EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Visio 3D Plasmatis Obliquus Robot Excisura
Ambitus Operis:
Fossa recta: 100x100-7000x1200mm@20-45°
Fossa inversa: 100x100-6800x1000mm@40-60°
NON-DOCTRINALIS INTELLIGENS INCISIONES INCLINATAS
Oblicua sectio et coniunctio prioris processus, qualitas et efficientia problemata possunt directe producere bottlenecks in productione, hoc vero maxime in parvis partibus oblique incidunt. Nunc communiter traditio flammae sectio in parvis partium oblique adhibetur, processus qui praescriptus, positus, et oblique per currum flammarum fieri debet, et exiguum spatium operis requirit, et quotiescumque opus mutatur, iterum praeparatio individualis necessaria est. Propterea, traditio flammae sectio processus habet defectus tales ut: mala constantia in amplitudine oblique, mala qualitas, bassa efficientia, plures opera occupat, et angusta applicatio.
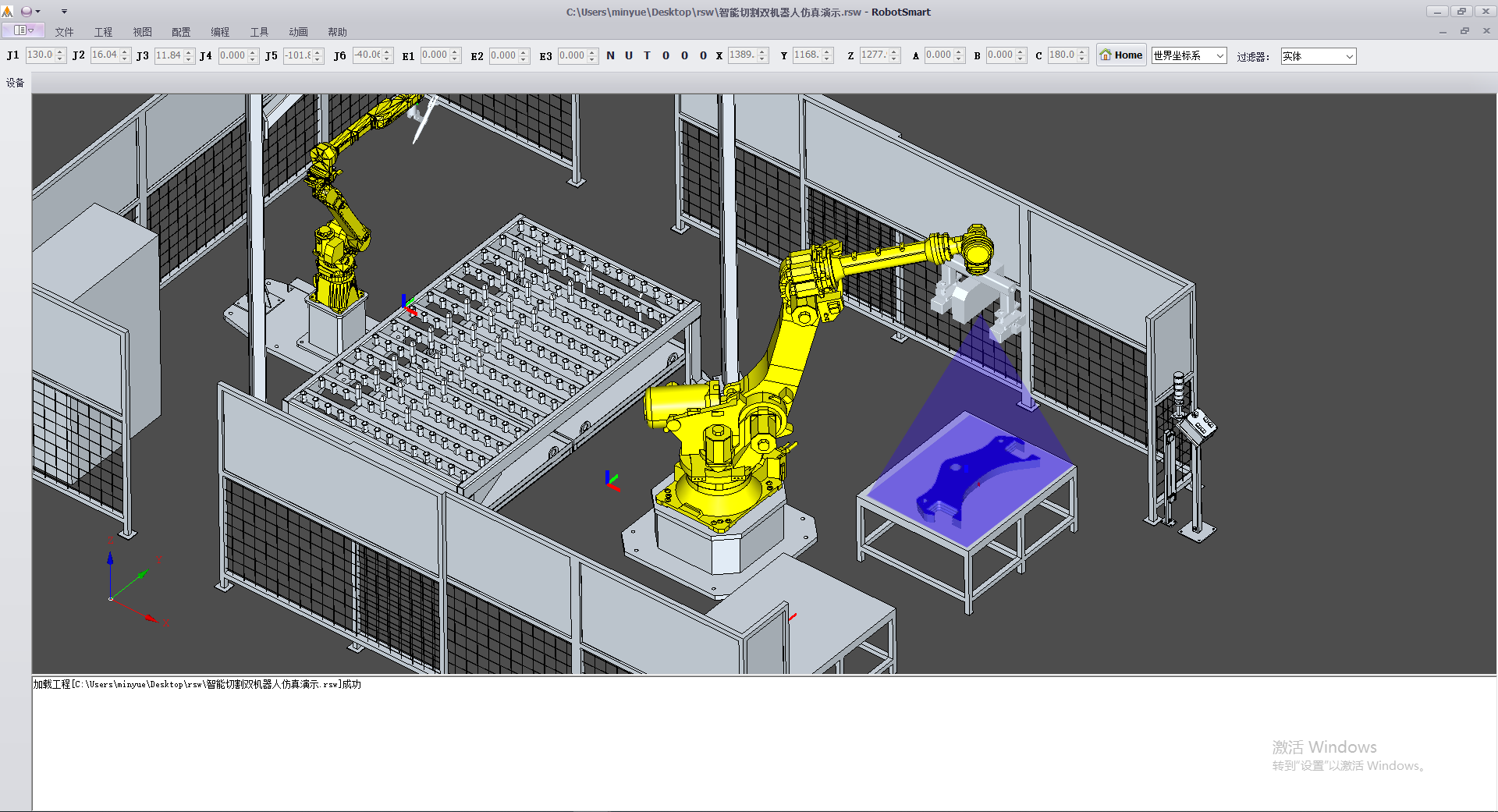
TECHNOLOGIA MINYUE non-docens intelligentis obliquo sectura RobotSmart systemate intelligenti decisionum cum SmartVisions systemate visionis 3D et SmartEye systemate laser trackings utitur, quod realizationem “non programma + visio” intelligentis obliquae sectionis praebet. Dolorificas productionis difficultates programmationis et intellectus parvi solvent, simul requisita sectionis parvorum batchium diversarum formarum operarum implent, efficientiam et redditum processus meliorem faciunt.

Ex adverso etiam complexiorum et varietatum maiorum taskorum, tres tantum passus sunt.
1. Importatio CAD DXF pignerum; 2. Celer tractus planning; 3. Automata generatio programmatum sectionis, tum cito sectio task perfici potest.
Optimizatio automata itineris sectionis, intelligentia planning viae obliquae, nulla retrorsum sectio superioris et inferioris obliquae.
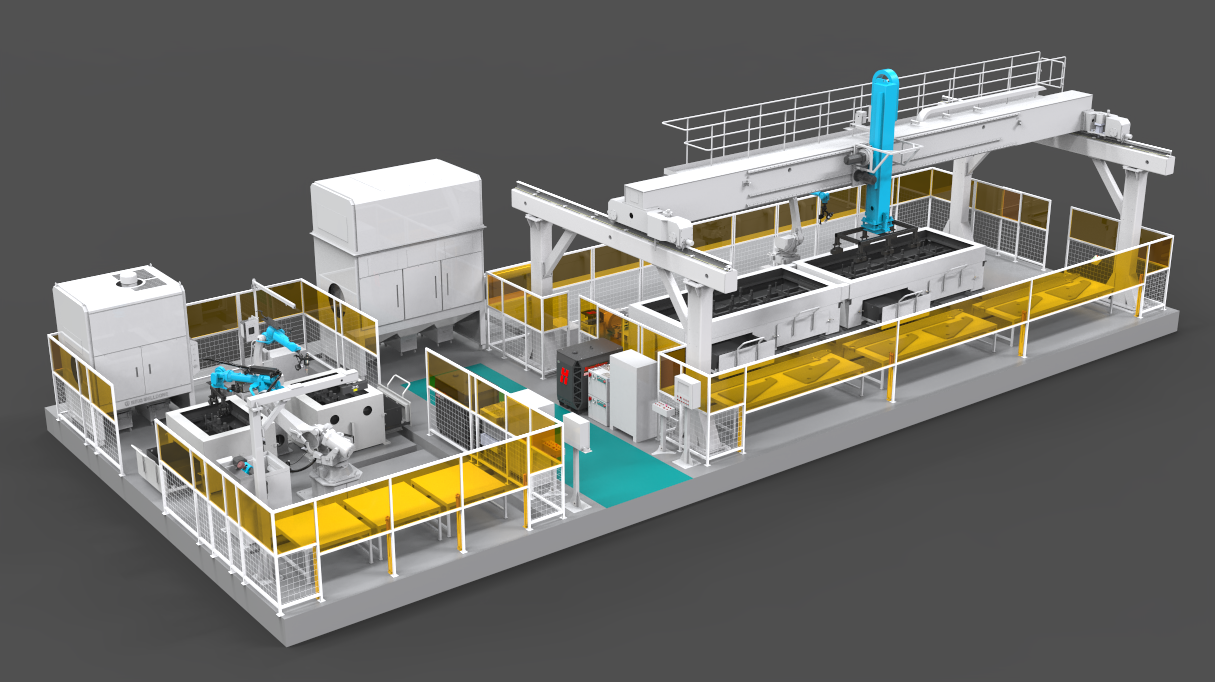
Camera binoculare capta imagines ad cognoscendum positionem operis et adprehendendum et ponendum mensam sectandi. Postquam sectio completa est, CNC procedit ad mensam sectionis adprehendendam. Plures opera simul adaptantur, et trajectum sectionis programmatur automate. Amplitudo sectionis ab 0.5 usque ad 4 metra. Magnopere meliorat efficaciam et securitatem laboris. Supportat processum sectionis flammae et processum sectionis plasmae.
Supportat varietates modos onerandi et deonerandi, manualem onerandum et deonerandum, gru cantilever onerandum et deonerandum, gru itinerantem onerandum et deonerandum, duas robot cooperantes onerandum et deonerandum, CNC onerandum et deonerandum.
Processus productio
● Positionem rudem operis in mensa sectionis per manus (Repetibilitas positionis operis intra ±5mm).
● Prima productio per software quod seligit positionem incisuram et generat iter incisurae ac parametos processus automatico; programma generatum potest conservari in systema controlis, subsequens productio potest directe evocari. (RobotSmart potest deployeri in 15-20 minutis per intelligentem platformam systematis decisionum.)
● Roboter incidens utitur sensore visu laser ad praecise positionare operandum. (Praeferentia Maior efficentia et accuratio quam contact edge finders.)
● Supportat Workstations Robot Cantilever Gantry Rails Terrae.
● Locomissit 12 solutiones pro segmentatis scenario applicationibus
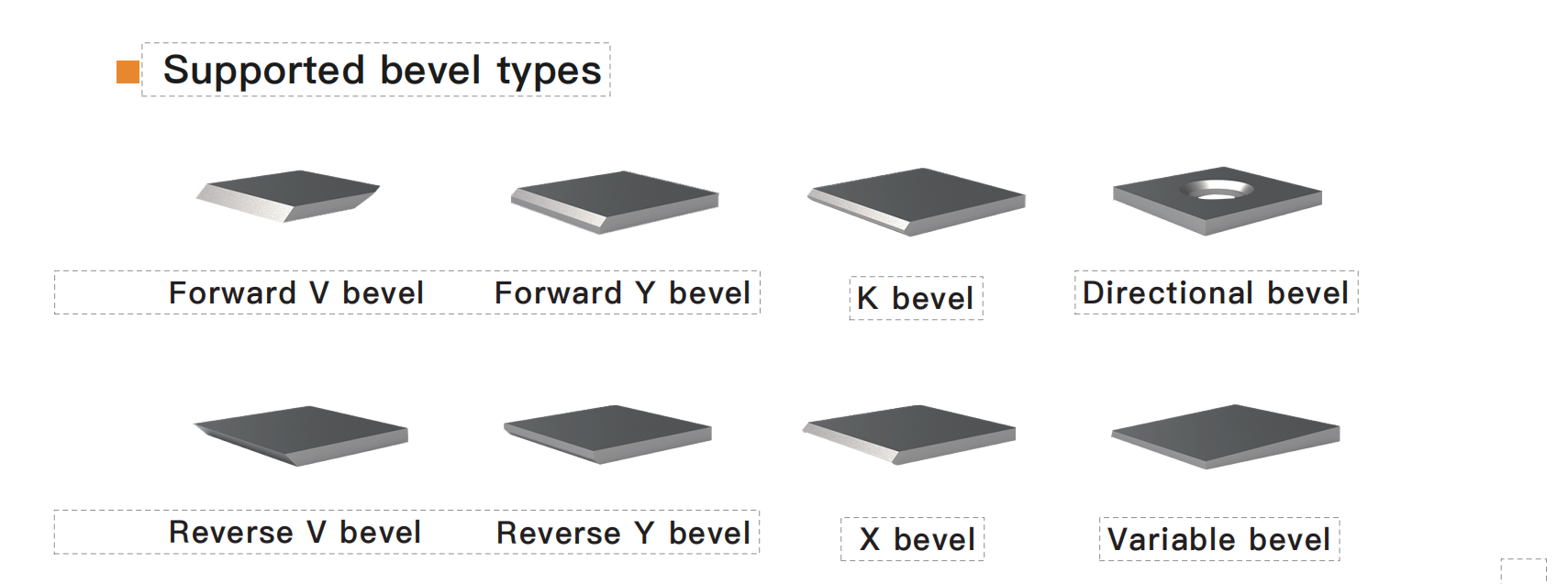
Supportatus types falcium