 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



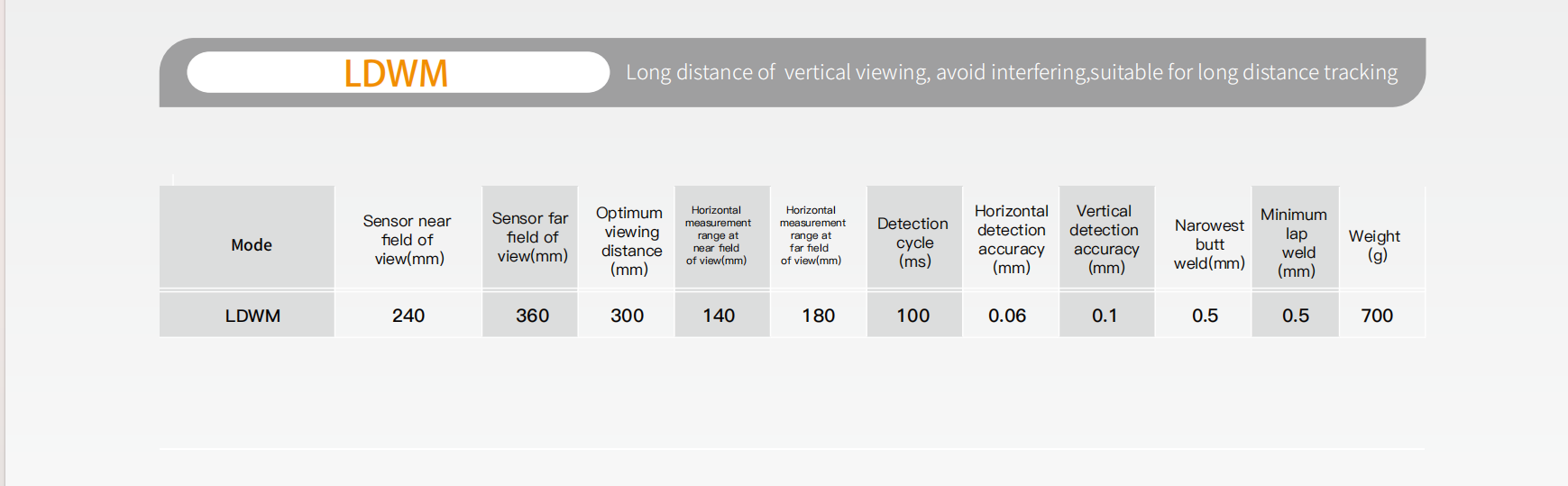
LDWM Laserio šluosties sekimo jutiklis
Su pozicijos nustatymu, realaus laiko sekimuoju, skenavimu ir automatina suvaržymo funkcija
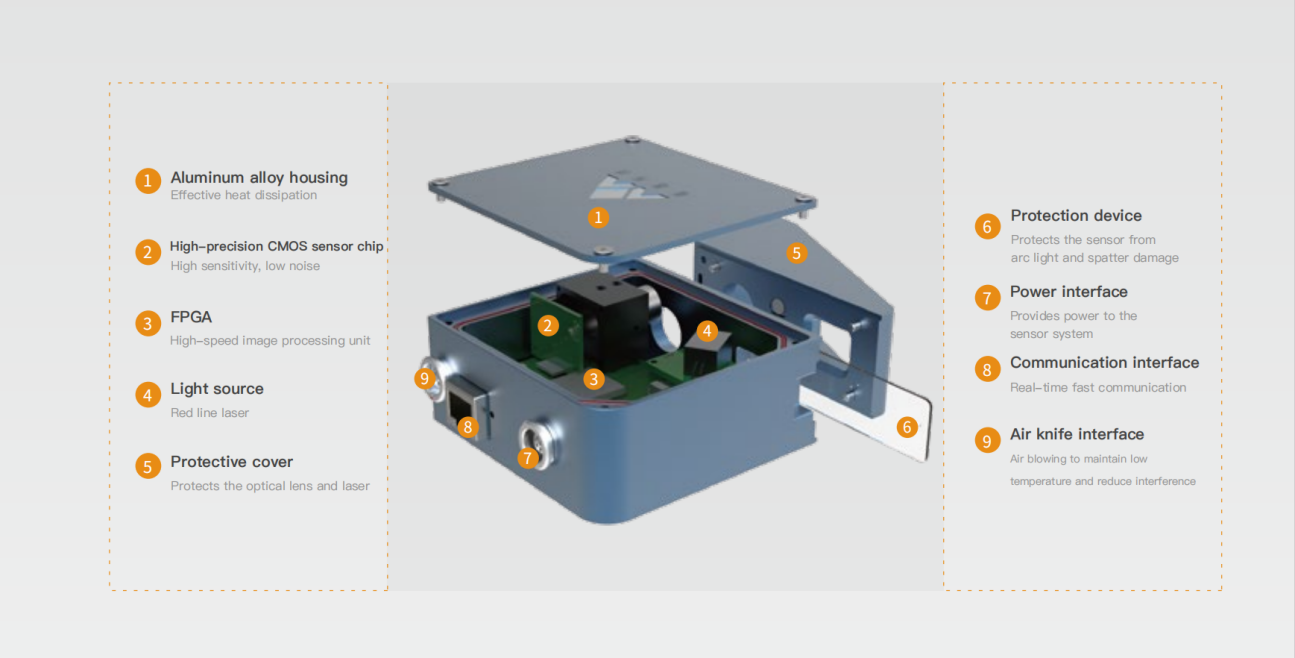
- Apžvalga
- Palaiko robotų prekės ženklus
Lazerinis virsmos sekimo jutiklis naudoja laserį, kad apšvistų virsmo jūros paviršių ir sukurtų lazerinį šviesos juostą, kuri yra gaunama ir vaizduojama aukštos raiškos kameros. Algoritmų apdorojimu, virsmo jūros trimačiai bruožai transformuojami į struktūruotą informaciją, įskaitant virsmo sąjungos koordinates, nesutapimą, tarpus ir pan. Ši informacija perduodama robotui valdytojui, kuris suteikia robotui reikalingus trajektorijos ir technologinius parametrus virsmui, vadovaujantis robotui virsoti arba koreguoti darbo dalies nuokrypius realiu laiku, pasiekiant idealų virsmo darbą. Palyginti su kitomis sprendimais, lazerinis jūros sekimas turi privalumų – jis yra nekontaktinis, turi aukštą tikslumą, greitą speeed ir gera pritaikomumo gebėjimus.
Jutiklis naudoja linijinį struktūrizuotą šviesos matavimą, kuris turi greitą linijinių vaizdų greičio, nekontaktinę ir nemechaninę judėjimo savybę; Galinga pritaikomumas, gali išvesti svarkos jūros parametrus; Visiškai įstatyta sistema su išoriniais pramoniniais valdymo kompiuteriais ir daug kitų privalumų, plačiai naudojama skirtingose automatinėse svarkos sistemose. Nepaisant svarkos proceso, mes galime teikti patikimą palaikymą ir stabilų veikimą, užtikrinant puikius rezultatus skirtinguose svarkos scenarijuose.
Sniegiklis tinka sudėtingiausiems taikymams, nes jis yra neprijaučiamas išskirtinai šviesos, vandens ir drabužių (IP67) bei nepriklausomas nuo elektromagnetinio spinduliuotės (EMC).
Su galinga funkcija.
01. padėties ir nuokrypio korekcija
Funkcija pozicionavimo ir nuokrypio koregavimo naudojama įvairių darbo dalių su tuo pačiu modeliu, bet skirtingais tolerancijomis, sulankstinti sudedamųjų elementų varžymo scenarijuose. Ši funkcija užtikrina, kad keičiant darbo dalis nereikia rankinio įsikišimo, o robotas vadovaujamas pozicionavimo ir nuokrypio koregavimo sistema, siekiant tikslaus varžymo.
Dvi-taksnis pozicionavimas tinkamas tiesinei linijinei 2D poslinkio varžymui.
Daugiatakštis pozicionavimas tinkamas daugiau nei vienam segmentui skirtoms 2D poslinkio varžymams.
Segmentinis pozicionavimas tinkamas daugiau nei vienam segmentui skirtiems 3D poslinkio varžymams.
02 Realusis laiko stebėjimas
Realusiojo laiko stebėjimo funkcija naudojama varžymo scenarijuose, reikalaujančiuose aukštos našumos ir nekenksmingo erdvės sutrikdymo. Jutiklis yra fiksuotas atsižvelgiant į varžymo pabūklą, o varžymo pabūklas automatiškai pritaiko varžymo kelį pagal 3D koordinačių duomenis.
03.Skanavimas ir automatinių varžymas
Funkcija skenavimo ir automatinio suvaržymo leidžia jutikliui pirmiausia rinkti geometrinius duomenis apie suvaržymus. Ši funkcija tinka aukštos atspindinio, siaurų suvaržymų erdvesių ir sudėtingų suvaržymų scenarijams.
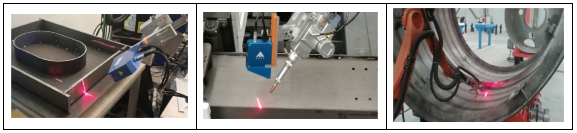
Lazerinis suvaržymo stebėjimas
Lazerinis suvaržymo stebėjimas gali aptikti aukštus, žemus, kairės ir dešinės pusės suvaržymų nuokrypius.
Gali aptikti suvaržymus su mažais tarpais.
Išspręsta plonų plokščių suvaržymo stebėjimo problema.
Optimalus matavimo atstumas yra apie 300 mm.
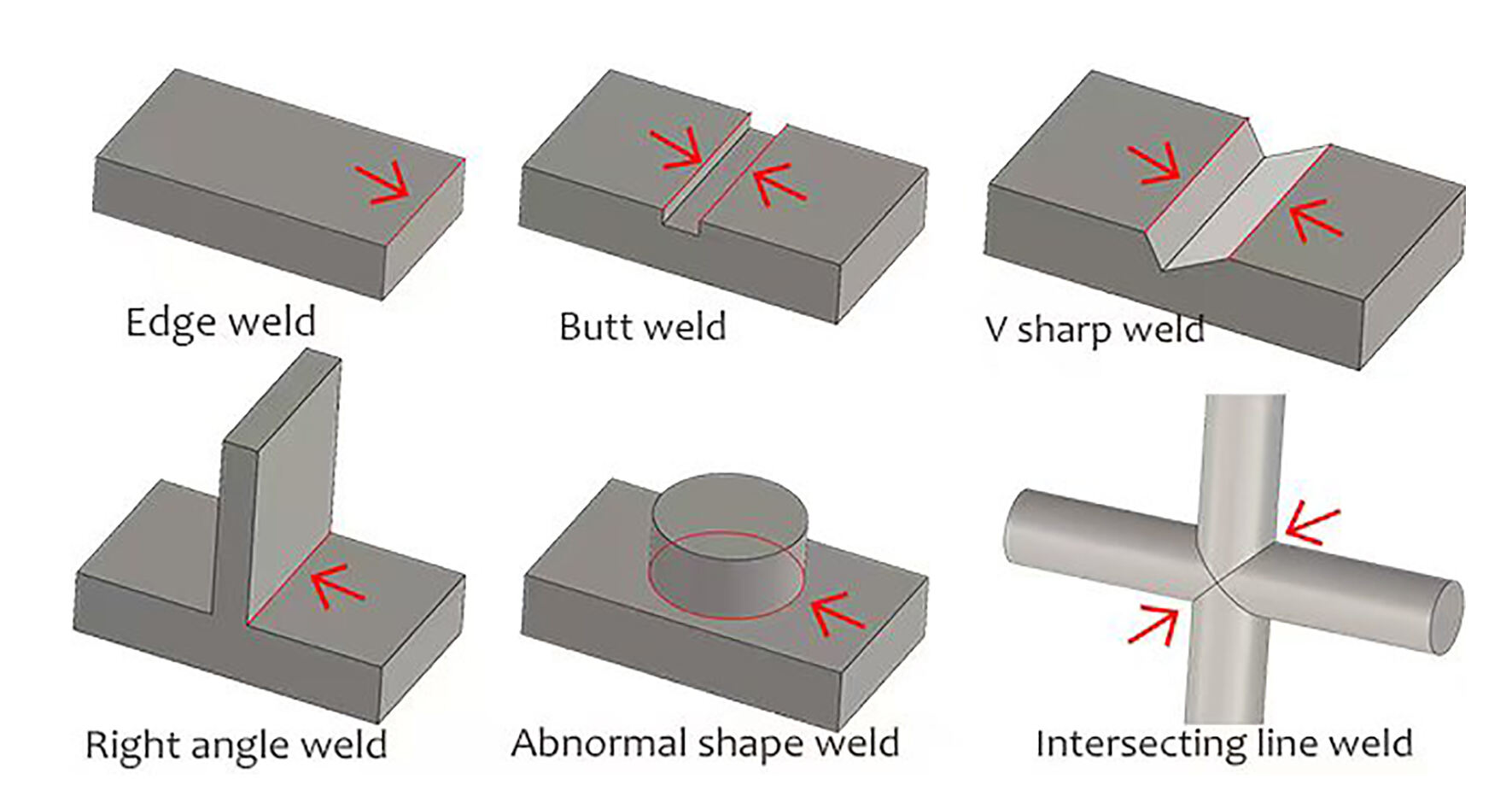
Palaikomas suvaržymo tipas
V-formos suvaržymas
Kampinis suvaržymas
Suvaržymas su užgriuvimu
Sujungimo sviedinys
Plokščių sviediniai ir kt.
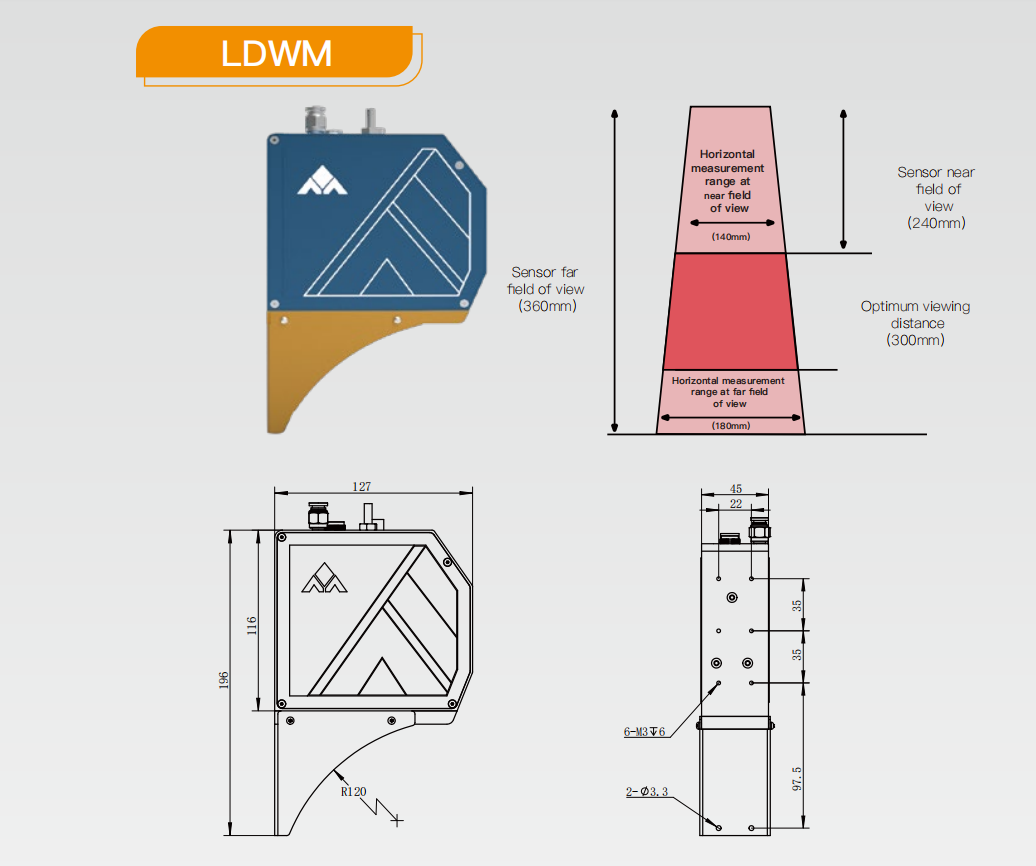
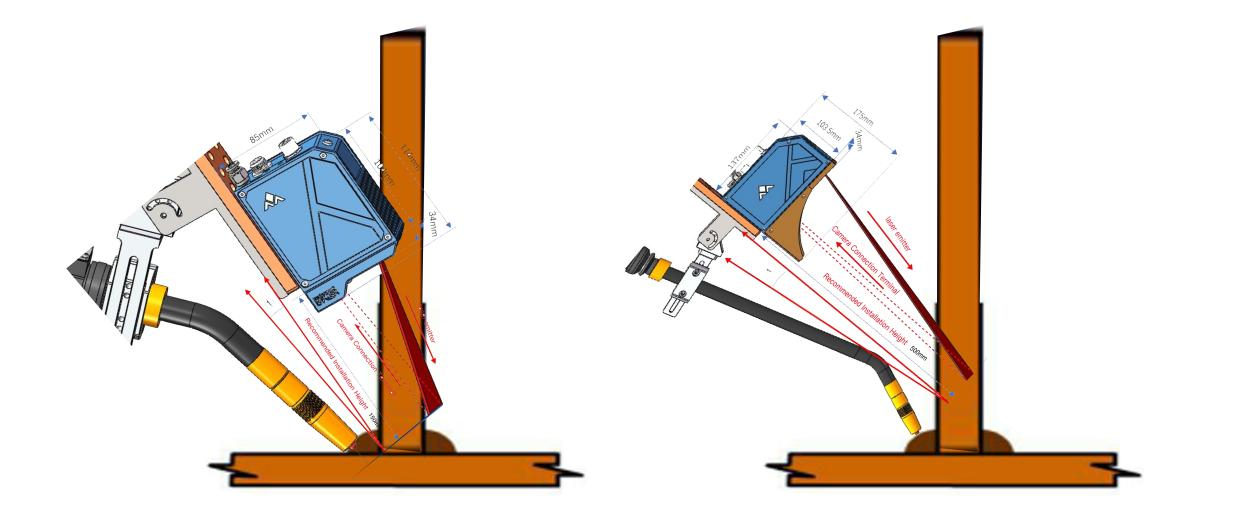
Ilgas vertikalus rodymo atstumas, plačiasis vaizdas, išvengti traukimo, tinka stalo konstrukcijoms ir statybos technikai. 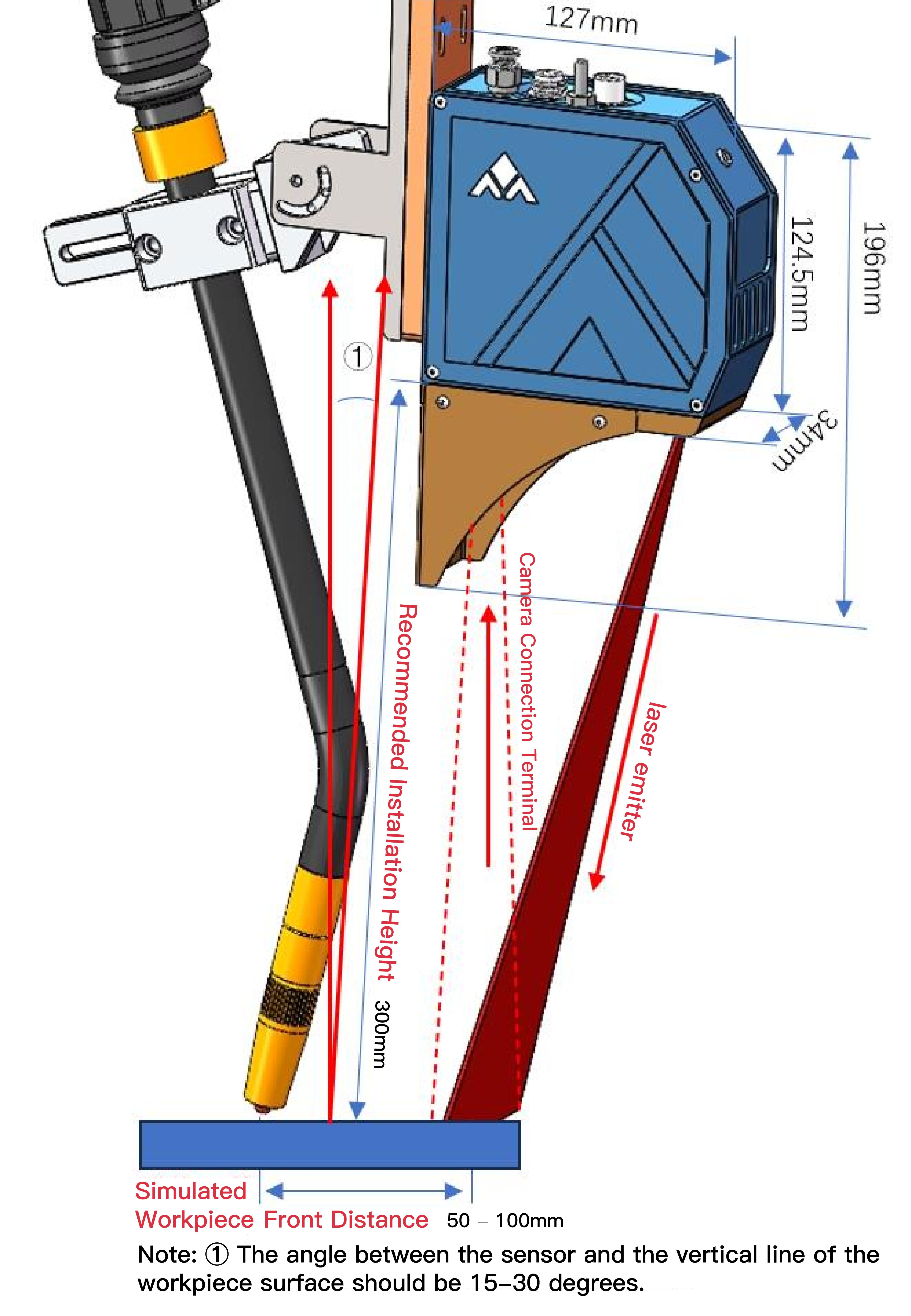
• Pasirinkite tipą pagal tikrąjį naudojimo aprangą, kad išvengti darbo objekto sutrikimo su jutikliu, robotui paprastai reikia 20 kg kruto.
Bendradarbiavimo partneris

Palaiko robotų prekės ženklus







