 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



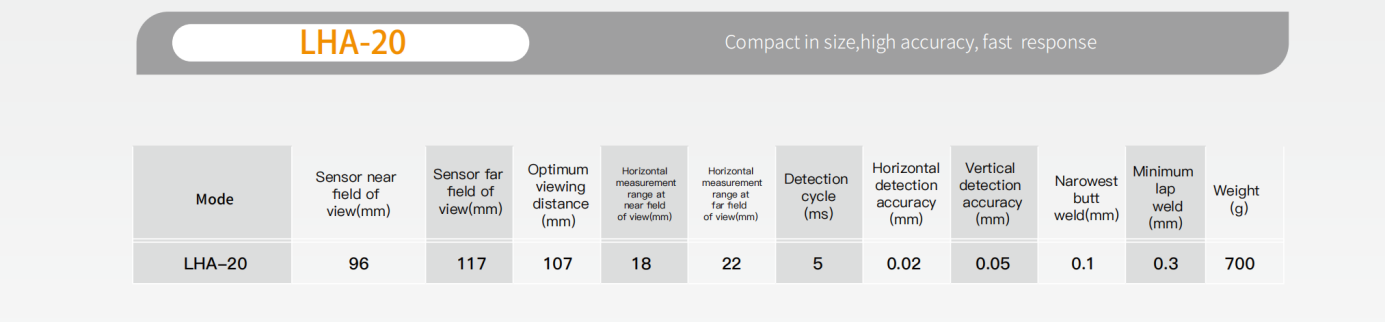
LHA-20 Лазерен сензор за праќање на џеп
Со можност за наоѓање на позиција, пратење во реално време, скенирање и автоматско сварување.
- Пregлед
- Поддршка за роботска марка
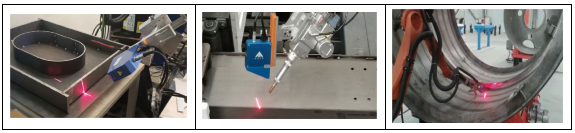
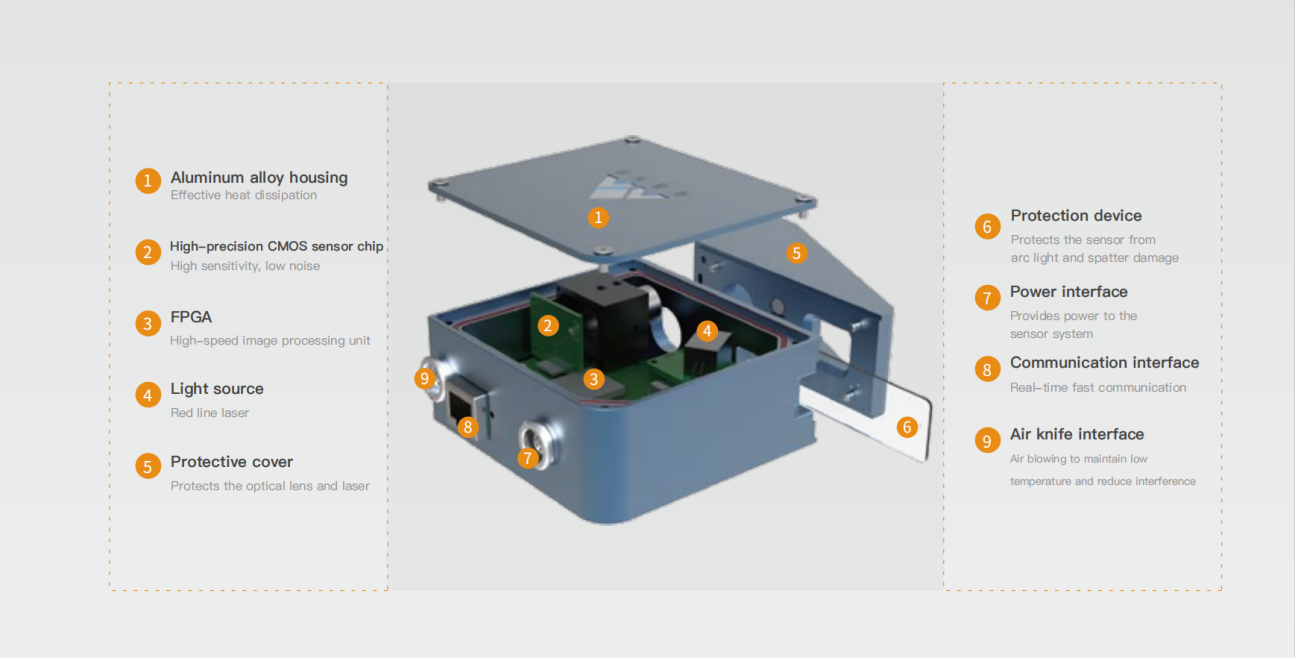
Сензорот за следење на везувачката џепа користи лазер за ослобнување на површината на везувачката џепа, што формира лазерен светлински појас, кој е примат и сликовит со високоразрешителна камера. Со алгоритамско обработување, тродимензионалните карактеристики на везувачката џепа се трансформираат во структурирана информации, вклучувајќи координати на везувачките џепи, несогласности, размаки итн. Овие информации се пренесуваат до контролерот на роботот, кој му доставува на роботот потребните траектории и процесни параметри за везување, го води роботот да везува или коригира одклоните на работните делови во реално време и постигнува перфектно везувачко работа. Според другите решение, лазерното следење на џепи има предности како што се: безконтактност, висока прецизност, брза брзина и добра адаптивност.
Сензорот користи линеарна структурирана светлина за мережење, што има брзина на линеарно сликање, без контакт и без механички движок; Јака адаптивност, способен да извршува излаз на параметри за везувачки џепови; Полу ембедед систем со надворешни индустријски контролни компјутери и многу други предности, што го прави шiroко користен во различни видови автоматизирани везувања. Независно од процесот на везување, можеме да овозможиме надежна поддршка и стабилна перформанса за да се осигура одличен резултат во различни везувачки ситуации.
Полно графички софтверско интерфејс, постапка за поставување на параметри, детали на помошни менини, непрофесионалците исто така можат да се запознаат брзо.
*Детекција на нула размак се однесува на сензори кои се опремени со оваа функција, што може да се користи за идентификување на размаци под 0.1mm
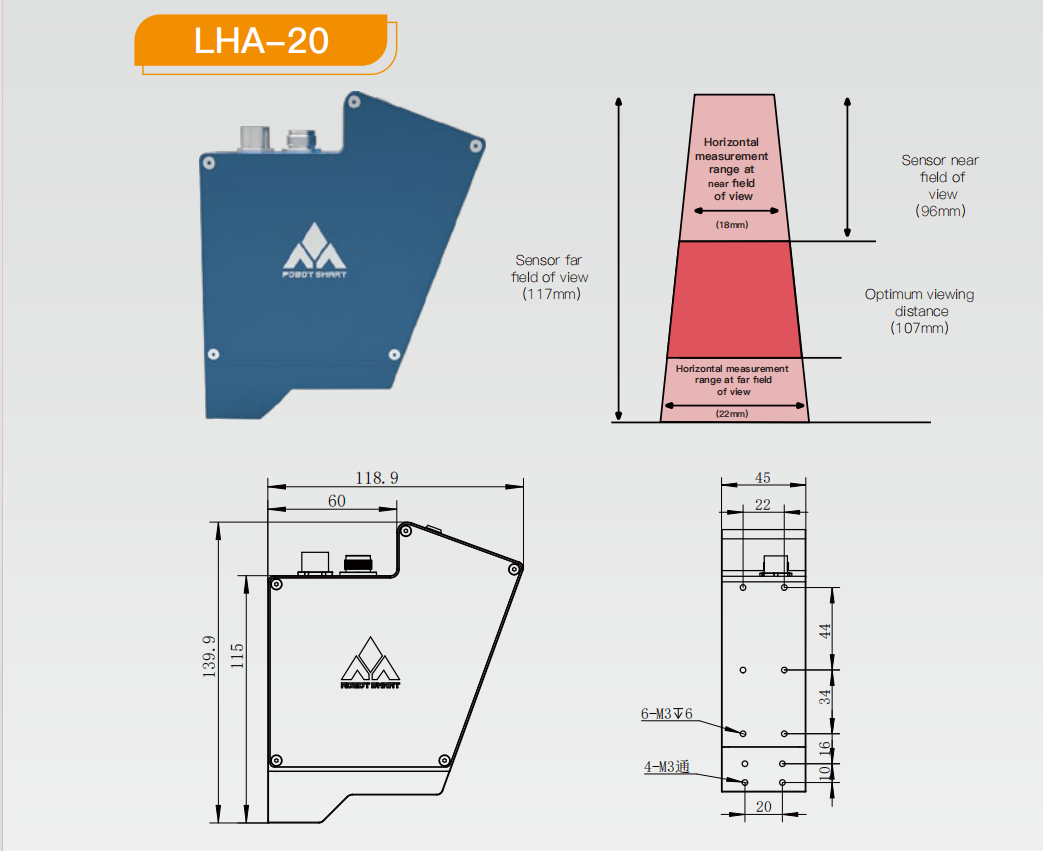
*Прегледниот растојание е само за референца и може да се прилагоди според специфичните потреби на корисникот
Сензорот е пригоден за најтешките апликации, бидејќи е неосетлив на посторони светлина, вода и прах (IP67) и имун на електромагнетното зрачење (EMC).
Со Могучи Функции.
01. позиција и коригирање на отстапување
Функцијата за позиционирање и корекција на отстапувањето се користи во флексилбни сценари за сварување на различни делови со ист модел, но со несогласни толеранции. Оваа функција осигурува дека нема да биде потребна ручна интервенција при преминувањето на деловите, а роботот е насочен од системот за позиционирање и корекција на отстапувањето за да постигне прецизно сварување.
Позиционирање со две точки, соодветно за сварување со 2D отстапување по прав линија.
Многуточково позиционирање, соодветно за многу-сегментно 2D отстапување при сварувањето.
Сегментско позиционирање, соодветно за многу-сегментно 3D отстапување при сварувањето.
02 Реално-временско следење
Функцијата за реално-временско следење се користи во сценари за сварување кои бараат висока ефикасност и без просторно меѓусебно засекување. Сензорот е фиксiran според сварувачкиот пистолет, и сварувачкиот пистолет автоматски регулира патеката за сварување според 3D координатните податоци.
03.Скенирање и Автоматско Везување
Функцијата за скенирање и автоматско врвање дозволува на сензорот да ги собере геометриските информации од врвовите. Оваа функција е соодветна за високо рефлективни, узеки врвачки простори и комплексни врвачки сценариуми.
Лазерско следење на џепови
Лазерското следење на џепови може да детektira отстапувања на врвовите нагоре, надолу и лево-десно.
Може да детektira врвови со мали размакови.
Решава проблемот со следење на врвачки џепови за тонки плочи со спој.
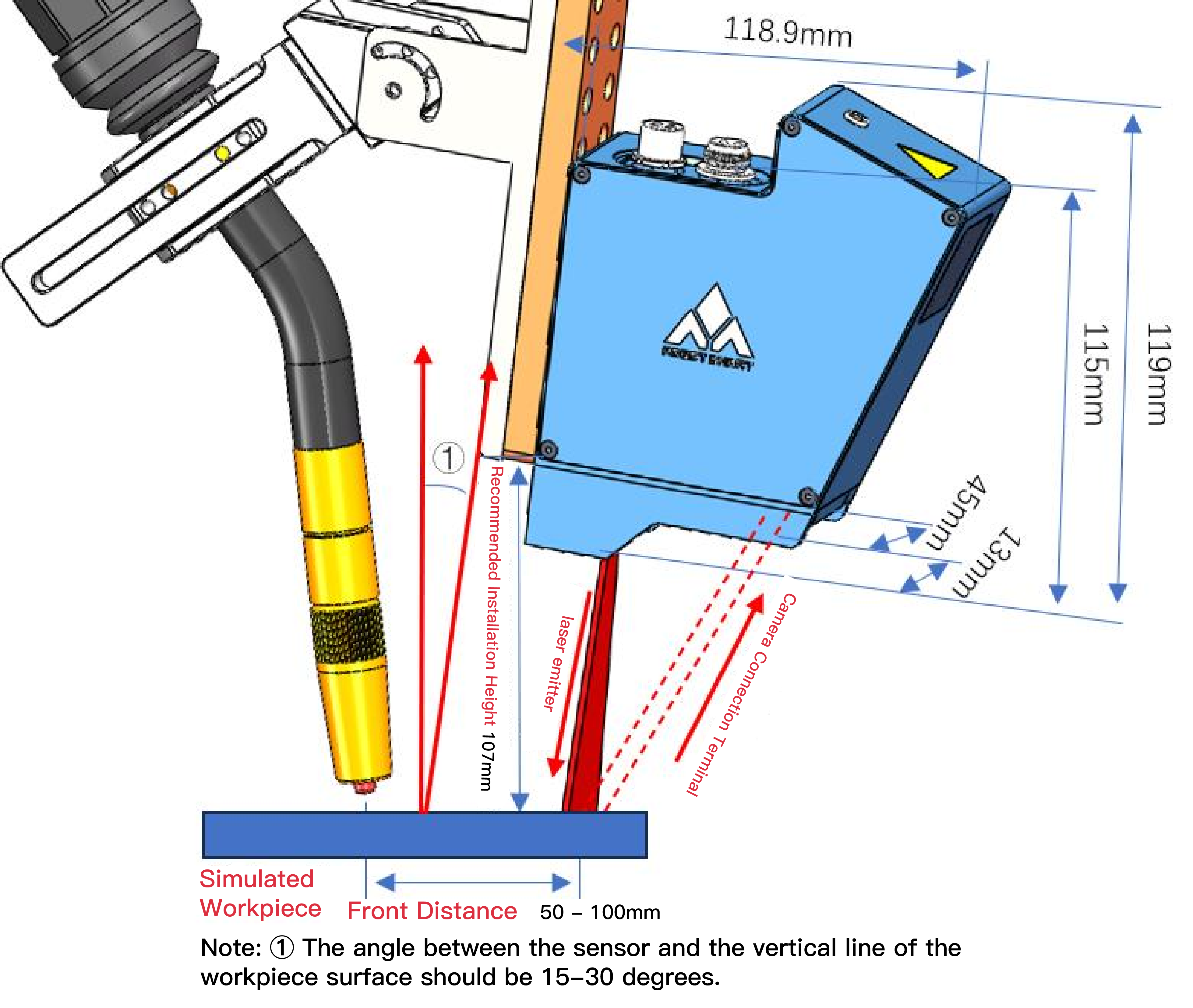
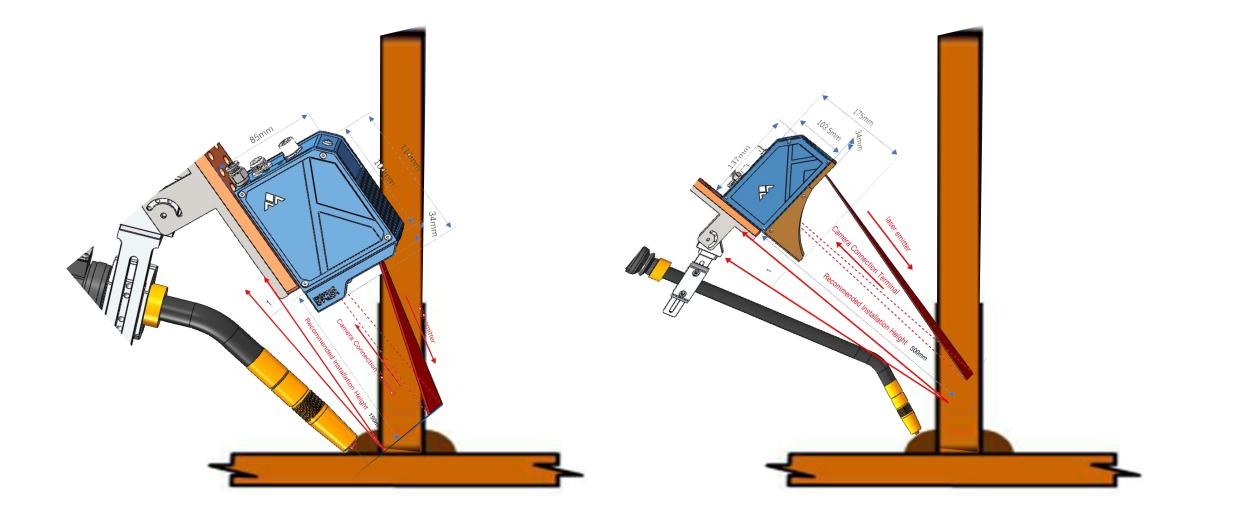
Најдобриот набљудувачки растојание е околу 107mm.
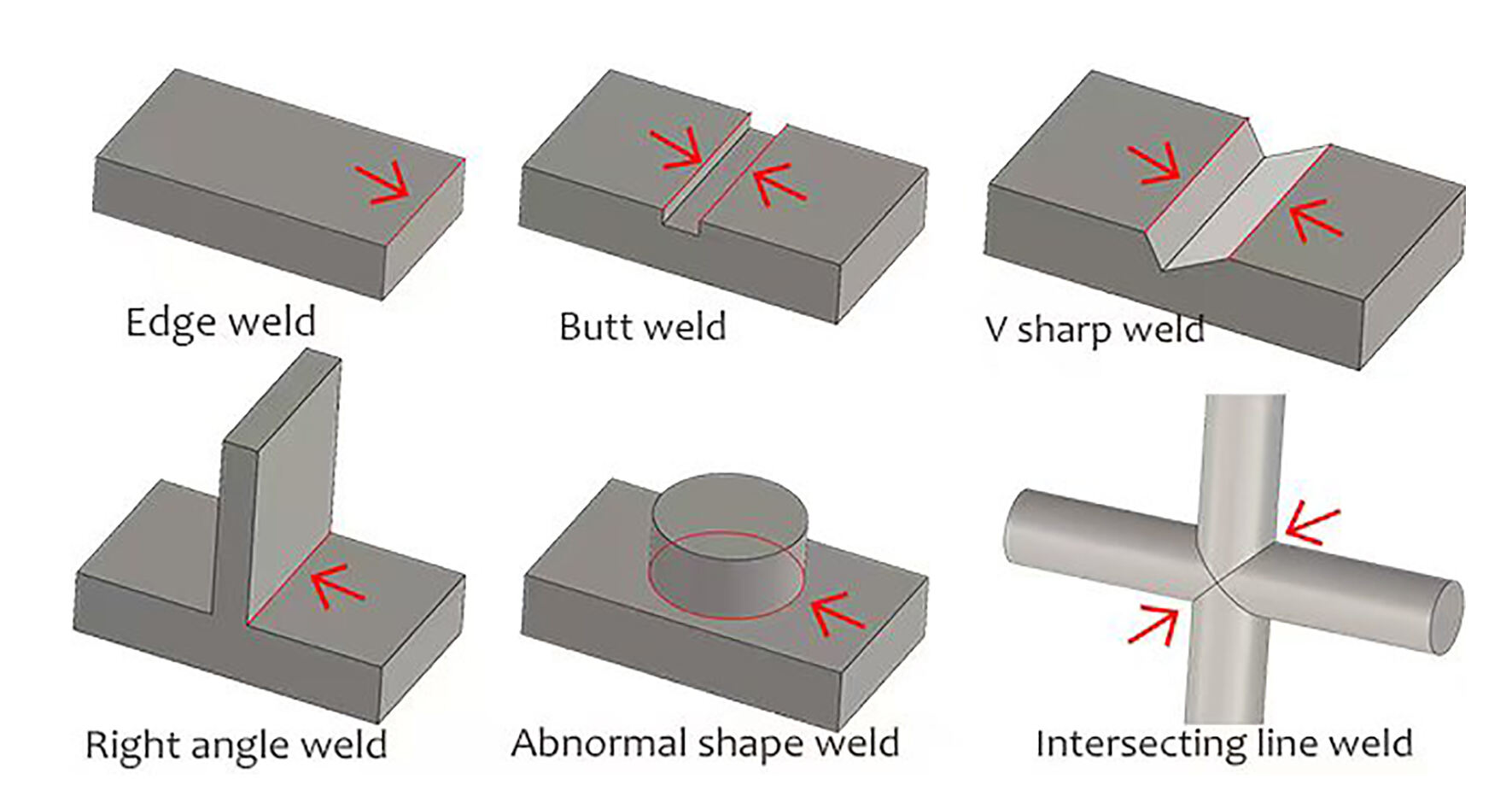
Тип на поддржувачка сварка
Сварка со V-обликова џепче
Аголна сварка
Сварка со загинување
Спојувачко врвежење
Преклопно врвежење, итн.
Мали димензија, висока прецизност, брзина на рефлекс. Одговара за индустријата на челичните конструкции и градитеелската техника.
Ве молиме, изберете го типа разбирачка според стварниот опсег на примената, за да се избегне колизија на делот со сензорот, општиот тежински капацитет на роботот обично е 20КГ.
Кооперативен партнер

Поддршка за роботска марка







