EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


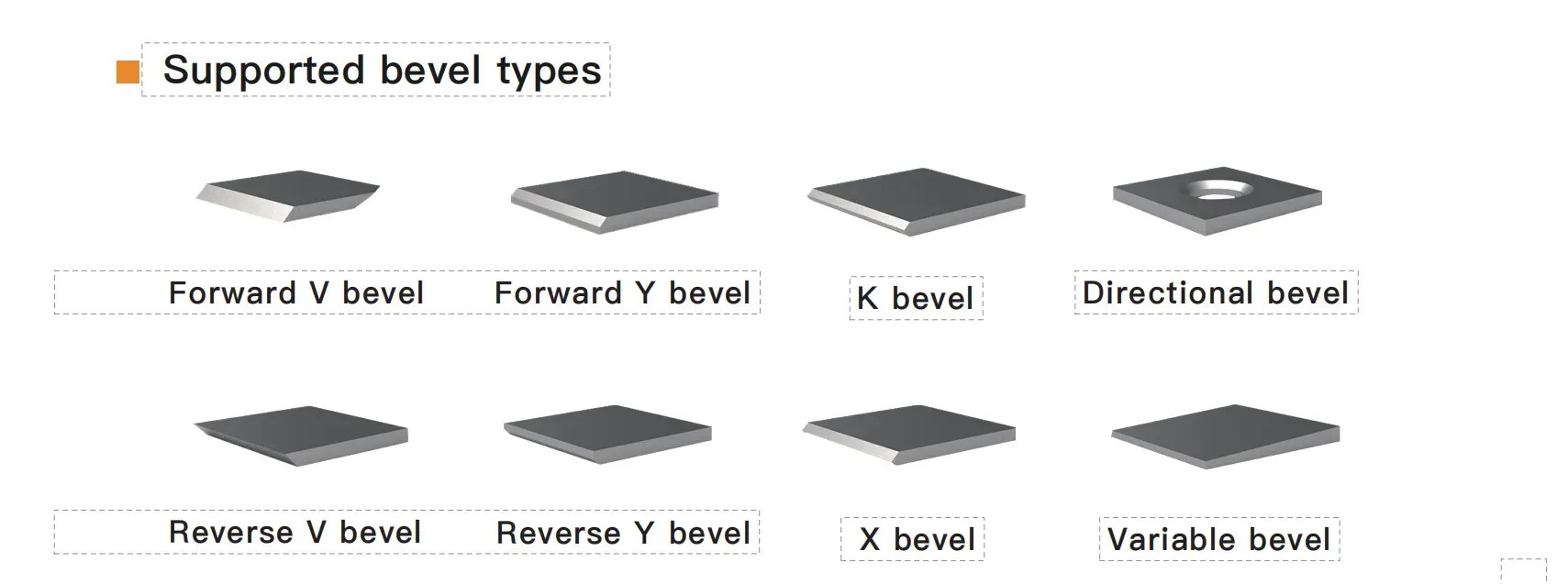
Программгүй интеллектуал бусад хажуугийн цэцэн шингээх роботын станцын
Зогсоо хуваах Асуудлууд, ажиллах үйл амжилттай байдал нь борлуулалтад шилжих чөлөөгүй цэг
Зогсоо хуваах, өмнөх процессын холболтын үед хийгддэг. Хөлбөмбөг, төмсний бусад байгууламж, коалын машин зэрэг салбаруудад дасан цэвэргэлийн өмнө тусгай материалуудын эргээс зогсоо хувааж, тэдгээрийг нэгтгэн холбож, одоо нэг лавлах эсвэл их тооны давхар лавлах хийх боломжтой. Ажлын үйл амжилттай байдал нь борлуулалтад чөлөөгүй цэг болсон. Иймд хөлбөмбөг, төмсний бусад байгууламж, коалын машин салбарууд нь роботын зогсоо хуваахын хувьд ихээхэн хэрэглээгийн дагуу хүссэн. Зогсоо хуваах ажлын төрлүүд нь мянгаас дээш тооноос үлдэгдэл байдаг, төрөл бүр нь зургаан эсвэл зуун хэмжээний хэмжээнд тооцогдоно. Мөн олон төрлийн, бага тооны, эрчимтэй үйлдвэрлэлийн хэрэгслүүдийн хэрэглээ нь ихээхэн нэмэгдэж байна.
Төмсний байгууламж, хөлбөмбөг, барилгын машин, коалын машин салбаруудад үйлдвэрлэлийн өөрчлөлтийн үйл амжилтыг сайжруулах шаардлагатай.
Үндсэн хязгаарлах аргуудад ихэнхдээ хязгаарлалтууд байдаг
Гарчигт байршилд байдаг тодорхойлогчийн зуурал үргэлжлэг шилдэг болгохын тулд бөмбөрцгийн машин ашигладаг, хөрш тележкаар дугаарлагч, таван тэнхлэгт тохиромжтой зуурал боловсруулах машин, роботын тодорхойлогчийн зуурал.
Эх сурвалжийн тодорхойлогчийн зууралтай харьцуулахад, бусад бүтээгдэхүүний үйлдвэрлэгчид роботын тодорхойлогчийн зуурал нь хамгийн зөв зуурал болохыг итгэж байна.
Ялгаатай төрлийн, бага тооны ажлын бүтээгдэхүүнүүдийн улмаас тодорхойлогчийн шинжлэх ухааны арга нь их хязгаарлалттай байгаа, тус бүрэн мэдрэмжийн зураасан үйл ажиллагааны нарийвчлал, зууралын үйл ажиллагааны параметрүүд ихээр чухал байдаг.
Ингээд роботын компаний, системийн интеграторууд болон эх сурвалжийн ашиглалтын албан ёсны байгууллагууд нь хялбар, хэрэгжүүлэхэд зөвлөмжтэй “гэж n-оролцоогүй ” бодлого хэрэгтэй гэж үзэж байна.
Миньё интеллектуал тодорхойлогчийн зуурал бодлого нь RobotSmart Интеллектуал Шийдэл Систем , SmartVisions 3D бүтцийн гэрэлтүүлэг систем болон SmartEye лазерийн харуул аргаар систем өгүүлбэртэй бусад илүү их оюутан биш үндсэн зорилгоор зөөврийн цэцэрлэг болон тодорхойлолтын хамгийн их байдлыг багасгаж, малgas эрдэнэний өөрчлөлтийг хангах боломжийг олгодог. Энэ нь өөр өөр хэмжээтэй, бага тооны бүтээгдэхүүнүүдийг үйлдвэрлэх шаардлагыг хангаж, ажиллах үйл ажиллагаагаа сайжруулж, гаралтыг нэмэгдүүлнэ. Төвлөрлийн хувьд ихээр ихээр өөрчлөгдөх, өөр өөр ажлуудтай харьцуулах.
гурван алхам: 1. зургийг импортлох; 2. хурдан замын төлөвлөх; 3. програм авtomат генерацийн дагуу танд хэмжээндээ хандах боломжийг олгодог.
Ашиглах MinYue Technology Илүү их оюун ухааны зөөврийн ажилтан станцын тухай, танд CAD-ийн DXF файл импортлоход зориулагдсан, үйл ажиллагааны параметрүүдийг тодорхойлох, процессийн параметрүүдийг нэг үедээ хослуулж, замыг автоматад хамгийн их оптимизацийн дагуу төлөвлөх, зөөврийн замыг интеллекттэй төлөвлөх, доод зөөврийг дахин хийхгүйгээр хоёр талаараа зөөвөрлөх боломжийг олгодог. камера ажлын объектын байрлалыг илэрхийлж, авч, цэцэн шилжүүлэх мэхийн зорилгоор ашигладаг. CNC үйлдлийн дараа цэцэн шилжүүлэх мэхээс авахад ашигладаг. Зургаан төрлийн ажлын объектуудтай адаптив, шигшүүлэх замыг автомат计划 болгон, шигшүүлэх хэмжээ 0.5-4 метр. Ажлын амжилт, эрхлэлтийг ихэвчлэн ашигладаг.
Флейм шигшүүлэх үйлдвэрлэлийг, плазма шигшүүлэх үйлдвэрлэлийг хамгийн их хүрээлэнгийн талаар ашиглах.
1 Хэрэглэх хүрээ
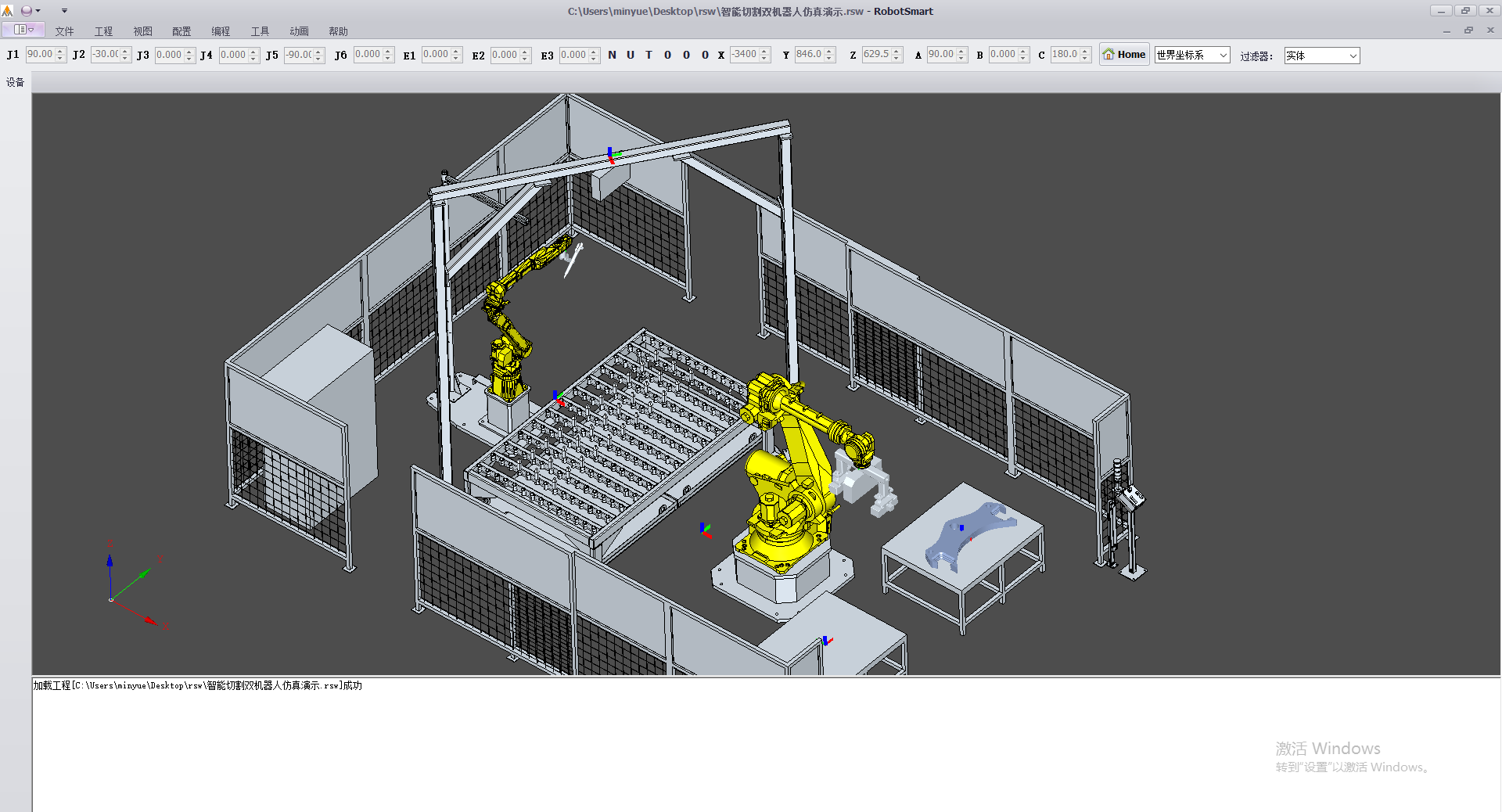
Д e шиг их сурвалжийн систем нь хоёр станцийн ажиллах мод байдаг, M20ID/25 урд талын робот, зөвлөхгүй хандлагатай сваринг систем, YLV25 гурван төрлийн роботын зогсоол, флейм шигшүүлэх систем, флейм шигшүүлэх аЖИЛЛАГААНЫ ТАВИУР , нийт 7 төрлийн төрөл байдаг.
Ашигладаг объектын хэмжээний хязгаар: 3200*2500mm ;
Шигшүүлэх үйлдэл: Флейм
Тохиромжтой орлого, гаргах төрлүүдийг хамгийн их хүрээлэнгийн талаар ашиглах, албан ёсны орлого, гаргах, баланс кран ашиглан орлого, гаргах, явах кран ашиглан орлого, гаргах, хоёр роботын хамтран ажиллах, CNC орлого, гаргах.
2 үйлдвэрлэлийн процесс
Ажиллах объектыг зөвхөн эргүүлэх орц дээр нь хуучин байршилд суулгах (±5мм-ийн дотоод ажиллах объектын давтамж).
Эхний үйлдвэрлэл нь програмчлалын тусгайлалыг сонгох, автомат гишүүдийн цолыг гаргаж, үйл ажиллагааны параметрүүдийг тохируулах боломжтой, программ устгагдсан бол хадгалж д контроль систем дээр, дараа нь үйлдвэрлэл нь тодорхойлсон програм дээрээс авах боломжтой (РоботСмартийн мэдрэмжтэй шийдлийн систем нь 15-20 минутанд дэлгэрэнгүй тохирох боломжтой).
Гарчлагч робот лазерийн зорилго сенсор
(эерэг тусам эргэлтийн харьцуулалтад дунджаар үр дүнтэй).
Робот эхлэх ажиллах объектыг гарчлагдаг.
Робот өөр аЖИЛЛАГААНЫ ТАВИУР гарчлагчийн үйл ажиллагаа.