 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


비교육형 강구조 게이트식 스마트 용접 로봇

강구조물 가이드형 용접 로봇
이 장비는 강구조물 공장의 자동화 생산을 위해 특별히 맞춤 제작된 특수 용접 로봇입니다.
이 장비는 강구조물 공장의 자동화 생산을 위해 특별히 맞춤 제작된 특수 용접 로봇입니다.
1. 장비는 주로 다음과 같은 구성 요소로 이루어져 있습니다: 레일 부품, 가이드 부품, 로봇 조정 부품, 전기 제어 박스 부품, 용접 파워 서플라이 부품 등.
2. 가antry 구성 요소는 주로 드라이브 엔드 프레임, 크로스 비ーム, 조정 프레임 등으로 구성됩니다. 드라이브 엔드 비ーム, 크로스 비ーム 및 조정 프레임은 모두 박스형 용접 구조를 채택하며, 용접 후 응력 해소 처리를 거칩니다. 구조는 콤팩트하고 외관이 아름답습니다.
3. 전체 기계의 활성 드라이브 엔드 비ーム은 일본 파나소닉 AC 서보 드라이버 및 모터를 사용하여 일본 SHIMPO 리듀서를 구동하고, 이후 톱니바퀴 전달을 통해 작동합니다. 드라이브 엔드 비ーム 측면에 수평 가이드 휠이 설치되어 있으며, 가이드 휠은 그의 이심축을 조정하여 가이드 레일에 맞닿게 할 수 있어 기계의 안정성과 정확성을 보장합니다.
4. 카트의 이동 가이드 레일은 모두 38KG/M로 제작되었습니다. 가이드 레일의 외측에는 정밀 가공된 랙이 장착되어 있습니다. 랙은 모듈 2.0의 45강으로 만들어졌으며, 양방향 드라이브 방식을 채택합니다. 가이드 레일은 압력판 백업 플레이트를 통해 고정됩니다. 이 설치 방법은 두 개의 가이드 레일의 종방향 직선도와 평행도와 같은 중요한 기술적 매개변수를 보장할 수 있습니다.
비교육용 지능형 용접 지원은 구체적으로 Drawing 유형 3D 도면 가져오기, 용접 선 자동 추출, 로봇 용접 궤적 자동 생성, 자세 시각화, 용접 토치 충돌 자동 검출로 나뉩니다.
로봇 용접 궤적의 자동 생성, 자세 시각화, 용접 궤적 최적화, 토치 충돌 자동 감지.
도면 유형 없이 3D 스캐닝 역모델링, 3D 도면의 빠른 생성, 로봇 용접 경로의 자동 생성, 용접 경로 최적화, 자세 시각화, 용접 토치 충돌의 자동 감지가 가능합니다.
매개변수
| 작업물의 최대 길이 | 11m |
| 플랜지 너비 | 2.5m |
| 간트 이동 레일 게이지 | 2800 mm |
| 간트 이동 모터 출력 | 2x0.75 kW |
| 간트 이동 용접 속도 | 100-1000 mm/min |
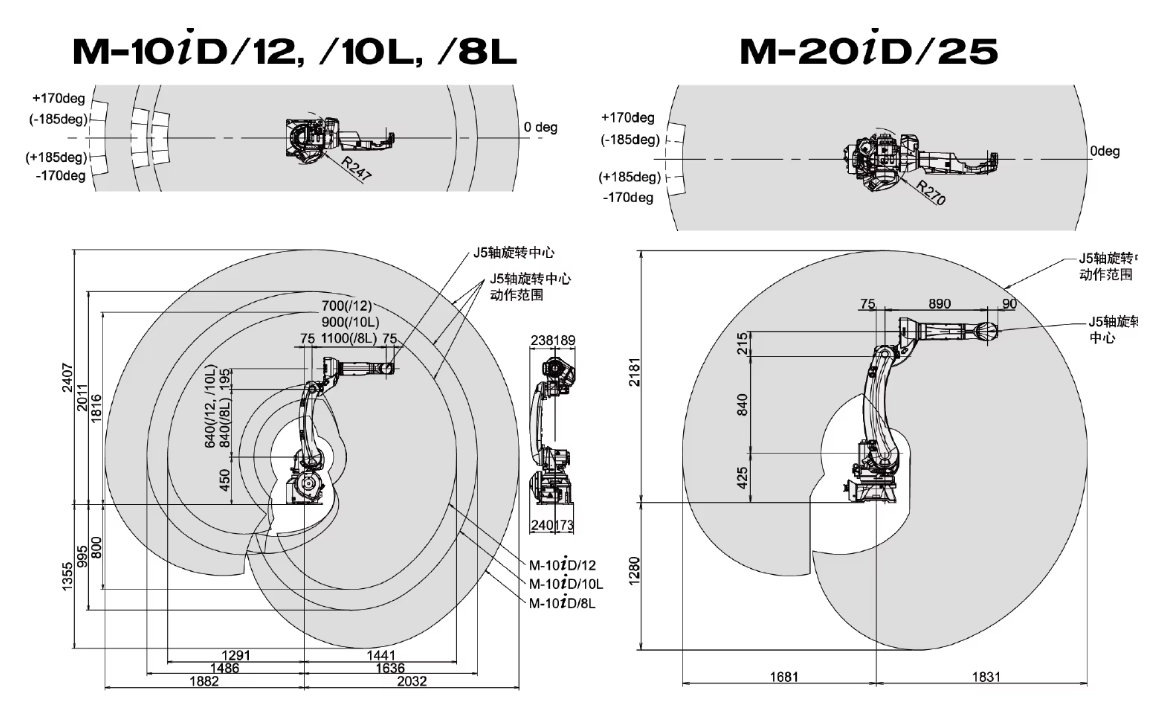
용접 로봇
일본에서 제작된 FANUC 용접 로봇을 사용합니다. 구체적인 로봇 파라미터는 다음과 같습니다.
LDWEP-500 레이저 트래커
LDWEP-500은 지능형 라인 스캐닝 용접 피복 센서입니다. 라인 레이저 스캐닝을 통해 용접 피복 단면의 윤곽 정보를 얻고, 로봇 또는 용접기를 안내하여 자동으로 용접을 완료합니다. 이미지 획득, 처리 및 용접 선 식별 기능은 외부 컴퓨터가 필요 없이 센서 내부에서 완료됩니다. 이는 높은 통합도를 가지고 있으며 시스템의 전체 하드웨어 비용을 줄입니다. 전극 빛과 튀기기에도 강하며, 용접 선을 지능적으로 식별하고, 사용이 간편합니다. 구조가 정교하고 크기가 작아 접근성이 뛰어나며 다양한 종류가 있습니다. 응용 상황에 따라 선택하여 사용할 수 있고 가장 적합한 매개변수를 맞춤 설정할 수 있습니다.

용접 파워 서플라이 스틸 구조물 산업용 H빔 6-9축 용접 로봇 스테이션 중국
Megmeet CM500 용접 전원 장치 사용: 완전 디지털 산업용 중장비 CO2/MAG/MMA 지능형 용접기입니다. 이는 레일 교통, 자동차, 조선, 철골 구조물, 컨테이너, 기계, 금속 등 다양한 탄소강 용접 가공 분야에서 널리 사용되며, 산업용 중하중 및 혹독한 환경에서도 작동합니다.







