 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Dzelzs struktūru svārstīšanas robotu stacijas ar zemes riteņiem

Robotu zemās riteņa tips ar savienojumu ir aprīkots ar inteliģentu Friendess ne-tehnisko svāršanas sistēmu un lielu vizuālo attāluma spraugas sekotāju. Tas var tieši importēt 3D modela failus no Tekla, SolidWorks vai UG, tieši pielāgot svāršanas procesa parametrus, automātiski identificēt precīzo svāršanas vietu un ģenerēt labāko optimizēto svāršanas procesu svāršanai.
Zemās riteņa gaitas ass palielina garuma virziena pielāgojamību. Robots var saistīties ar zemām riteļiem, lai vienlaikus svārstītu garākas spraugas, un darba stacijas var strādāt pa abām rieklas pusēm. Tas galvenokārt tiek izmantots H šķūņa ripstu plāksnēm, kolonnas pamata plāksnēm, spēra atbalsta plāksnēm, konsolēm un citiem konstrukciju elementiem.
| Robots | 1 Fanuc robota komplekts |
| Izvēles svāršanas avots | Aotai svāršanas mašīna un tās papildinājumi vai Megmeet svāršanas mašīna un tās papildinājumi |
| Svāršanas sistēma | MINYUE mācību bez nepieciešamības offline programmēšanas svāršanas programmatūra, MINYUE lasers redzamais sekotājs. |
| Piemērojamie scenāriji | Derīgs gabaliem ar plecu plāksnēm, korbeliem, mazākiem konstrukcijas elementiem utt. Pašlaik to var izmantot H-formāta galvenajos gredzējos un sekundārajos gredzējos metāla struktūrās, mazu un vidēju platnes vienību kopumos kuģu tiltpavadoņos, iekārtu H-formāta stiepļos, iekārtu platformas gredzējos un citās struktūrās. |
| Sistēma pistoles tīrīšanai | SC220A sistēma pistoles tīrīšanai |
| Grundu riepu garums | 6 metri (izvēle pēc lietotāja) |
Sistēma pistoles tīrīšanai
SC220A pistoles tīrīšanas stacijas ir ierīce robotu vārstošanas pistoles tīrīšanai. Tas tiek izmantots, lai automātiski noņemtu vārstošanas pistoles šķiedras, automātiski atgužņuotos žigliņus, kā arī aizsargātu vārstošanas pistoles spraugu un kontaktstieņu, uz ilgāku termiņu paplašinot vārstošanas pistoles dienestam un taupot naudu. Samaziniet patēriņa preču izmaksas, uzturiet labu vārstošanas kvalitāti un uzlabojiet vārstošanas efektivitāti. Vienkārša darbība un viegli lietojams.
Priekšrocības no jomu tīrīšanas stacijām: 1. Jomu tīrīšanas laiks ir īss, un sistēmas pieejamība ir augsta. 2. Automātiski pabeidz jomas tīrīšanas procesu bez rokas darbības. 3. Novērš kvalitātes problēmas, kas izraiztas piesavienošanas process kontaminācijas dēļ. 4. Komplektēts ar robota TCP kalibrēšanas sprādziņu.
Robota varsnes programmatūra
Programmatūra var automātiski izvilkt varsnes no zīmējumiem bez varsnes atzīmes, samazinot cilvēka iejaukšanās darbu. Ar augstas veiktspējas 3D dzinēju un robota kontrolieri tiek simulēti un pārbaudīti automātiski izveidotie punkti, lai novērstu satursniedzumus reālajā darbā.
Un bez zīmējuma tips, 3D skenēšana pretējā modelēšana, ātra 3D zīmējumu radīšana, robotu varsnes trajektorijas automātiska radīšana, varsnes trajektorijas optimizācija, attiecīguma vizualizācija, varsnes sprādziņa satursniedzuma automātiska noteikšana.
LDWP-305 lasers līdzeklis
LDWP-305 ir inteliģenta līnijas skenēšanas svārstības jutītājs. Tas iegūst svārstības loma profila kontūru informāciju, izmantojot līnijas laserskenēšanu, un vadās robotu vai svārstības mašīnu, lai automātiski pabeigtu svārstību. Attēla ieguves, apstrādes un svārstības identifikācijas funkcijas tiek veiktas jutītāja iekšienē bez nepieciešamības ārējam datoram. Tas ir ar augstu integrāciju un samazina sistēmas kopējos tīmekļa izmaksas. Tā ir atbalsta līdz ar elektrodu gaismu un attapu, inteliģenti identificē svārstības spraugas, un ir viegli lietot. Tas ir ar eleganti struktūru, kompakta izmēra, augstu pieejamību, un bagātu veidu. To var atlasīt un izmantot atbilstoši pielietojuma scenārijam, un var tikt uzskaitītas vispiemērotākie parametri.

Priekšrocība
1.Atbalsta neatgriezenisku mācību dažādiem produktiem, piemēram, siltumslāpekļa plāksnēm, karkasa gredzenu, stabiņiem, tilpniekiem un plāksnēm;
2. Nav nepieciešams marķēt svārkus projektēšanas posmā, un mērķa svārku novietojumu var automātiski izvilkt, importējot 3D zīmējumus;
3. Nav nepieciešama cilvēka iejaukšanās, robots automātiski veic darbības, piemēram, nulles atgriešanos, pāreju, pozīcijas meklēšanu, svārkus, skaitīšanu un pistoles tīrīšanu;
4. Nav nepieciešams vietējs darbs, programmu var radīt jebkurā brīdī un vietā, tālu attālumā nosūtot robotam ražošanai saskaņā ar noteikto laiku;
5. Pašizstrādātais bezkontaktu programmēšana, 1:1 robota kustību simulēšana, iepriekš novērš robota traucējumus un izvairās no satricinājumiem;
6. Digitālo dvoļu tehnoloģija var tūlīt parādīt vietas robota trajektoriju, svārku spriegumu, strāvu, ātrumu un citus ražošanas datus.
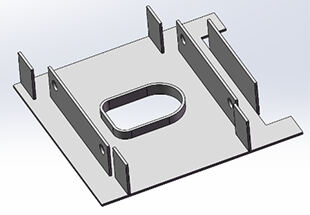
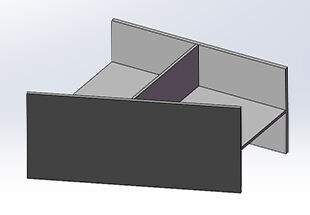
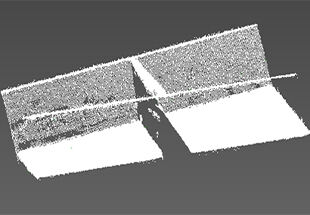
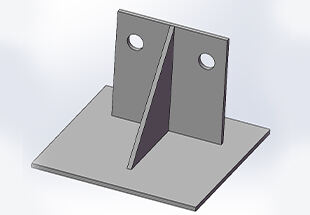
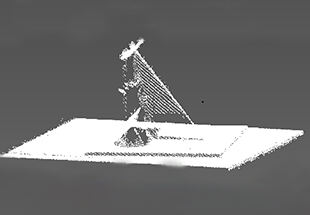
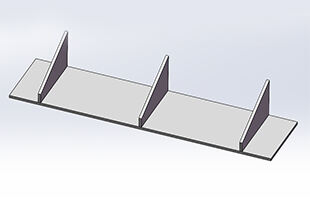
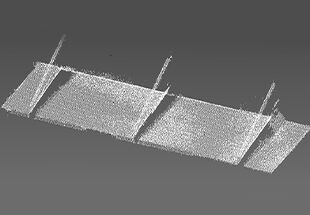
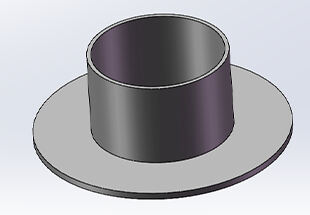
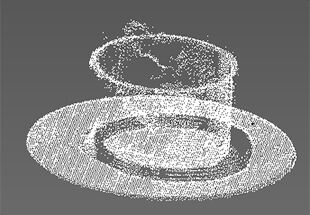
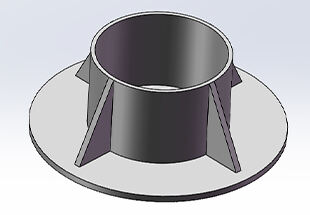
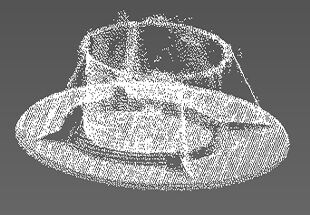
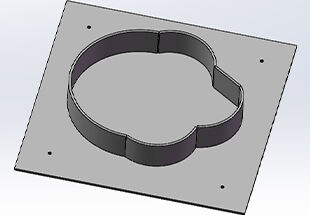
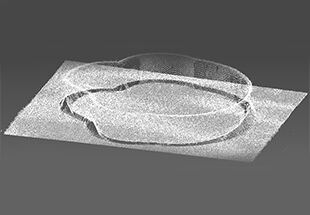
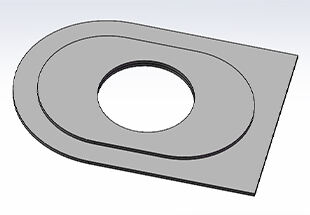
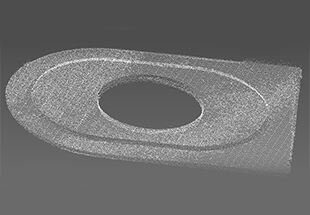
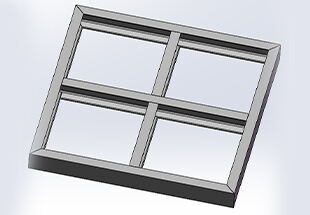
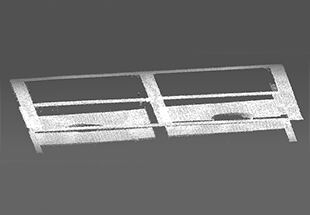
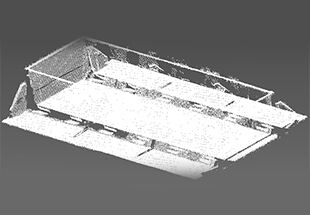
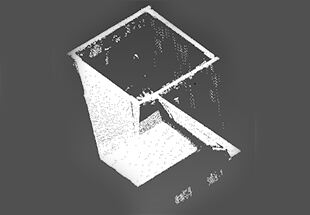
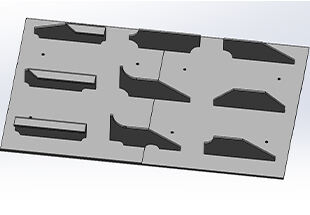
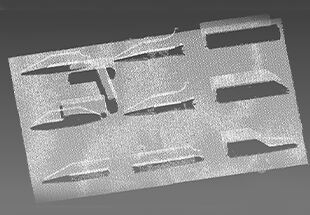
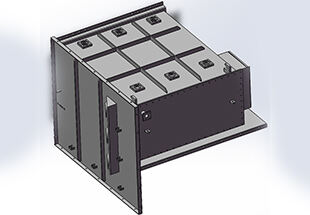
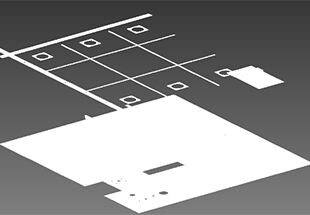
| Nē | Darba gabala tips | Darba gabala modelim attēls | Darba gabala punktu mākoņa attēls |
| 1 | H trūsnis (ieskaitot savienojošos svārkus) | 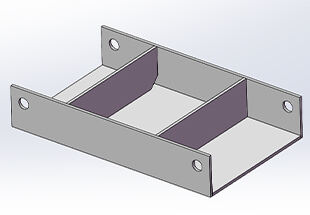 |
 |
| 2 | Plāksnes vienība |
 |
 |
| 3 | Dzelzs korbels |
 |
 |
| 4 | Bastnītais |
 |
 |
| 5 | Purlina atbalsta plāksne |
 |
 |
| 6 | Apļa rūtiņa pamats |
 |
 |
| 7 | Krustveida apļa rūtiņa pamats |
 |
 |
| 8 | Sieviešu virsma |
 |
 |
| 9 | Divkārtējais slānis |
 |
 |
| 10 | Kanāla gredzens |
 |
 |
| 11 | Dubultpietvēruma svītulis | 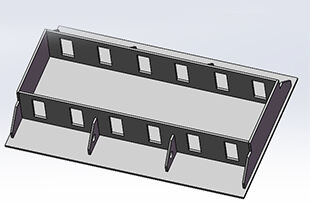 |
 |
| 12 | Kastes gredzens |
 |
 |
| 13 | Neregulārs līknes savilkšanas apvienojums |
 |
 |
| 14 | Transformatora tankis |
 |
 |





