EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Программгүй сэдэвтэй роботын нийлүүлэгч барилга
“Бейжинг Минюе Хөгжлийн Хамтлаг, Ltd ”Чиний хамгийн эрдэнэ төвөгтэй хайрцаг шинжлэх ухааны байгууллага болох зүгээр сургалт байгууллагын роботуудад ашигладаг оюун ухаан . Өөрийнхөө RobotSmart-интеллектуал шийдэл үүсгэсэн гишигт боловсролын систем, SmartVision-хоёр цусны дүрсийн гарагийн харилцаатай систем, SmartEye - лазерийн холбоо нь шинэ үеийн интеллектуал роботуудад суурь үйлдвэрлэлийн зорчигч байдлыг олгоно.
Бидний байгууллаг нь графикийн талбартай, автоматиктой холбоотой магистр, доктор, техникийн эмнэлгийн хамгаалалтай баг бүтээгдэхүүн шинжлэх ухааны салбарт ажилладаг. Тэдний дотор 90%-н дээд магистр, докторын зэрэгтэй.
Роботын контрол, алгоритмууд, мэндчилгээний хоорондын яриа тухайн талбарт ажилладаг бид нь дундад засгийн байгууллагын салбарт интеллектуал роботын шийдлийг сайжруулахад итгэлтэй байдаг.
Хэрэв хэрэглэгч 3D ажлын бүтээгдэхүүний моделыг RobotSmart-ийн зөвлөмжийн системд оруулвал, програм нь ижил хугацаанд байгууламж роботын шилжилтийн кодыг автоматад генераци хийж, түүндээ харгалзах роботын шилжилтийн симуляц, дамжуулах шалгах, алдааны замын төрөл бодох, ерөнхий шинж чанаруудыг шалгах боломжийг олгодог. Энэ нь традиционал хамгийн их магадлалтай гарын авлага программчлалын асуудлыг устгана.
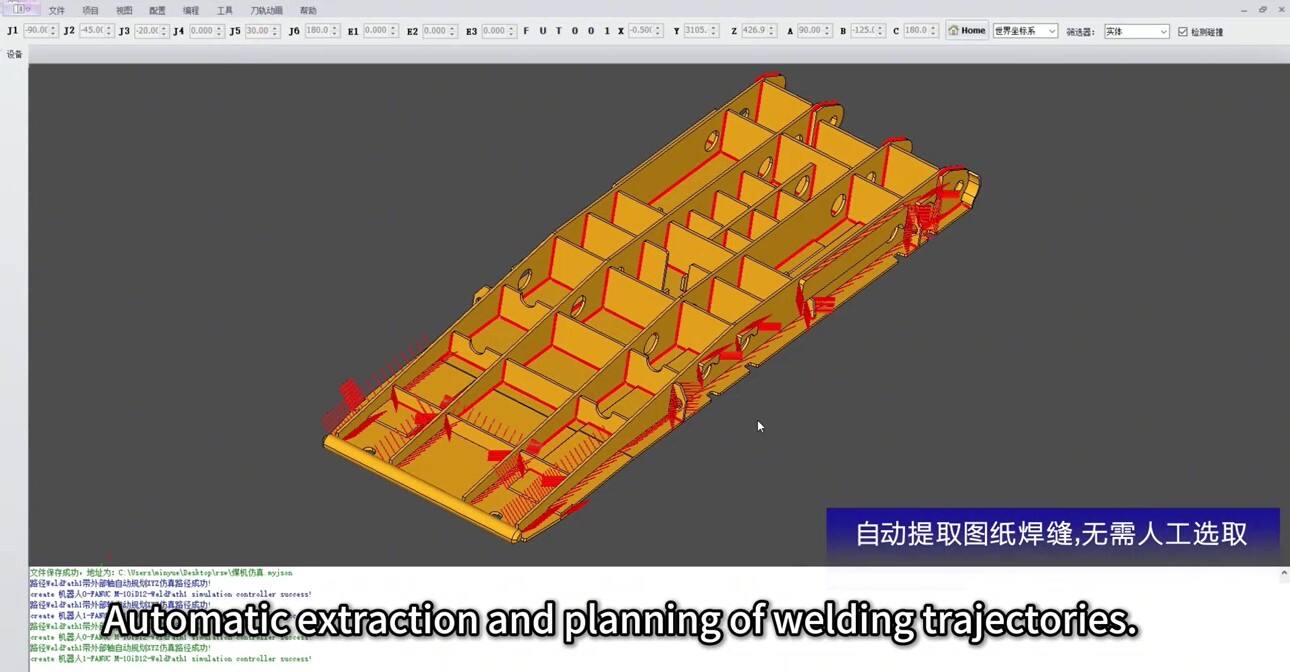
Шинэ зорилгоор явах, салбарын асуудлыг шийдэх.
Коал машин зэрэг төрлийн хидролик хангах буталгааны асуудал, байгууллагын шинэчлэлтэд өөрөөсөө үргэлжлэх
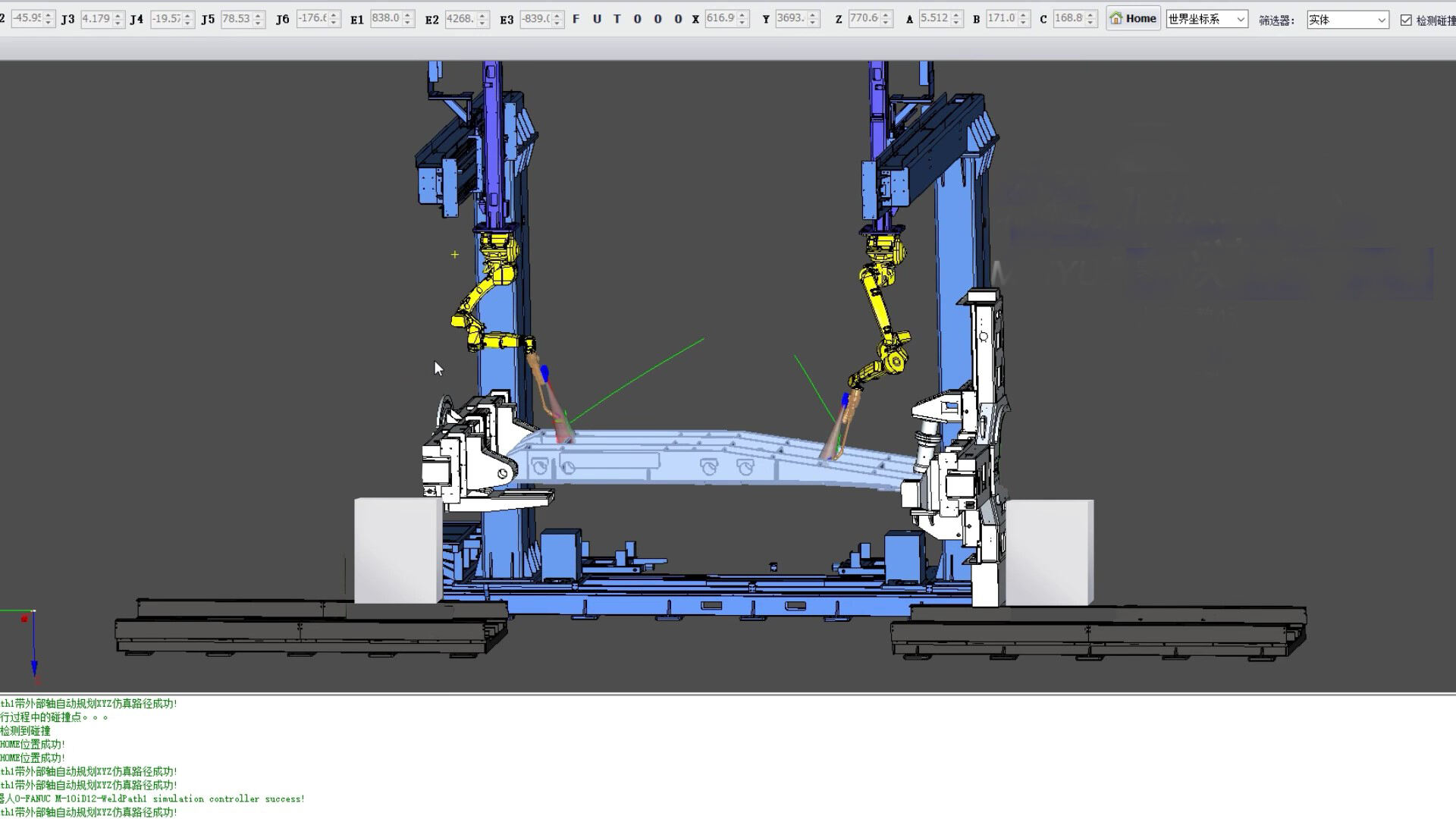
Коал машин зэрэг төрлийн байгууламжийн хамгийн их хэрэглэгчдийн хидролик цуглуулагчийн нэгжийн өндөр нь 20 тоннээс их байдаг. Тэдгээрийн ихэнх нь дундаж үргэлжлэх плитаас буталгаатай хавтаст байршина. Энэ нь хидролик цуглуулагчийн томоохон хэмжээний давуу талыг, үржигдэхүүнтэй холбоотой байдаг. Хидролик цуглуулагч нь гурван хэмжээтэй эсрэг замын буталгааныг хяналт хийдэг.
1000 саяны дээд буталга . Энэ нь ихэнхдээ дунд хэмжээний бага зэрэг таваны цонхны олон амралтын хамгаалалттай лавлах юм. Лавлах шүрхээ нягтралтай, лавлахад хүрээлэнгүй байдаг, энэ нь ажиллах газрын байгалийн үйл ажиллагаагаас хамаарч байна.
Тоолуур, бүтэц болон арга хэмжээнд хамаарахдаа хийгддэг лавлах нь лавлах чанарын тогтвортой байдлыг хангах боломжгүй.
Эрдэм шинжилгээний роботын лавлах ашиглах.
- Сургалт програмчлал р үйл явцад зогсоо хэрэгтэй, роботын ашиглалт нь бага.
- Бүтэц нь ихээхэн бодит бөгөөд, фреймүүдийн дотор бусад фреймүүд байдаг, хэмжээнд ялгарсан байдаг, мөн 1000-с илүү лавлах шүрхээтэй шаардлагатай 5 настай оруулах програмчлал手工.
- Ажиллагчийн зориулалтын бүтэц, хослуулалтын зөвшөөрөл тохирохгүй, цөөн хэсгийн лавлах шүрхээний усны температуртай хувиралт нь лавлах шугамыг солино.
- Бүх хидролик системийн роботын зуучлалын автоматикийг ажиллуулах нь их хэцүү байдаг. хангах структурын хэсгүүд.
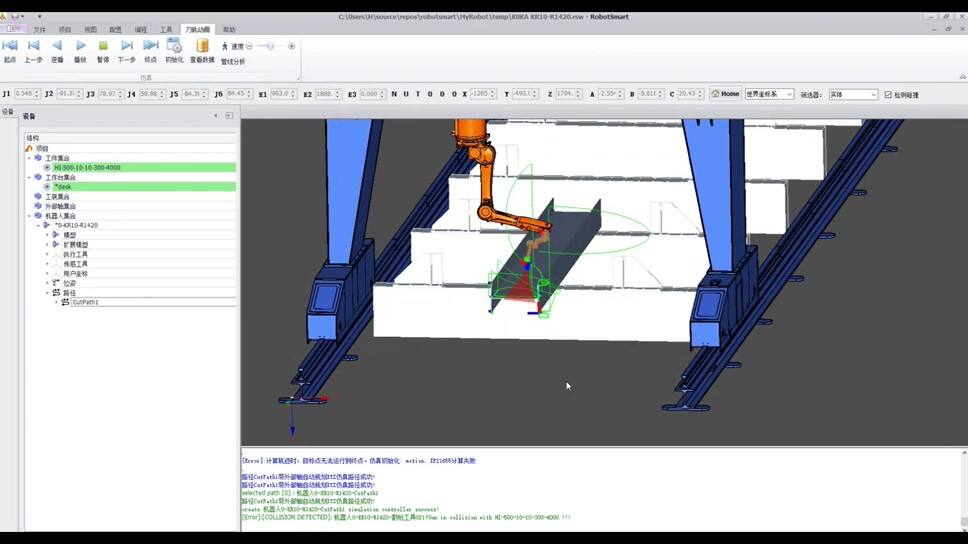
Коалын машинийн салбарт аюулгүй технологийн эмгэгч компани Minyue Technology-ийн нэг товчны эхлүүлэх, орчин үеийн зуучлалын утга шинэчлэлийг ашигладаг.
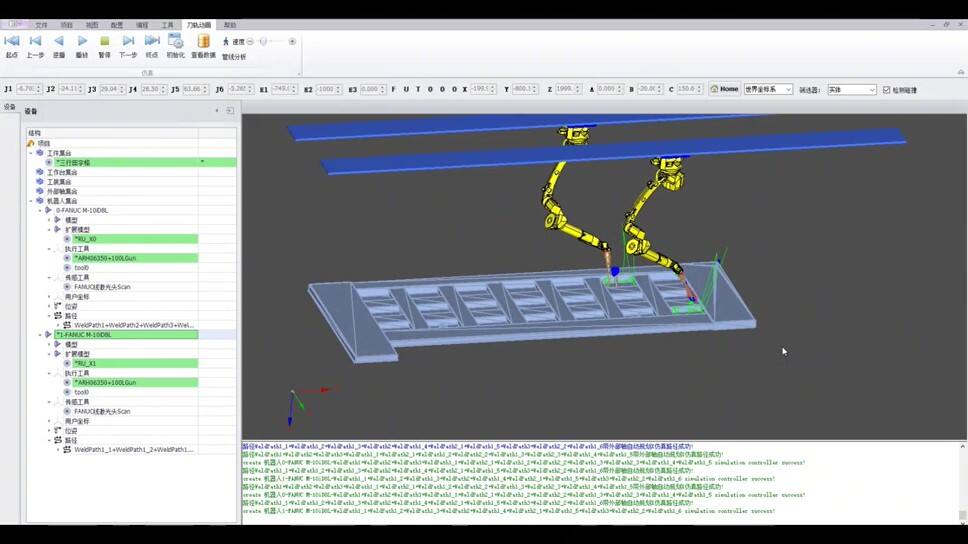
Үе-1: Гар ямар ч ажиллагч 3D загварыг RobotSmart - Шийдлийн системд импортлоно.
Хэвтээ 2: RobotSmart-Эрмэлзэн шийдэл гаргах систем, тус систем нь олон зорилготой роботын бүтэцний гадаргууг авч үзэх, зөвлөх, холбогдох боломжийг олгоно. Түүнчлэн роботын хөдөлгөөний симуляци, дамжуулах, хавсаргаа ашиглах, төвдөөс өргөх, тэнхлэгийн хязгаарыг шалгах боломжийг олгодог.
Хоосон 3: SmartVision-3D хоёр сарын бүтцийн гэрэлтүүлэг визуал систем нь ажлын объектыг томъёолсон байршилд суулгана.3D хоёр сарын бүтцийн гэрэлтүүлэг визуал систем нь ажлын объектын доод хавтасыг сканирч, цэгний мэдээллийг ашиглан бусад моделийг буцааж үзүүлнэ. Моделин зөвхөн ± 5мм-аас бага анхны байршилд суулгах үед 40 мм-аас бага зургийн зөвхөн ,10-н дотоод өнцгийн хамтран байрлалыг шинжил °。 30 мм (засварлагдаж болно) зайд нь холшигны уртын өөрчлөлтийг шинжил 。
Хоосон 4: SmartEye - Лазерийн харуул төслөөс. Холшигны хэрэгслийг сканих, холшигны байрлал болон мэдээллийг баталгаажуулах, 3D цифрийн моделийг бүрэн байршуулах болон үндэстний арлууртай холшигны байрлалын өөрчлөлтийг олох, үндэстний холшигны байрлалын өгөгдлийг авах. Төсвийн робот, гадаадын тэнхлэгтэй хамтран ажилладаг байршлага хамтран ажилладаг.
SmartVision-3D хоёр цаасан бусад 3D төслүүдийг импортлох систем ,Олсон 3D цэгний бутархайн өгөгдлийг 3D цифрийн моделтой харьцуулна ,Цэгний бутархайны өгөгдөлтэй холшигнуудыг л робот холшигдсан. Сенсорын олсон цэгний бутархайны өгөгдөл нь шинэ хэсгүүдийг ашигласан үндэстнийг бүрэн байршуулсан 3D моделтэй таарахад шинэ хэсгүүдийг холшигдсан.
Илүү нэг үед үйлдвэрлэлийг эхлүүлэх, 2 минутанд арцыг эхлүүлэх, хурдан, зөв, програмчлагдахгүй, их амжилттай, их дотоод үнэ цэнэтэй.
Технологи хөгжүүлэх, байгууллагын дурдах.