 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


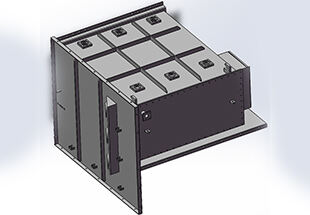
Statio Terrae Rails Type I Robot Sutorius Intelligentiae pro structura ferrea

Robotum sutorium cum itinere terreno praeditus est systemate sutorio intelligenti amico non-technico et magno visu distantis tractatoris fissurarum. Potest importare directe files modelorum 3D Tekla, SolidWorks vel UG, congruere directe parametris processuum suturae, identificare automate locum exactum suturae et generare optimum optimatum processum suturae pro sutura.
Axis ambulatorius cum itinere terreno augeit aptitudinem in directione longitudinis. Robotus potest coniungi cum itinere terreno ut longiorem fissuram simul suturet, et statio operativa potest operari ex lateribus sinistris et dextris itineris. Usum habet praecipue pro sutura tabularum costarum H, tabularum basium columnarum, tabularum supportium purlin, corbellorum et aliarum structurarum.
| Robot | 1 set Fanuc robot |
| Optionale fontem potentiae suturae | Aotai macchina suturae et eius accessoria vel Megmeet macchina suturae et eius accessoria |
| Systema suturae | MINYUE software programmationis offline sine doctrina, MINYUE systema visionis laser tractationis. |
| Scenaria applicabilia | Conveniens pro tabulis crurum, partibus corbellis, partibus structuris parvis et aliis. Nunc potest uti in trabibus principalibus et secundariis formae H in structuris ferreis, unitatibus laminarum parvulis et mediocribus in pontibus navium, columnis laminarum formae H praeparationis, trabibus platformae praeparationis et aliis structuris. |
| Systema purgationis hastarum | Systema purgationis hastarum SC220A |
| Longitudo itineris terrae | 6 metra (optionale secundum usorem) |
Systema Purgationis Hastarum
Statio purgationis hastarum SC220A est instrumentum pro purgando robotorum hastas coniunctionis. Uti ad purgandum automaticum scoriae coniunctionis hastae inter roboticiam coniunctionem, ad sectendum filos automaticum, et ad tuendum os hastae et apex contactus, prolongans vitam usui hastae et parcens pecuniis. Minuit sumptus consumabilium, conservat bonam qualitatem coniunctionis, et meliorat efficientiam coniunctionis. Operatio simplex et facilis ad usum.
Vantagia stationum pro mundatura gladi: 1. Tempus mundandorum gladi est breve et systema habet altam disponibilitatem. 2. Complectur processum mundandi gladium automate sine operatione manualem. 3. Praevenit problemata qualitatis causata per contaminationem inter utendum ad conflatandum. 4. Muniri cum acu calibrandi robotis TCP.
Software conflatandi robotis
Software potest automatico extractio conflationum ex chartis sine notatione conflationis, diminuendo laborem participationis manualis. Cum alto-praesentia motori 3D et controllore robotico, puncta creata automate simulantur et verificantur ut vitent collisiones in opere vero.
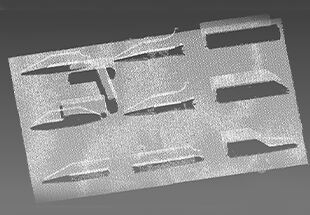
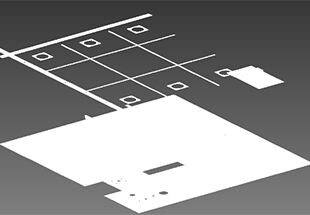
Et sine typo delineationis, Scanning 3D inversus modeling, celer generatio delineationum 3D, automatica generatio trajectoriae roboticae fusoriae, optimizatio trajectoriae fusoriae, visualisatio status, et automatica detectio collisionis fusoris.
LDWP-305 tracer laser
LDWP-305 est sensus intelligentia scansionis linearis fissurae soudagii. Per scansionem laser linearis, colligitur informatio contournis sectionis fissurae soudagii, et dirigit robotem aut machinam soudandi ad automaticam consummationem soudagii. Functiones acquisitionis imaginis, processus et identificationis fissurae soudagii perficiuntur intra sensor sine necessitate computatrum externorum. Habet integrationem altam et reducit costum hardware systematis totius. Resistentiam ad lumen arcus et spatter, intelligenter identificat fissuras soudagii, et est facilis in operatione. Habet structuram eximiam, dimensionem compactam, accessibilitatem altam, et genera divisa. Potest selectari et uti secundum scenarium applicationis, et parametri optimi possunt customizari.

Commodum
1. Supportat non-doctrinam pro variis productis qualia sunt placentae compositae, trabes reticulatae, brackets, divisiones pontis, et stands placenta;
2.Ne est necesse signare coniunctiones in stadio designandi, et locus coniunctionis potest esse automatico extractus per importationem datorum 3D;
3.Nulla interventio humana requiritur, robot automatico perficit actiones tales qualis est regressio ad initium, transitus, inveniendi locum, coniungere, numerare, et purgare arma;
4.Nulla operatio in situ requiritur, programma potest generari quandoque et ubicunque, et remoto mitti ad robotam pro productione secundum tempus praescriptum;
5.Programmata offline inventa, simulatio 1:1 motuum robotarum, vitat interferentiam robotarum ante et vitat collisiones;
6.Tecnologia gemelli digitalis potest ostendere in loco trajectoriam robotis, voltam coniunctionis, amperagium, velocitatem et alias informationes de productione in tempore reali.
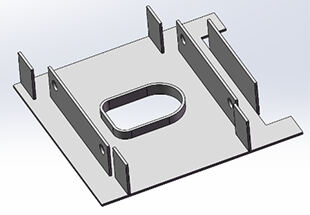
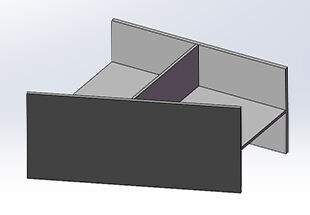
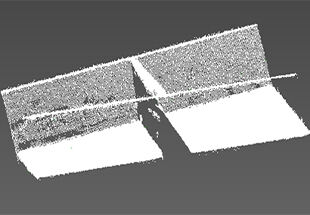
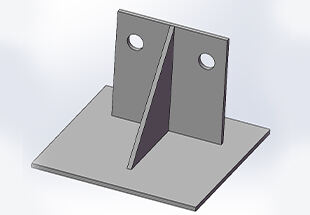
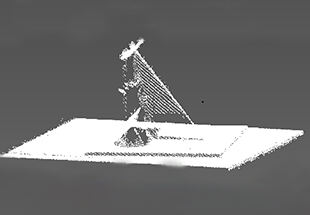
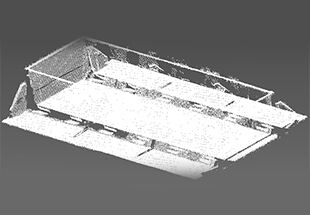
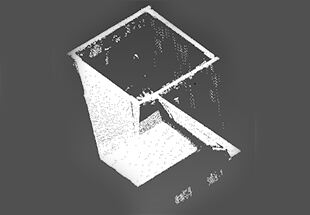
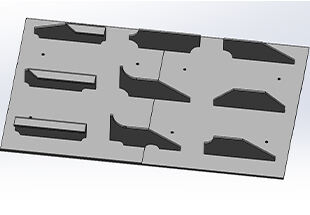
| NON | Genus operis | Imago formae operis | Imago nubis puncti operis |
| 1 | H Ligneae (Inclusas coniunctiones butta) | 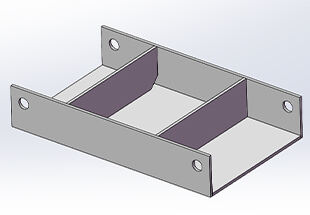 |
 |
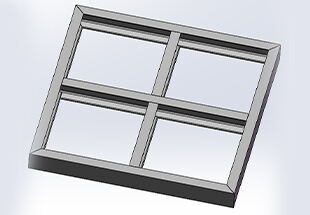
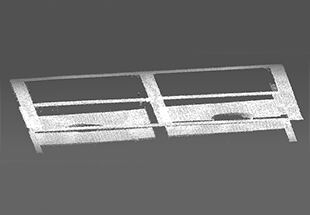
| 2 | Unitas tabularis |
 |
 |
| 3 | Ferrum Corbellum |
 |
 |
| 4 | Turritum |
 |
 |
| 5 | Placa sustentationis purlin |
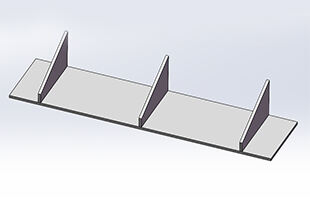 |
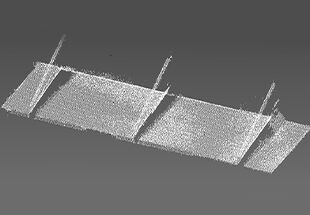 |
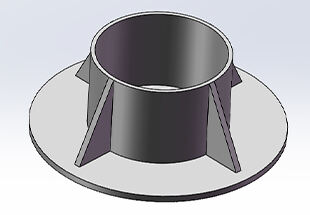
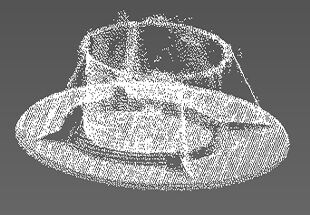
| 6 | Basis tubi rotundi |
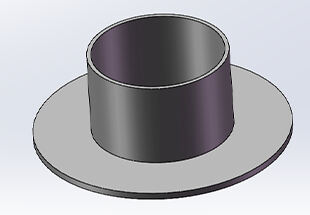 |
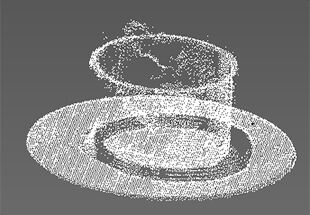 |
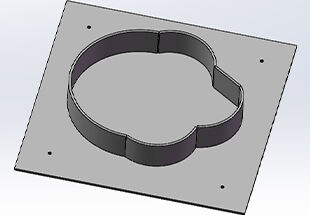
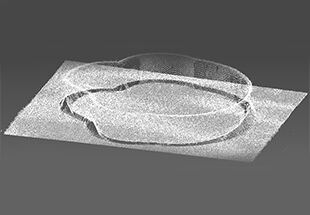
| 7 | Basis tubi circularis cruciformis |
 |
 |
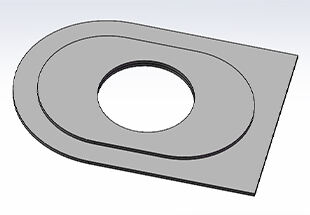
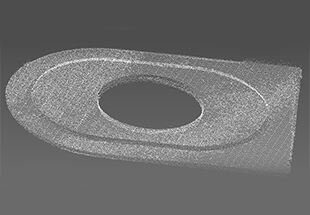
| 8 | Superficies aliena |
 |
 |
| 9 | Tabula duplex stratum |
 |
 |
| 10 | Constitutio fasciae canalis |
 |
 |
| 11 | Articulatio bivium conflatam | 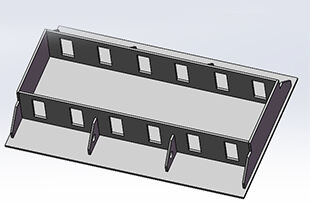 |
 |
| 12 | Girder cistae |
 |
 |
| 13 | Irregularis flectens soudatio |
 |
 |
| 14 | Funda Transformatorem |
 |
 |





