Kas yra suvamzdžiavimo robotai? | Išsiplėtinis cilindras | - YouTubeKas yra suvamzdžiavimo robotai? | Išsiplėtinis cilindras | YouTube Jie sukurti daryti greičiau ir geriau, ką žmogus galėtų padaryti vienas. Yra daug įmonių, kurios gamina tuos robotus suvamzdžiavimo pramonėje, vienas pavadinimas išskiriasi, o tai pavadinimas yra MINYUE. Jų suvamzdžiavimo robotai yra šiuolaikiniausi ir transformuoja bei pagerina robotinė punktinių suvaržymų technologija pramonė
MINYUE suvaržymo robotai leidžia gaminiams gaminti kaip niekada anksčiau. Šie robotai yra sukurti būti greitais ir tiksliais. Tai reiškia, kad įmonės gali pagaminti daugiau produktų mažiau laiko. Tai yra puikios naujienos verslui! Kai jie gali gaminti daugiau daug greičiau, jie gali uždirbti daugiau pinigų ir išplėsti savo veiklą. Įmonės siūlo daugiau produktų ir pritraukia daugiau pelno, atitinkant poreikius, kuriuos sieja su tuo, ko nori žmonės, labai sėkmingai.
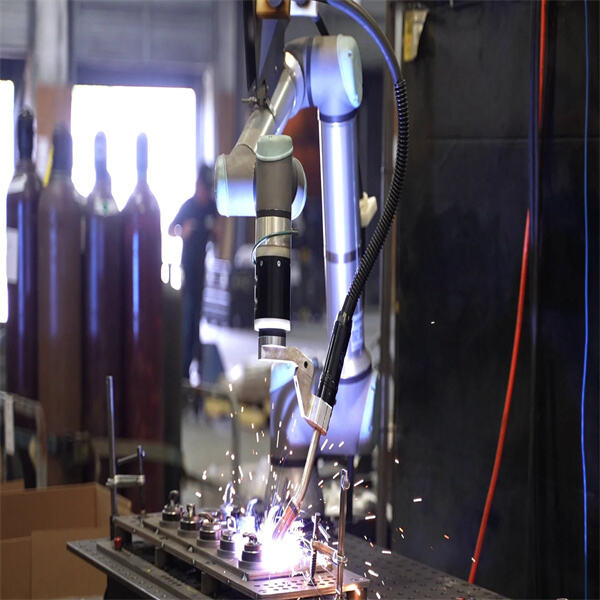
Tikrovėje robotai kelia revoliuciją tose srityse robotinė suveldymo sistema įvykdyta šiandien. Rankinė suvilkimo technologija buvo vienintelis pasirinkimas tuomet, ir tai buvo labai laiko užtrąsama ir jaudinga procedūra. Dabar šie nuostabūs robotiniai įrenginiai gali atlikti darbą daug greičiau ir geriau nei žmonės. Robota taip pat yra saugesni, nes jie gali dirbti srityse, kurios gali būti pavojingos žmonėms. Jie taip pat gali kelti karštus medžius ir dirbti mažuose erdvėse. Ir MINYUE yra šio ramiojo pokyčio pradžioje, statydama inovatyvius įrangą, kuris revoliuciją kelia visą suvilkimo operaciją.
Yra greitas augimas robotinio varžymo rankojo pramonė, ir įmonės privalo greitai prisitaikyti prie pažangos. Tą padeda MINYUE. Todėl jie nuolat stengiasi gaminti naujus ir geriausius svarciam automatizacijos robotus, kurie atitiktų įvairių pramoninių sektorių poreikius. Jų robotai yra universaliai ir gali būti pritaikomi įvairioms užduotims, todėl jie yra labai naudingi bet kurioms įmonėms, kurios reikalauja svarčių darbų. Nuo baldų iki automobilių gamybos, MINYUE gali sukurti viską, kas galite susimanyti duomenų srautuose.

Grįžkime prie protingų svarčių robotų, keičiančių gamybos taisykles. Dėka MINYUE puikiai veikiančių mašinų, įmonės gali supaprastinti savo svarčių procesus. Tai sumažina klaidas ir laiko visus procesus suderintus. Robotai, kurie moko save iš aplinkos, gali būti naudojami įvairiose medžiagose ir aspektuose. Jų universališkumas taip pat jais padaro vertingą priemonę įvairiose gamybos darbe. Jie gali dirbti su metalais, plastiku ir kitomis medžiagomis, todėl jie yra labai naudingi daugelyje pramoninių šakų.

MINYUE specializuojasi gamindama aukščiausios kokybės suvamzdžiavimo robotus, turinčius aukštą tikslumą darbdaroje. Jų mašinos yra sukurtos, kad gamintų produktaus kokybę. Tai yra svarbu įmonėms, kurias reikia gaminti sudėtingas dalis arba tos, kurios turi būti idealios. Aukšta kokybė yra tai, kas padaro produktus ilgoveičiais ir veiksmingais. Jie teigia, kad niekada nesustojama mokytis naujų technikų. Taigi, MINYUE robotai visada veda suvamzdžiavimo srityje. Šios protingos mašinos rodys kelionę link gausiau ateities suvamzdžiavime.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK




