblemen die worden veroorzaakt door verontreiniging tijdens het lassen. 4. Ugerust met een robot TCP kalibratie-naald.
Robotlaspsoftware
De software kan automatisch lasnaden uit tekeningen extraheren zonder lasmarkering, waardoor het handwerkzaamhedenvolume wordt verminderd. Met de high-performance 3D-engine en robotcontroller worden de automatisch gemaakte punten gesimuleerd en gevalideerd om botsingen in werkelijk werk te voorkomen.
En zonder tekeningstype, 3D-scanning reverse modellering, snel genereren van 3D-tekeningen, automatisch genereren van robotlaspad, optimalisatie van laspad, houdingvisualisatie, automatische detectie van laspistoolbotsingen.
LDWP-305 lasertracker
LDWP-305 is een intelligente lijnscannende lasnadsensor. Deze verkrijgt de contou rinformatie van het lasnadsprofiel door middel van lijnlaser scanning en gids de robot of lasmachine om automatisch het lassen te voltooien. De functies van beeldverwerving, -verwerking en lasnadidentificatie worden binnen de sensor uitgevoerd zonder behoefte aan een externe computer. Het heeft een hoge integratie en verlaagt de totale hardwarekosten van het systeem. Bestand tegen booglicht en spetteringen, intelligent herkenning van lasnaden, en gemakkelijk in bedrijf te nemen. Het heeft een fraaie structuur, compacte afmetingen, hoge toegankelijkheid en een rijke verscheidenheid aan typen. Het kan volgens de toepassingscontext worden geselecteerd en gebruikt worden, en de meest geschikte parameters kunnen worden aangepast.

Voordeel
1.Ondersteunt niet-onderwijs voor verschillende producten zoals sandwichpanelen, trussbalken, steunplaten, brugafdelingen en panelstandaarden;
2. Er is geen behoefte om lasnaden te markeren in het ontwerpstadia, en de doelwitpositie van de las kan automatisch worden geëxtraheerd door 3D-tekeningen te importeren;
3. Geen menselijke tussenkomst vereist, de robot voltooit automatisch acties zoals nulretour, overgang, posities zoeken,lassen, tellen en schoonmaken van de lanceerarm;
4. Geen ter-plaats operatie vereist, het programma kan op elk moment en op elke plaats worden gegenereerd, en op afstand naar de robot worden verzonden voor productie volgens de gespecificeerde tijd;
5. Eigen ontwikkelde offline programmering, 1:1 simulatie van robotbewegingen, voorkomt robotinterferentie van tevoren en vermijdt botsingen;
6. Digitale twin technologie kan ter plaatse de robottrajecten, lasspanning, stroom, snelheid en andere productie-informatie in realtime weergeven.
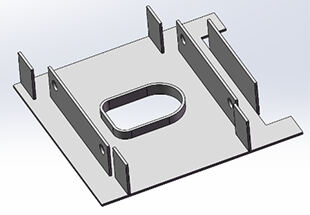
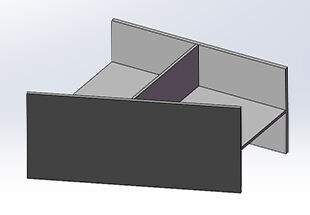
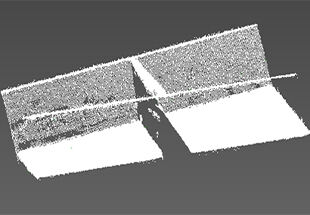
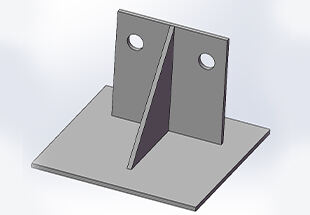
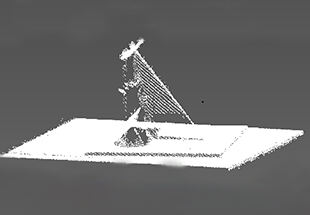
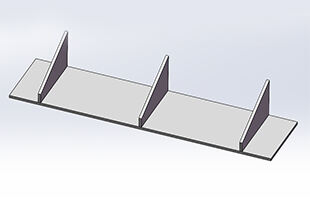
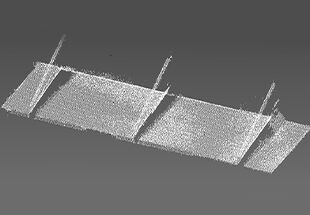
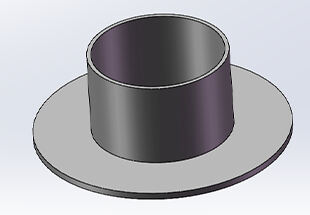
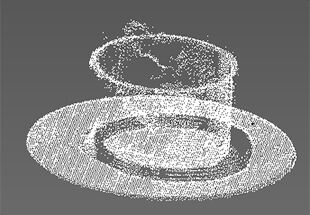
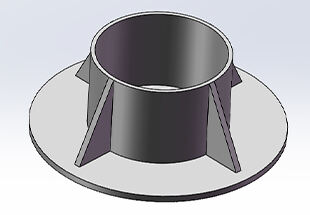
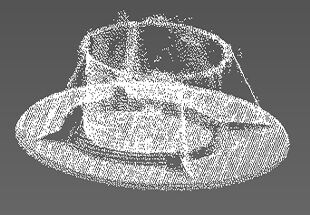
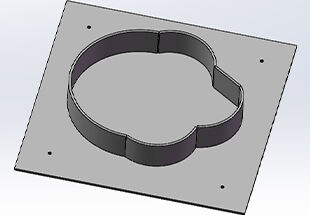
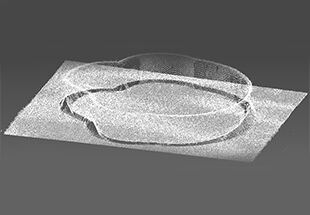
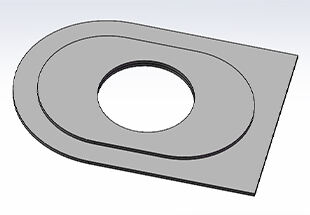
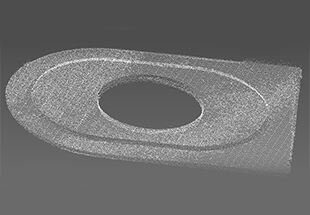
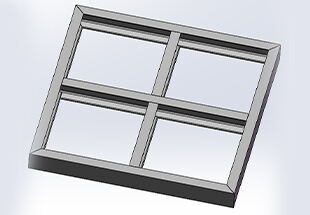
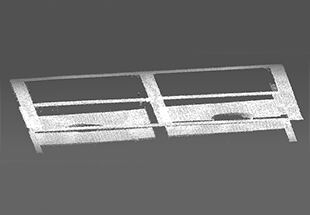
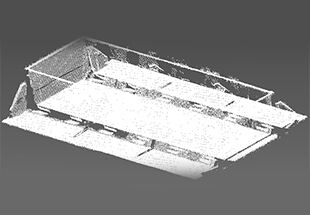
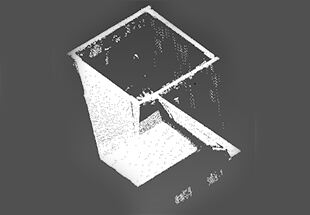
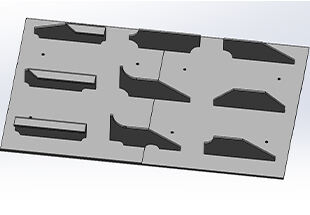
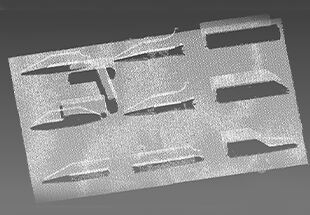
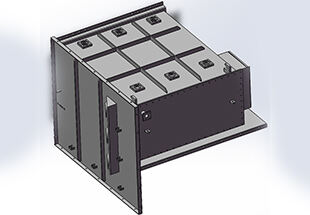
| Nee | Type werkstuk | Afbeelding van werkstukmodel | Puntwolkafbeelding van werkstuk |
| 1 | H-profiel (Inclusief staalsoorlasnaden) | 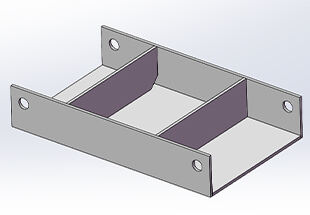 |
 |
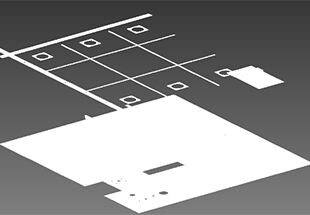
| 2 | Plaat eenheid |
 |
 |
| 3 | Stalen schorsteun |
 |
 |
| 4 | Gebogen |
 |
 |
| 5 | Purlin ondersteuningsplaat |
 |
 |
| 6 | Ronde buisbasis |
 |
 |
| 7 | Kruisvormige circulaire buisbasis |
 |
 |
| 8 | Vreemde oppervlakte |
 |
 |
| 9 | Dubbel laag plaat |
 |
 |
| 10 | U-vierkant balk montage |
 |
 |
| 11 | Dubbelsoldatuur | 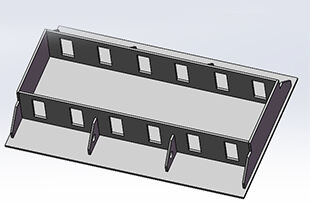 |
 |
| 12 | Doorgangsbalk |
 |
 |
| 13 | Onregelmatig buigen en lassen |
 |
 |
| 14 | Transformator tank |
 |
 |





