EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


3D Зоригтой бусад хажуугийн плазма роботын шингээх
Ажлын хэмжээ:
Дээшний цаадах: 100x100-7000x1200мм@20-45°
Доорх цаадах: 100x100-6800x1000мм@40-60°
ҮГЭРСЭН ШИДЭТЭЙ ДУРЧЛАН ХӨРШЛОХ
Эхний ажил хөршлох болон барих, энэ нь ямар ч үйлдвэрлэлийн хязгаарыг зайлшгүй үзүүлдэг, энд мал ганцгийн хөршлөлийн тухай магадгүй. Мал ганцгийн хөршлөл нь одоогоор тодорхойlog flame cutting ашигладаг, энэ нь албан ёсны үйл ажиллагаагаа хийх, байршуулах, хөршлөх шаарддаг, тус бүрийн ажилд оролцоход дахин дахин цаг ашиглах шаардлагатай. Иймд традиционал flame cutting процесс нь хөршлөлийн тогтвортой, үнэт засвар, амжилтанд байдаг, ихэнх ажилчидын ажилд оролцож, хэрэглэгчдийн хэмжээнд бага.
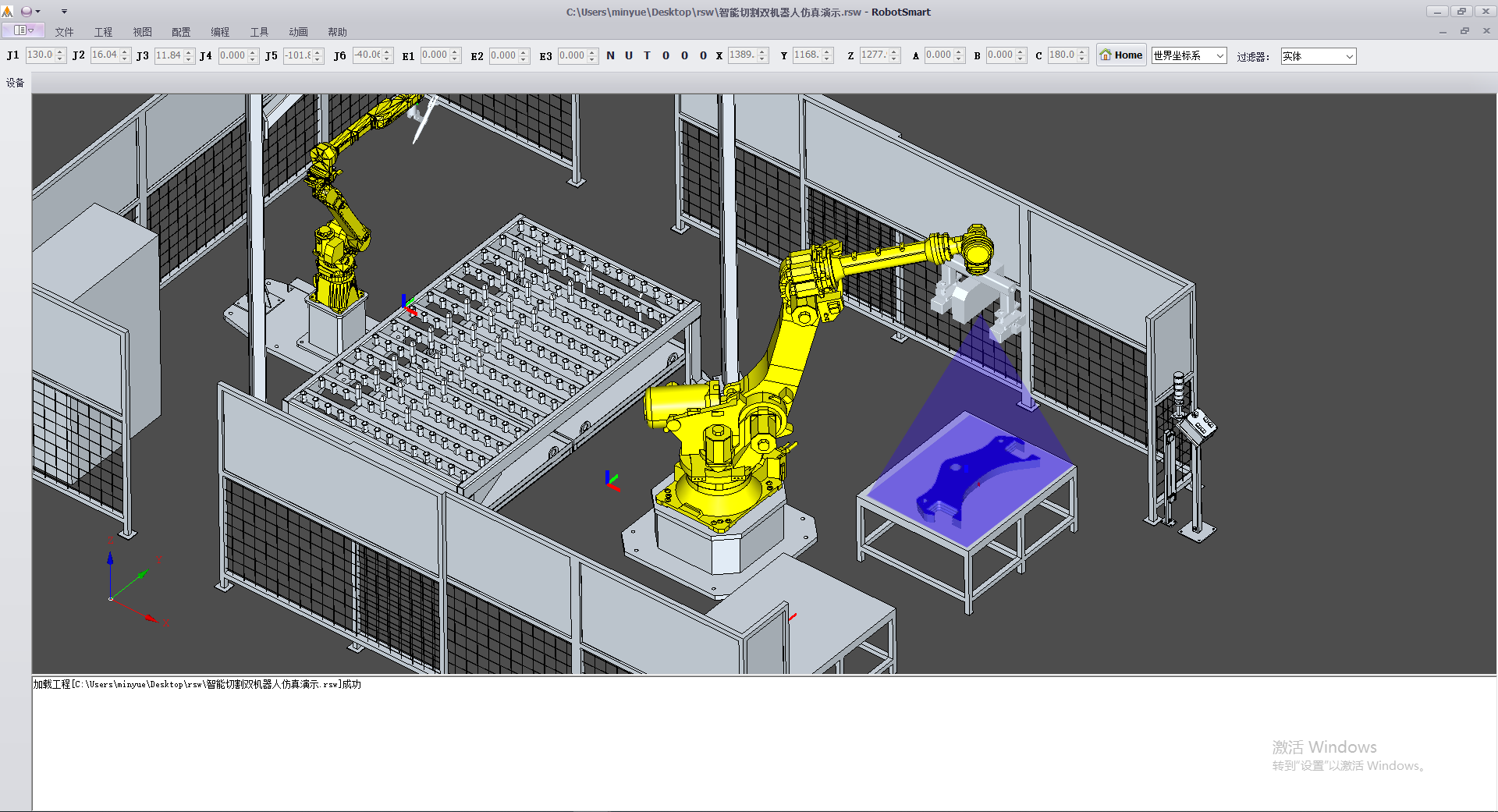
MINYUE TECHNOLOGY-ийн хичээлийн бус интеллектуал зүрхний өргөтгөл ашиглах нь RobotSmart интеллектуал шийдэл систем, SmartVisions 3D дурсны систем болон SmartEye лазерийн дагах системийг ашиглан "хөгжүүлэх програм бус + дурс" интеллектуал зүрхний өргөтгөлд оролцдог. Програмчлахад хялбар болон интеллектуал түвшин ихээр багагүй production pain points-ийг бодоход тусалдаг, эсрэгээс малgas workpiece-үүдийн жижиг хэмжээний batch-үүдийг өөртөө тохируулан дуусгаж, ажиллах үйлдвэрлэлийн амжилтыг нэмэгдүүлнэ.

Хамгийн их чадварлаг болон ялгаатай ажлуудыг хариуцахад гурван алхам байдаг.
1. CAD DXF файлуудыг импортлох; 2. Тойронгийн хурдтай төлөвлөх; 3. Зүрхний програм автоматчилсан үүсгэх, дараа нь зүрхний ажил хурдан дуусна.
Автомат зүрхний замыг боловсруулах, зүрхний замыг интеллектуал төлөвлөх, дээвэртэй зүрхний өргөтгөл бус.
Хоёр талт бинокль камера зураг авч, ажиллах объектын байршилд илэрхийлэх, дуудах болон цэвэрлэх мөрөнд нь хийгдэнэ. Цэвэрлэлт дууссан дараа CNC систем цэвэрлэх мөрөнд очиж ажиллана. Нэг үед олон ажиллах объектыг хамгийн их урт 0.5-4 метр хүртэл цэвэрлэх замыг автоматад планлагдаж, ажлын үйл ажиллагааг үнэтэй болгоно. Энэ нь ажлын үйл ажиллагааг үнэтэй болгох, эрхэмсэг болгоно. Флейм цэвэрлэлийн үйл ажиллагааг болон плазма цэвэрлэлийн үйл ажиллагааг хангах боломжтой.
Эрэлт, цэвэрлэлтийн төрлүүдийг хамгийн их хангах боломжтой: эрэлт, цэвэрлэлтийн төрөл, гарын ажил, хавтгай кран, эрэлт кран, хоёр роботын хамтран ажиллах, CNC эрэлт, цэвэрлэлт.
Үйлдвэрлэлийн процесс
● Цэвэрлэх мөрөнд ажиллах объектыг хамгийн сүүлчийн ±5мм хүртэл хамгийн том тохиолдолд хамгийн их тохиолдолд хамгийн их тохиолдолд.
● Хөгжүүлэгчийн програм хангамж ашиглан өөрөө нь зогсооны байрлалыг сонгох, дулаандаа тодорхойлогдсон цэвэрлэлийн замын зөрчил, болон процессийн параметрүүдийг үүсгэнэ. Үүсгэсэн програм нь хяналтын системд хадгалагдана, дараах үйлдвэрлэлд нь зөвхөн авч ашиглах боломжтой. (RobotSmart нь 15-20 минутанд шинэчлэлийн шийдэл үүсгэх боломжтой.)
● Цэвэрлэх робот нь лазерийн дүрсийн санал хүсэлтийг ашиглан ажлын объектыг зөвхөн тодорхойлно. (Энэ нь холбогдох эргэлзээний олон тооны хурд, зөвхөн батлагдсан хамгийн сайн үр дүнтэй.)
● Граунд Рельс, Гейнтийн, Кантелевер Робот Workstations-ийг харгалзах боломжтой.
● 12 шийдэл нь хэсгээр нь хэрэгжүүлэгчидтэйгээ холбоотой.
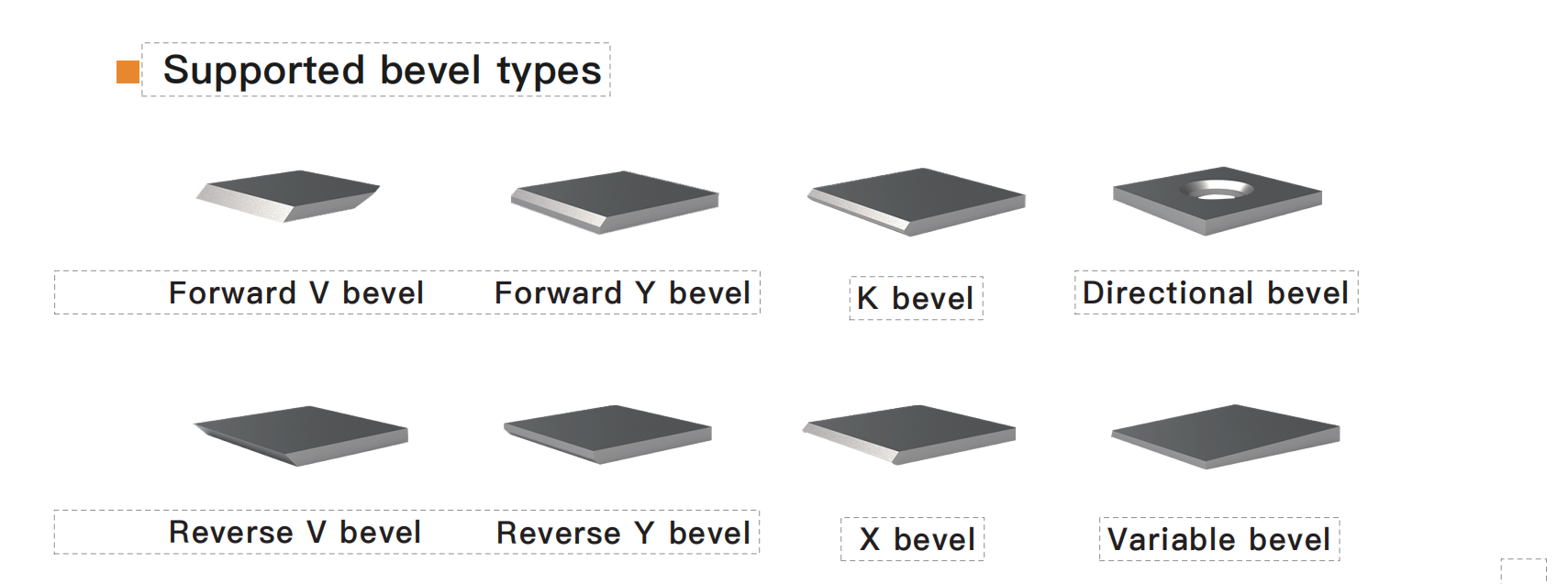
Харгалзах бусад өнгөрөлтийн төрлүүд