EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


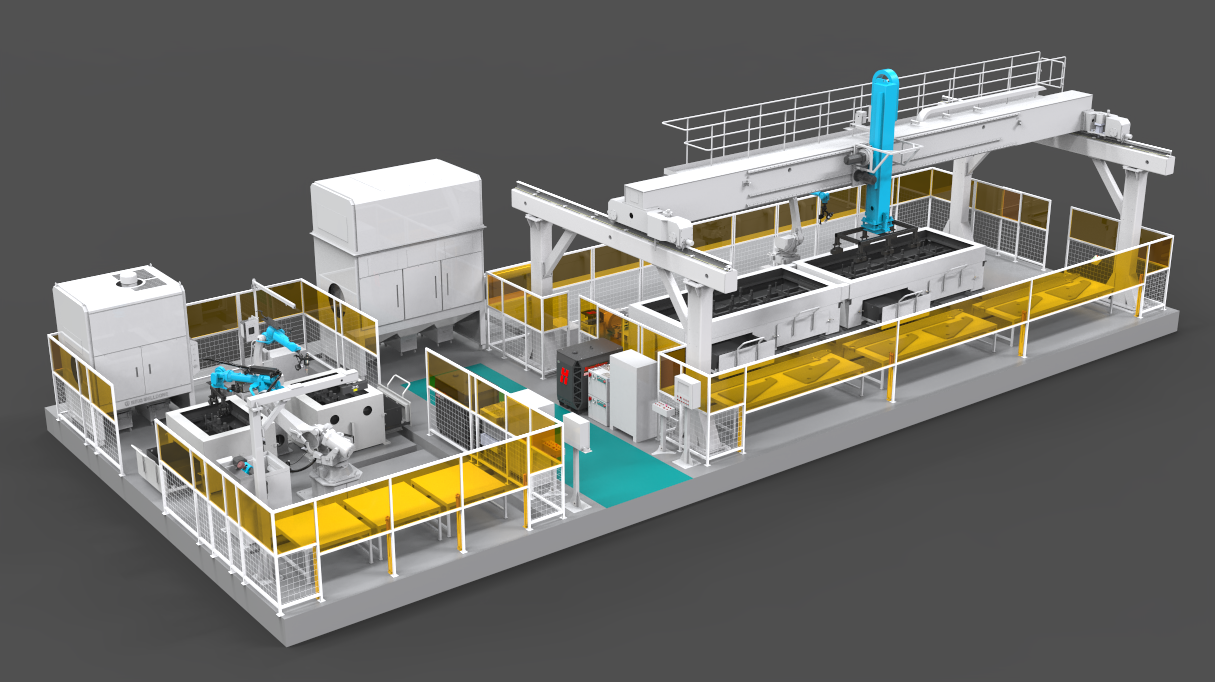
3D 비전 베벨 플라즈마 로봇 절단
작업 범위:
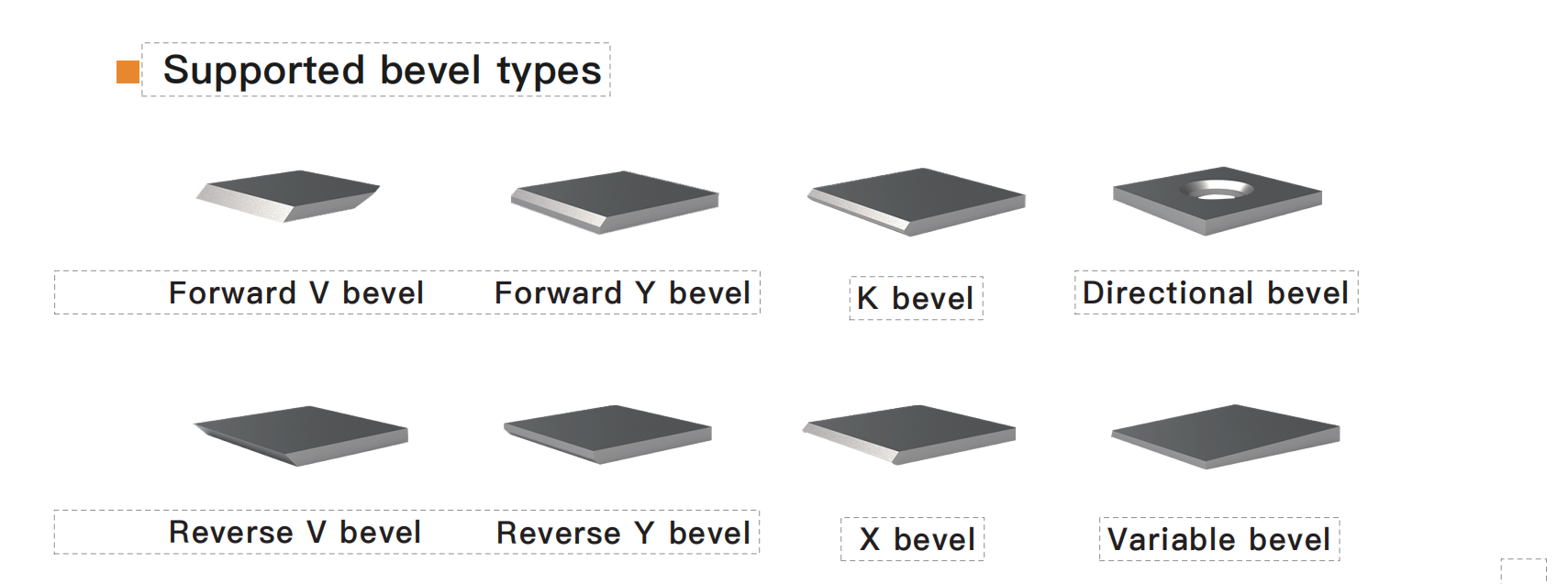
양면 홈:100x100-7000x1200mm@20-45°
역 비스듬한 각도:100x100-6800x1000mm@40-60°
비지도형 인텔리전트 비스듬한 절단
프로세스의 앞부분에서 비스듬한 절단과 용접은 품질과 효율성 문제를 직접적으로 발생시켜 생산 병목 현상을 초래할 수 있습니다. 특히 작은 부품의 비스듬한 절단에서는 더욱 그렇습니다. 현재 작은 부품의 비스듬한 절단에는 전통적인 플레임 절단이 일반적으로 사용되며, 이 과정에서는 사전 선그리기, 배치 및 플레임 카트를 이용한 비스듬한 절단이 필요하며, 작게 제한된 작업 공간을 요구하고, 매번 작업물을 교체할 때마다 재가열이 필요합니다. 따라서 전통적인 플레임 절단 공정은 비스듬한 절단 범위의 일관성이 떨어지고, 품질이 낮으며, 효율성이 떨어지고, 많은 노동력을 차지하며, 응용 범위가 좁다는 등의 단점이 있습니다.
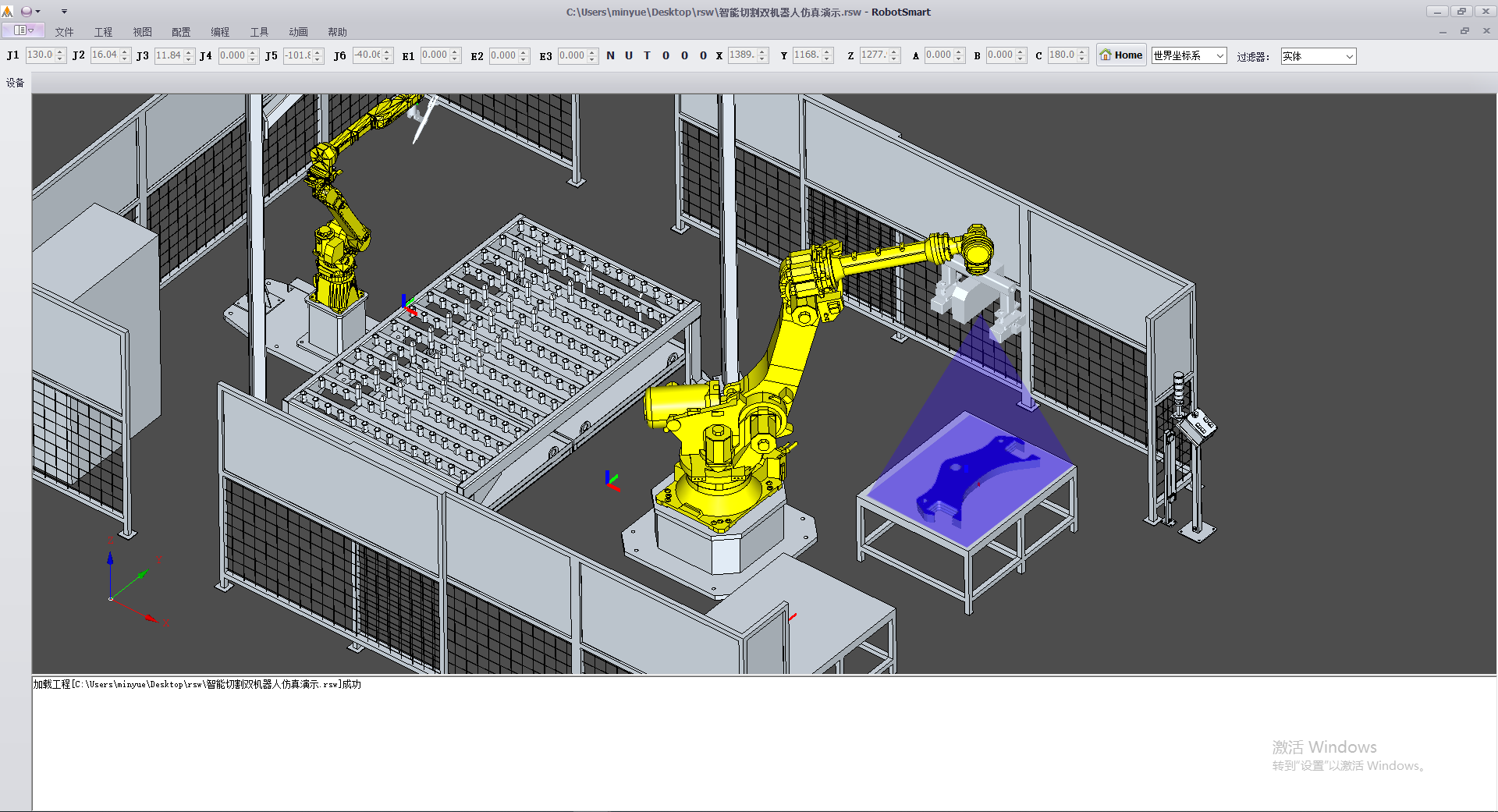
MINYUE TECHNOLOGY의 비가르기 지능형 베벨 절단은 RobotSmart 지능형 의사 결정 시스템, SmartVisions 3D 비전 시스템 및 SmartEye 레이저 추적 시스템을 사용하여 '비 프로그래밍 + 비전' 지능형 베벨 절단을 실현합니다. 프로그래밍이 어려운 문제와 지능화 수준이 낮은 생산 문제를 해결하고, 동시에 다양한 소량 작업물의 절단 요구를 충족하며, 가공 효율과 합격률을 향상시킵니다.

더욱 복잡하고 다양한 작업에 직면했을 때도 단지 세 가지 단계만 거칩니다.
1. CAD DXF 파일 가져오기; 2. 신속한 궤적 계획; 3. 자동 절단 프로그램 생성 후 절단 작업을 신속히 완료할 수 있습니다.
자동 절단 경로 최적화, 지능형 베벨 경로 계획, 상하 베벨의 역방향 절단 없음.
이중 렌즈 카메라가 작업물을 인식하고 자동으로 위치를 파악하여 절단 테이블에서 작업물을 집어서 옮깁니다. 절단이 완료되면 CNC가 절단 테이블로 이동하여 작업을 수행합니다. 여러 개의 작업물을 동시에 처리할 수 있으며, 절단 경로는 자동으로 계획됩니다. 절단 범위는 0.5m에서 4m까지입니다. 이는 작업 효율성과 안전성을 크게 향상시킵니다. 플레임 절단 공정과 플라즈마 절단 공정을 지원합니다.
다양한 로딩 및 언로딩 모드를 지원합니다: 수작업 로딩 및 언로딩, 현수 크레인 로딩 및 언로딩, 트래블링 크레인 로딩 및 언로딩, 듀얼 로봇 협력 로딩 및 언로딩, CNC 로딩 및 언로딩 등이 있습니다.
생산 과정
● 작업물의 대략적인 위치를 손으로 조정 (작업물 위치 반복 정확도 ±5mm 이내).
● 소프트웨어를 통해 절단 위치를 자동으로 선택하여 절단 가이드 궤적과 공정 매개변수를 생성하고, 생성된 프로그램은 제어 시스템에 저장될 수 있으며, 이후 생산에서는 직접 호출할 수 있습니다. (RobotSmart은 지능형 의사 결정 플랫폼 시스템을 통해 15-20분 안에 배포할 수 있습니다.)
● 절단 로봇은 레이저 비전 센서를 사용하여 작업물을 정확히 위치시킵니다. (장점: 접촉식 엣지 파인더보다 효율性和 정확도가 더 높습니다.)
● Ground Rail, Gantry, Cantilever 로봇 워크스테이션을 지원합니다.
● 세그먼트별 응용 시나리오에 대한 12종의 솔루션을 출시했습니다
지원하는 벨브 유형