Ką lazeriniai jutikliai daro matant atstumus ir objektų aptikimui? Jie naudoja lazerius, kurie yra panašūs į nežiūrimus rulerius, kurie gali tiksliai matuoti daiktus. Taigi naudodami lazerinius jutiklius, dabar žinome, kiek toli yra objektas nuo mūsų – idealiai, jie neturi jausmų ar naudoti normalų matavimo šnirklę. Kaip veikia lazerinis jutiklis? Spindulys grįžta į jutiklį, kai jis susiduria su objektru. Tada lazerinis jutiklis atstumo matavimui kaip ilgai šviesos spindulys grįžo. Tai pasakoja mums, kiek toli yra objektas. Tai kažkur taip pat panašu, kaip dramblys naudoja eholokaciją, kad orientuotųsi tamsyje. Drabliai išsiskiria garsus, ir kai garsi grįžta, jie žino, kur yra aplinkinių objektų. Lazeriniai jutikliai padaro kas nors labai panašaus, tik jie remiasi šviesa, o ne garso!
Kai gaminiame daiktus fabrikose, kur yra pagaminta daug daiktų, ypač svarbu būti labai tiksliai. Kai stotelelės nedaroma ir dalykai neatsidedami ten, kur turėtų, tai kelia problemų. Laserinių jutiklių pareiga yra užtikrinti, kad stotelelės ir dalys judėtų į tinkamus vietas. Tokios tikslios nustatymo rodikliai leidžia efektyviau ir tiksliau kurti produktus, kas yra būtina sektoriuose, kur net maži klaidos gali kainuoti daug. Fabrikos naudoja didelio greičio lazerinis jutiklis tiksliais produktais ir mažina atliekas.

Atstumo matavimui, pvz., koridoriaus ilgio ar pastato aukščio, naudojame pramoninis laserinis jutiklis jie yra daug tiksliau už standartinius matavimo juostas. Galime greitai ir lengvai matuoti ilgus atstumus naudodami laserinį jutiklį. Tai taip pat užtiko daug laiko ir neramumų darbo vietoje, kai sunkūs matavimo prietaisai kelia kliūčius darbuotojams, bandantiems atlikti savo darbą. Laseriniai jutikliai turi aukšto tikslumo, todėl galime pasitikėti matomaisiais, kurias jie pateikia, dėl ko jie tapo labai paplitę įvairiose situacijose.

Todėl robotai yra neįtikėtini, jie gali daryti tai, ko mes negalime. Pavyzdžiui, jie gali eiti į erdvę, kurioje yra per pelninga žmonėms. Laseriniai jutikliai leidžia robotams "matyti", kas yra aplink juos, kad jie nesuvaržytų į objektus ar žmones. Tai yra kritinis gebėjimas užtikrinti saugumą pacientų grupėse. Jei robotas turi laserinė jutiklių kamera savo sistemoje, tai reiškia, kad jis tikriausiai gali eiti be susidūrimo su objektais. Tai leidžia robotams bendradarbiauti su žmonėmis fabrikose, sandėlyse ir net ligoninėse, dėl ko jie yra labai naudingi įvairiose rolėse.
Lazeriniai jutikliai yra naudojami tiek daugelyje inovatyvios būdų, kad netgi galime net nesuprasti. Pavyzdžiui, jie leidžia automobiliams suvaldyti kitus transporto priemoneles ir išvengti kelių nelaimių. Jutikliai leidžia automobiliams jauti, kaip artus yra kiti transporto priemonės – tad jie gali priimti saugias valdymo sprendimus. Jie taip pat yra naudojami sveikatos priežiūroje stebėti pacientų gyvulesnės rodiklius, nesukant jų. Tai ypač naudinga tvarkant pacientus, kurie gali būti pažeidžiami ar reikalauja apsaugos nuo patogenų.
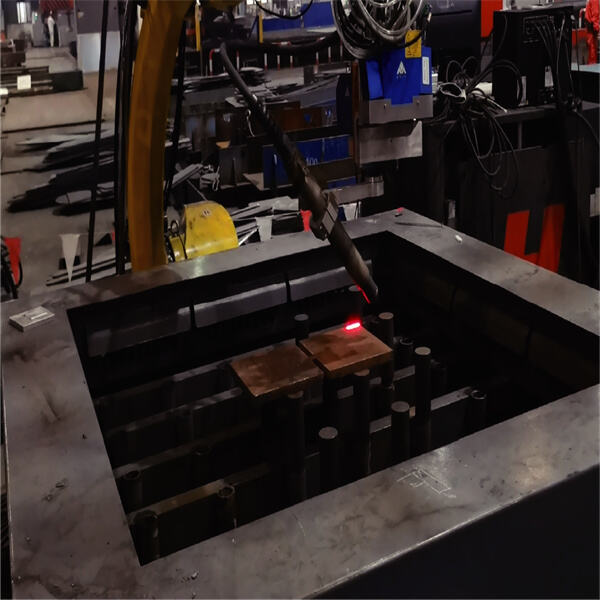
Naudojant funkcijas, skirtas rasti ir sekti, skenuojant šovinius sutriktimus, patvirtinti šovinių sutriktimų vietą ir informaciją, ištaisyti šovinių sutriktimų vietą tarp 3D skaitmeninio modelio brėžinio ir faktinio darbo gabalo, bei išspręsti problemą dėl nelygiaverčių šovių dėl įvesties medžiagų klaidų ir šiluminės deformacijos.
Beijing Minyue Technology Co.,LTD, kaip pasaulio lydere besijaučiančio aukštos technologijos įmonės pramoninių robotų neįmokomosios inteligentaus taikymo srityje. Specializuojamės flexibiliojo inteligento gamyboje su mūsų savarankiškai sukurtu RobotSmart - Inteligentinis sprendimų priėmimo sistema, SmartVision - Dviejų akinių struktūrizuoto šviesos vizija sistema, ir SmartEye - Laserinė vizija jūros sekimo sistema. Teikia naujausią kartą inteligentinių robotų suvilkimo ir pjovimo sprendimus.
Greita, tikslu, visiškai Be-Programavimo, aukšta efektyvumas ir aukšta tikslumas. Tai išspręsta trisčio mokymo proceso tradicinių robotų problema ir sumažina mokymosi proceso dėltoją.
Siūloma galinga varomųjų robotų priešinė įkrovos, kraštine įkrovos, atvirkštinės įkrovos, jumties montavimo, gebančių inteligentiniam kelio planavimui keliems robotams, keliems išoriniams aksiams ir pozicionieriams bendradarbiaujant. Galima realizuoti robotų judesio simuliaciją, sutrikimų aptikimą, vienatvičių išvengimą ir aksių ribų aptikimą.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK








