 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


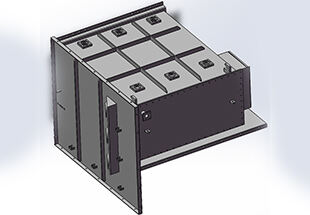
Станица за интелигентно сварување на стомансka конструкциja со тип релсови од земја

Сварувачкиот робот со подни релски е опремен со интелигентен систем за сварување Friendess без наставување и пратечки на шов со голем визуелен раздалечин. Може директно да импортира 3D моделски датотеки од Tekla, SolidWorks или UG, директно да ги спореди параметрите на сварувачкиот процес, автоматски да го идентификува точната позиција на шовот и да генерира најдобро оптимизиран сварувачки процес за сварување.
Типот на релно движено оска зголемува адаптивноста во должинскиот насок. Роботот може да се поврзе со релот за да спои дури и по должни џепови одеднаш, а работната станица може да работи на левата и десната страна на релот. Примарно се користи за спојување на ребра на H-балки, основни плочи, поддржувачки плочи, корбели и други конструкции.
| Робот | 1 комплект Фанук робот |
| Опционален спојен извор на енергија | Аотај спојна машина и неговите припаѓања или Мегмиет спојна машина и неговите припаѓања |
| Спојен систем | МИНИЮЕ програмски софтвер за автоматско програмирање без наставување, МИНИЮЕ лазерска визуелна следење система. |
| Применливи сценарија | Пригоден за спојување на укрепнувачни плочи, корбелски делови, мали конструктивни делови итн. Сега може да се користи за H-образни главни балки и вторични балки на челични конструкции, малите и средни плочени единици на морски мостови, H-образни челични колони за опрема, платформски балки за опрема и други конструкции. |
| Систем за чишћење на пушка | SC220A систем за чишчење на пушка |
| Должина на релот | 6 метри (опционално според корисникот) |
Систем за чистење на пушка
Чистечката станција SC220A за роботска сварување е уред за чистење на сварувачките пушки. Се користи за автоматско чистење на сварувачките отпадоци од сварувачката пушка токму кога се извршува роботско сварување, автоматско секање на жиците и заштита на насадката на сварувачката пушка и контактниот врв, што ја продожува животната длабочина на сварувачката пушка и ја намалува трошоците. Намалува трошоците за потрошувачки материјали, одржува добра квалитетна сварка и подобрува ефикасноста на сварувањето. Просто управување и лесно за користење.
Применувања на станции за чистење на пушка: 1. Времето за чистење на пушката е kratko и системот има висока достапност. 2. Автоматски завршува процесот на чистење на пушката без ручно управување. 3. Предупреждува квалитетни проблеми предизвикани од загадување токму кога се сварува. 4. Еквипиран со игла за калибровка TCP за роботи.
Софтвер за роботско сварување
Програмот може автоматски да извади врвови од цртежите без означување на врвови, што се сведува работната тежина на ручно учество. Со високопроизводителниот 3D енгин и роботскиот контролер, автоматички создадените точки се симулiraат и верификуваат за да се избегнат колизии во стварната работа.
И без тип на цртеж, 3D скенирање и обрана моделација, брзо генерирање на 3D цртежи, автоматично генерирање на роботска траекторија за врвежење, оптимизација на траекторијата за врвежење, визуелизација на позиција, автоматско засечување на колизии со врвежачката горе.
LDWP-305 лазер следбач
LDWP-305 е интелигентен сензор за скенирање на врвови при сварување. Тој го добива контурниот информации од пререзот на сварувачкиот врв преку линејско лазерско скенирање и води роботот или сварувачката машина да автоматски завршат со сварувањето. Функциите за придобивка, обработка на слики и идентификација на сварувачкиот врв се извршуваат во самиот сензор без потреба од надворешен компјутер. Тој има висока интеграција и намалува целосните тешковински трошоци на системот. Отпорен на дугме и спатери, интелигентно ги идентификува сварувачките врвови и е лесен за употреба. Има елегантна конструкција, компактни размери, висок достап и богат вид. Може да се избере и користи според апликациониот сценарио, а најсоодветните параметри можат да се прилагодат.

Предност
1. Поддржува неучително функционирање за различни производи како што се триклини панели, просторни бремени, зagrada, мостови и панелни стоечки;
2.Не е неопходно да се означуваат врвовите на дизајн стадиумот, а целната позиција на врв може автоматски да се извлече со увоз на 3D цртежи;
3.Не е потребно човечко усогласување, роботот автоматски ги завршува дејствијата како нула враќање, премин, пронаоѓање на позиција, врвенje, броенje и чистење на пушка;
4.Не е потребна на местна операција, програмот може да се генерира во било кој момент и место, и да се испрати на роботот оддалеч за производство според одредениот временски период;
5.Саморазвивање на офлайн програмирање, 1:1 симулација на движењето на роботот, предвремено го избегнува конфликтот на роботот и ги избегнува колизиите;
6.Дигитална двојчина технологија може да прикажува на местото траекторија на роботот, волтаџ за врвенje, ток, брзина и друга производствена информации实时.
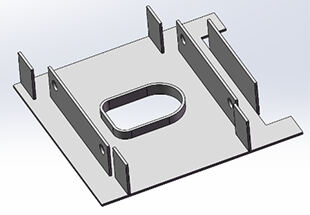
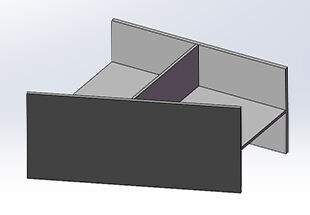
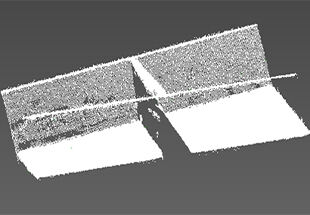
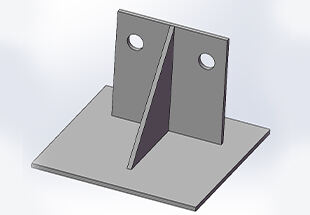
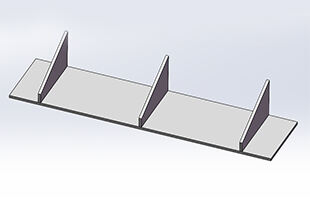
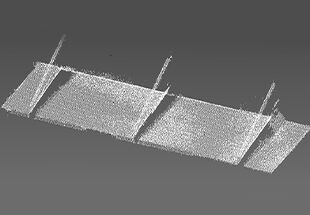
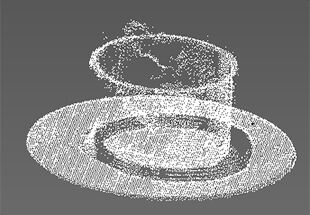
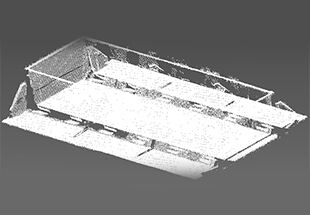
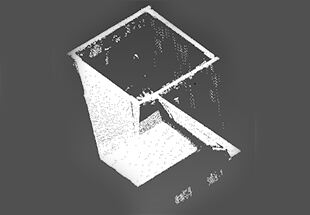
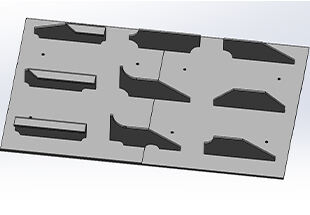
| НЕ | Вид на деловодник | Слика на моделот на деловодник | Точково облак сликa на деловодник |
| 1 | H Балка (Вклучувајќи ги врвенjа на тор) | 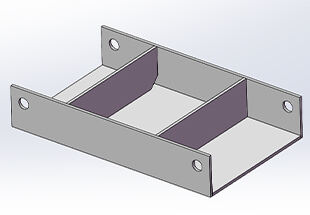 |
 |
| 2 | Плочен единица |
 |
 |
| 3 | Челно од челич |
 |
 |
| 4 | Кулевиден |
 |
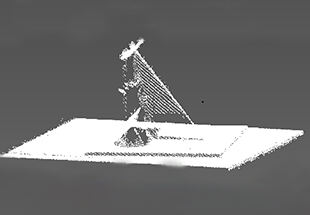 |
| 5 | Плоча за поддршка на пурлин |
 |
 |
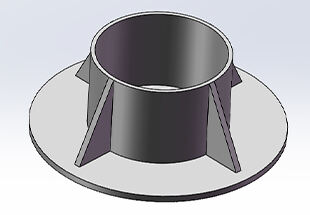
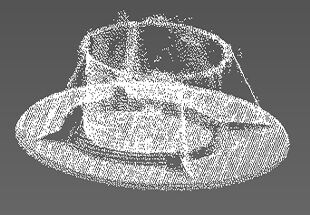
| 6 | Основа од кругла цевка |
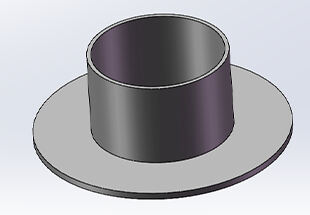 |
 |
| 7 | Крстовидна основа од кругла цевка |
 |
 |
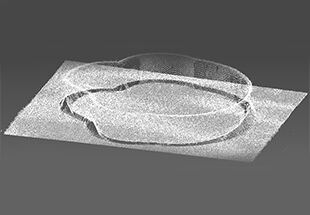
| 8 | Потпуштена површина |
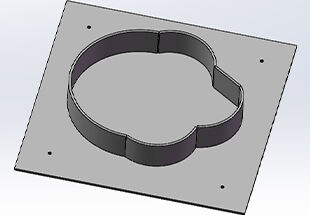 |
 |
| 9 | Двослоен плочев материјал |
 |
 |
| 10 | Монтажа на канално бреме |
 |
 |
| 11 | Двострано засварено пресекнување | 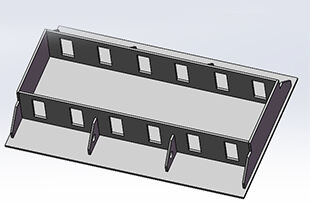 |
 |
| 12 | Кутијаста греда |
 |
 |
| 13 | Нерегуларно извивисто сварување |
 |
 |
| 14 | Трансформаторска чекор |
 |
 |





