EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- Overview
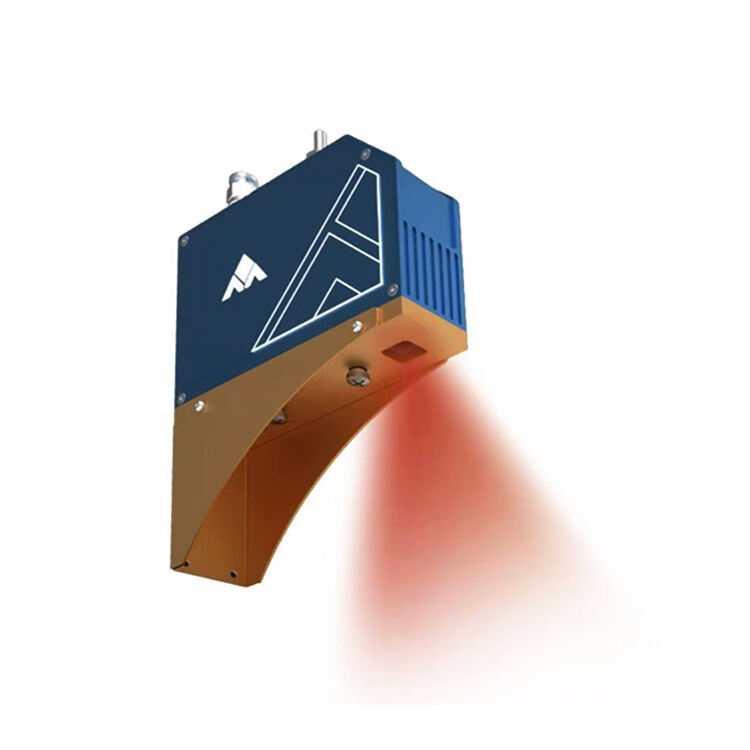
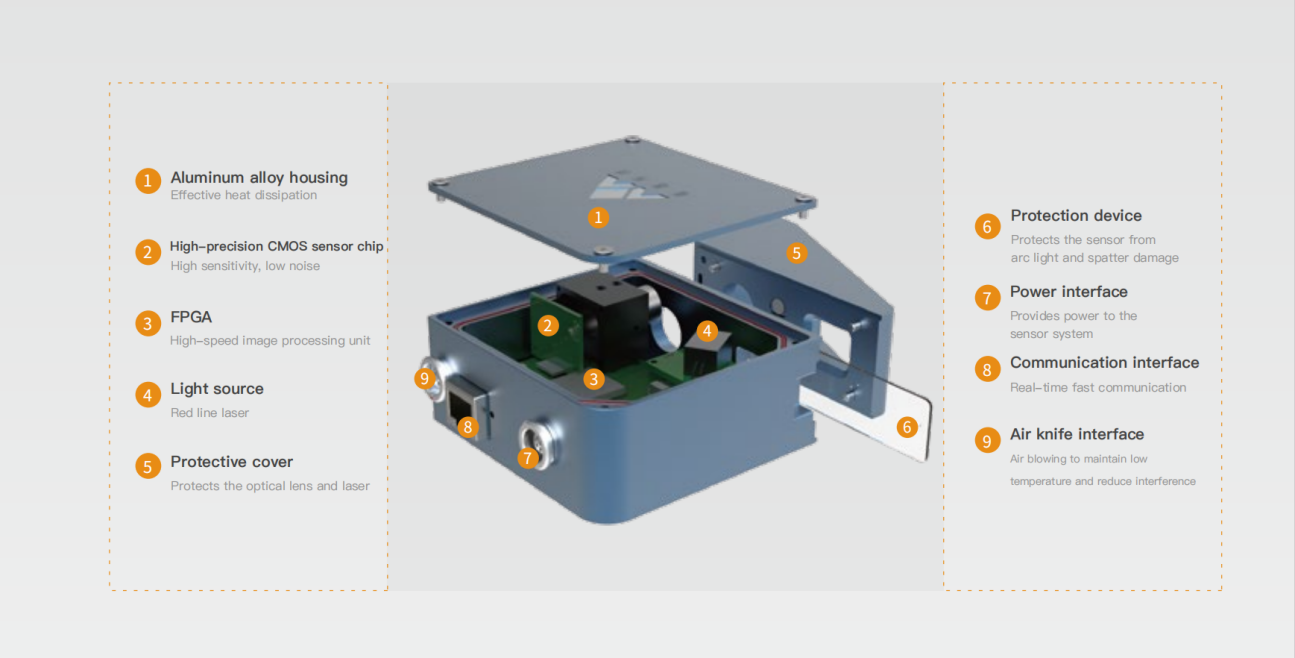
Laser summa sequi sensorem laser utitur laser ad irradiandam superficiem commissurae firmae ad formandum cohortis luminis laseris, quod recipitur et effingitur per cameram altam definitionis. Per processum algorithmicum, tres lineamenta firmamenti commissurae dimensionales transformantur in informationes structas, inter coordinatas coordinatas coordinatas, misalignment, hiatus, etc. Haec notitia ad robot moderatorem transmittitur, praebens roboti cum inquisita trajectoria et processu parametri ad weldingum, dirigens robot ad pactionem vel emendas operas deviationes in tempore reali perficiendo et perficiendo. Prae ceteris solutionibus, laser commissurae sequi utilitates habet non-contactus, summa accuratio, celeritas celeritas et aptabilitas bonae.

Sensorem accipit lineares mensuras lucis structuras, quae velocitatem imaginandi lineam, nullum contactum, nullumque mechanicum motum habet; Aptabilitas fortis, apta ad parametris commissurae glutino aptando; Plene infixa, cum computers industriae potestate et multis aliis commodis externis, late in diversis generibus automated glutinis adhibetur. Cuiuscumque processus glutino, certa subsidia et stabilia praebere possumus ut optimos eventus in diversis missionibus glutino curent.
Interface graphical programmatis plena, processus parametri occasus, singula menu iuvare, non-professionales etiam cito incipias fieri.
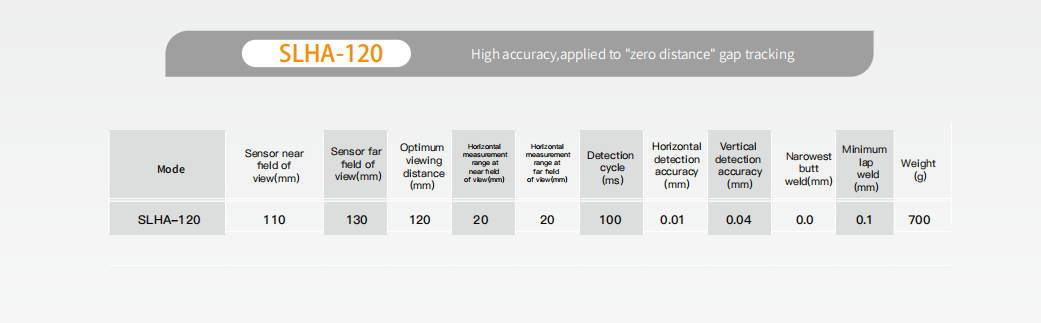
*Nulla hiatus deprehensio sensoriis instructus hoc munere refert, qui ad hiatus infra 0.1mm cognoscendos adhiberi potest.
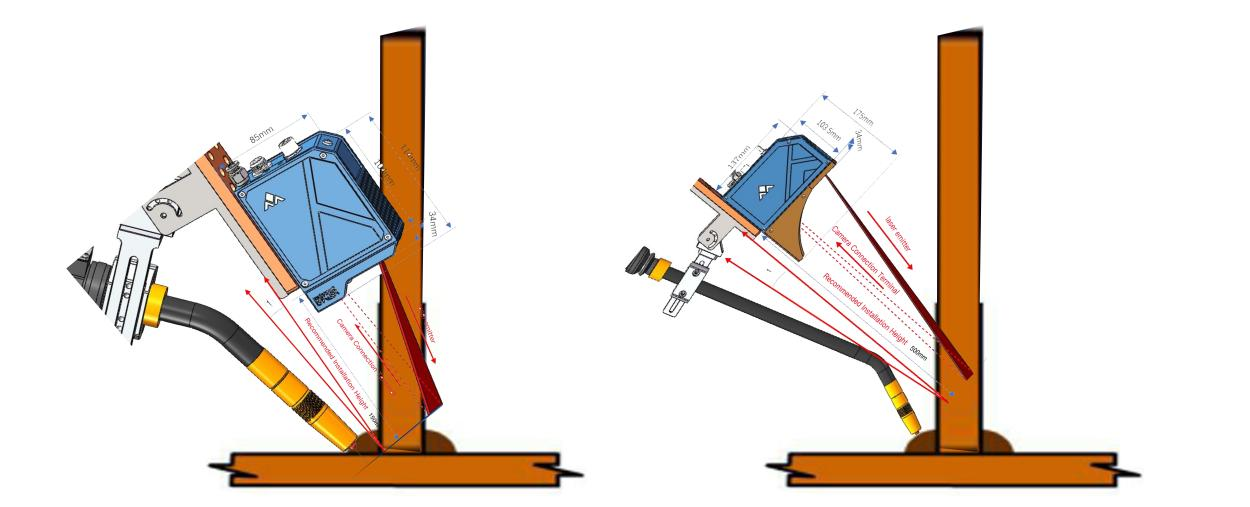
* Visus distantiae est pro reference tantum et possunt accommodari secundum specifica user necessitates
Sensor aptus est applicationibus postulandis, quod sentit lucem, aquam et pulverem vagari (IP67) et immunis radiorum electromagneticorum (EMC).
Cum potente munere.
01. loco et deviatione correctionis
Munus correctio positionis et deviationis adhibetur pro conglutinatione flexibili missionum diversorum officinarum cum eodem exemplari, sed repugnantibus toleranciis. Hoc munus efficit ut nulla interventus manualis requiratur cum commutatione operum et robot positionis et deviationis systematis disciplinae ducitur ad certae glutino assequendas;
Duo-Point positio apta ad lineam rectam 2D cinguli welds.
Multi-Point Positioning Apta pro multi-segmento 2d offset welds
Segmentum Positio Apta pro multi-segmento 3d offset welds.
02 Verus-vicis mauris
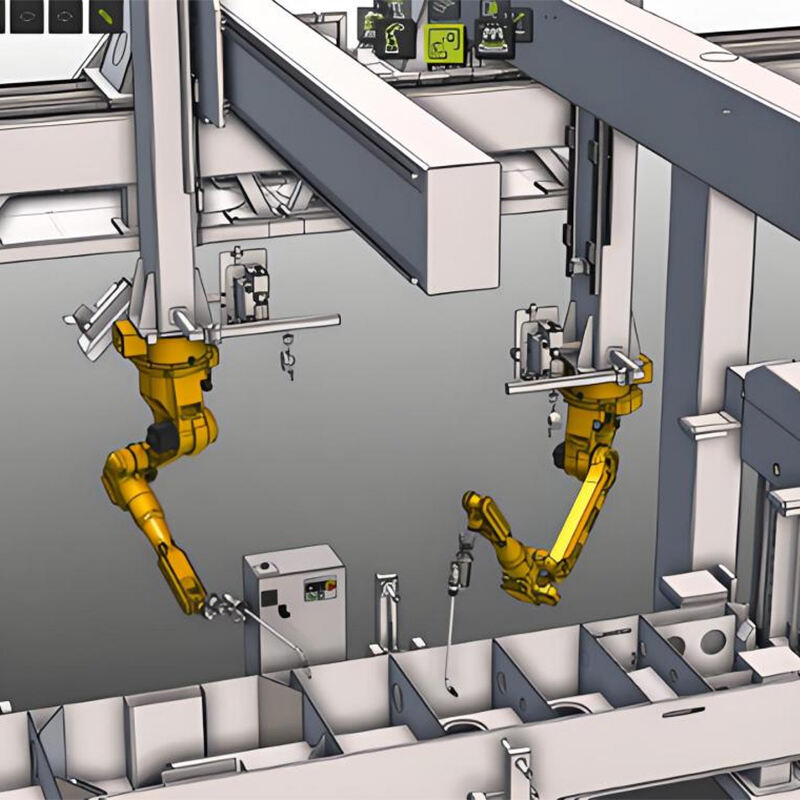
Munus tracking reale tempus adhibetur in missionibus glutino adhibitis, quae altam efficientiam requirunt nec spatialis impedimentum. Sensorem relativum ad taedam glutino figitur, et taeda glutinosa automatice iter glutino secundum datas 3D coordinatas aptat.
03.Scanning et Lorem glutino
Munus perscrutans et conglutinatio latae permittit sensorem ad primam informationem geometricam de weldis colligere. Hoc munus aptum est summus reflexivum, angustis spatiis glutino et missionibus implicatis.
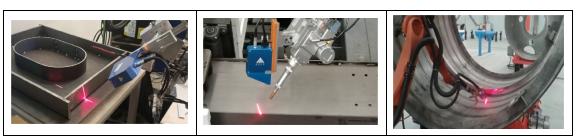
Laser Soam mauris
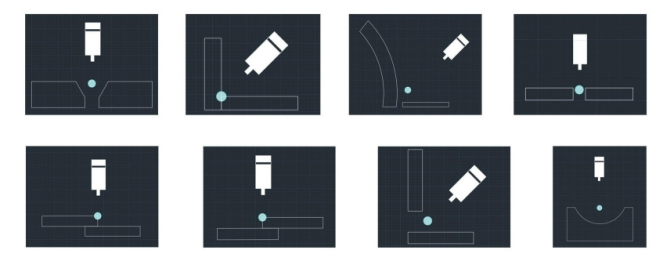
Laser Seam Semita potest deprehendere alta, humilis et sinistra et dextra pugillo deviationes.
Potest deprehendere splicing lacunas per parvas hiatus.
Solvere problema de summae investigationi glutino ad laminam tenuem evolutam.
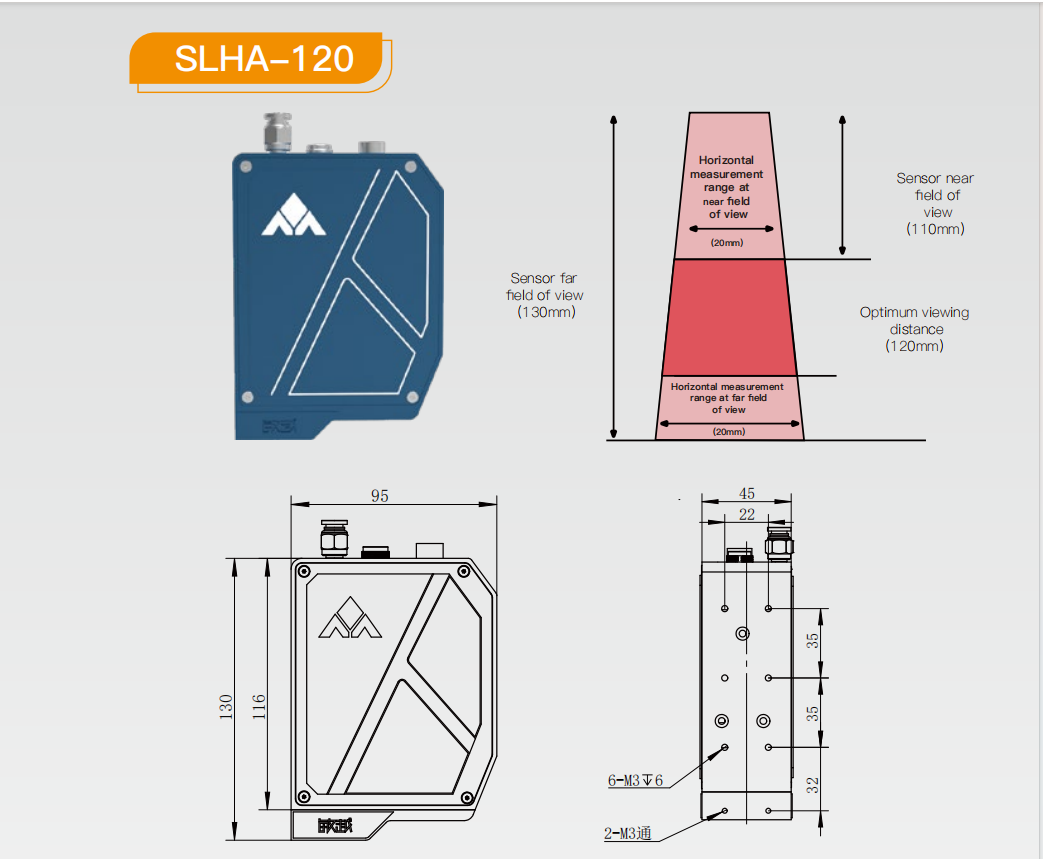
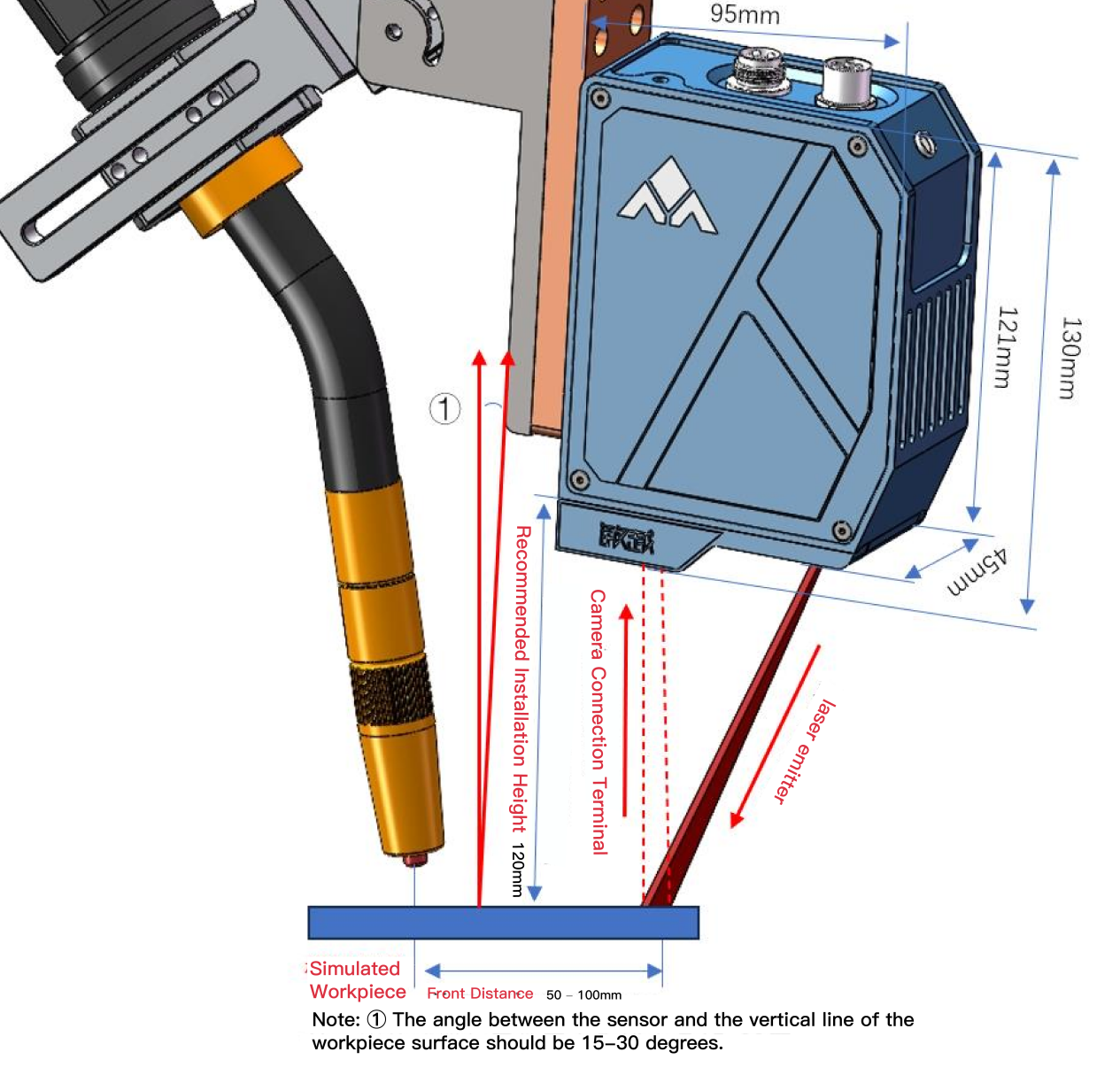
Distantia optimalis observationis 120 mm est.
Support pugillo type
V sulcus weld
Infula weld
Hemming weld
Splicing weld
Welsum gremium, etc.
Magna cura, nulla pice welds. idoneus pro immaculato ferro iuncta Industry.
Placere eligere genus rationabiliter secundum actualem applicationis ambitum, ad vitandum soni collisionem collisionem, robot onus plerumque plerumque 20KG egent.