 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- 概要
- ロボットブランド対応
レーザー溶接トラッキングセンサーは、レーザーを使用して溶接継ぎ目表面を照射し、レーザーライトバンドを形成します。これは高解像度カメラによって受信され、イメージ化されます。アルゴリズム処理により、溶接継ぎ目の三次元特性が構造化された情報に変換されます。この情報には、溶接ジョイント座標、ずれ、ギャップなどが含まれます。この情報はロボットコントローラーに送信され、ロボットに溶接に必要な軌道とプロセスパラメーターを提供し、ロボットがリアルタイムで溶接を行うか、作業部品のずれを補正し、完璧な溶接作業を実現します。他のソリューションと比較すると、レーザートラッキングは非接触、高精度、高速、そして優れた適応性という利点があります。
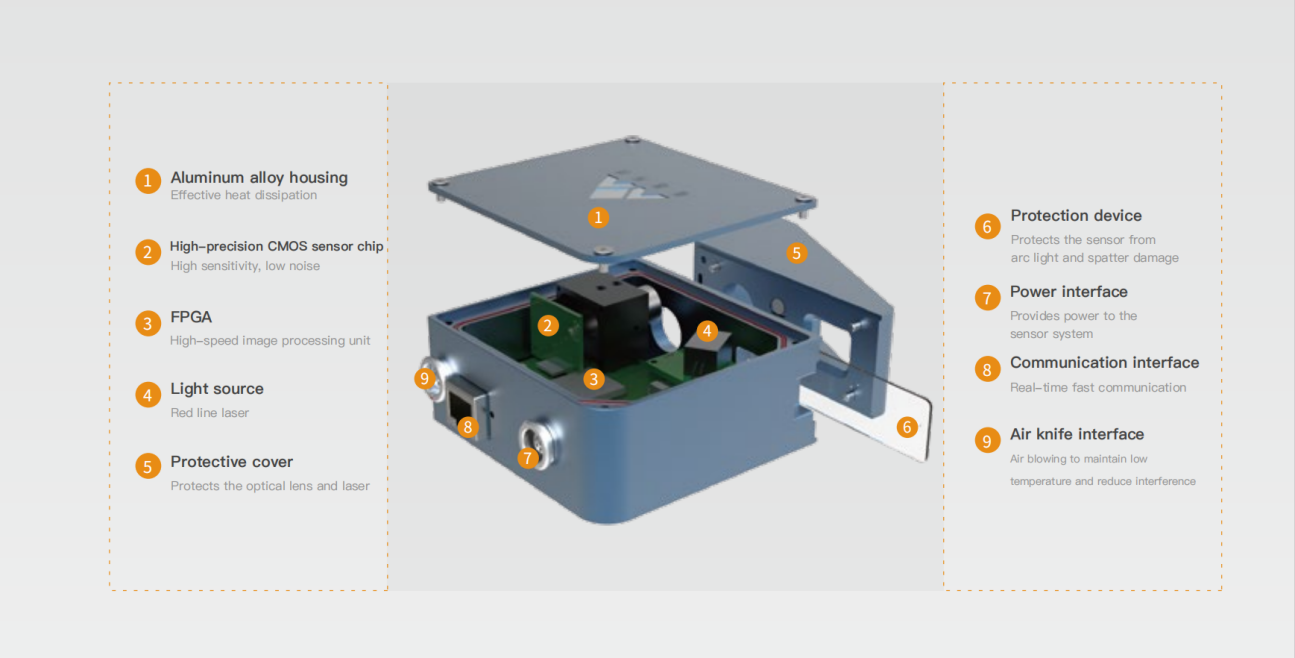
このセンサーは線形構造光測定を採用しており、高速なラインイメージング、非接触、機械的な動きがないという特長があります。強力な適応能力を持ち、溶接継手のパラメータを出力可能で、完全に組み込まれた設計であり、外部の産業用制御コンピュータと連携するなど多くの利点があります。さまざまな種類の自動溶接に広く使用されています。溶接工程に関係なく、異なる溶接状況で優れた結果を得られるよう、信頼性の高いサポートと安定した性能を提供します。
このセンサーは、散乱光、水、埃(IP67)に影響を受けにくく、電磁放射(EMC)にも免疫があるため、最も要求の厳しいアプリケーションに適しています。
強力な機能を持つ。
01. 位置補正と偏差修正
位置補正と偏差修正機能は、同じモデルながら公差が一致しない異なるワークピースの柔軟な溶接シナリオに使用されます。この機能により、ワークピースを切り替える際に手動での介入が不要となり、ロボットは位置補正と偏差修正システムによって正確な溶接を実現します。
直線2Dオフセット溶接に適した2点定位。
マルチポイント位置決め 多セグメントの2Dオフセット溶接に適しています
セグメント位置決め 多セグメントの3Dオフセット溶接に適しています。
02 実時追跡
リアルタイム追跡機能は、高効率かつ空間干渉のない溶接シーンで使用されます。センサーは溶接トーチに対して固定され、溶接トーチは3D座標データに基づいて自動的に溶接パスを調整します。
03. スキャンと自動溶接
スキャンと自動溶接機能により、センサーがまず溶接部の幾何学的情報を収集します。この機能は、高反射、狭い溶接空間、複雑な溶接シーンに適しています。
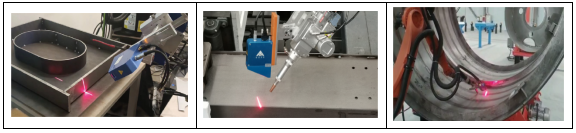
レーザー継ぎ目追跡
レーザー継ぎ目追跡は、上下左右の溶接ずれを検出できます。
小さなギャップを持つ継ぎ目溶接を検出できます。
薄板継ぎ目の溶接追跡の問題を解決します。
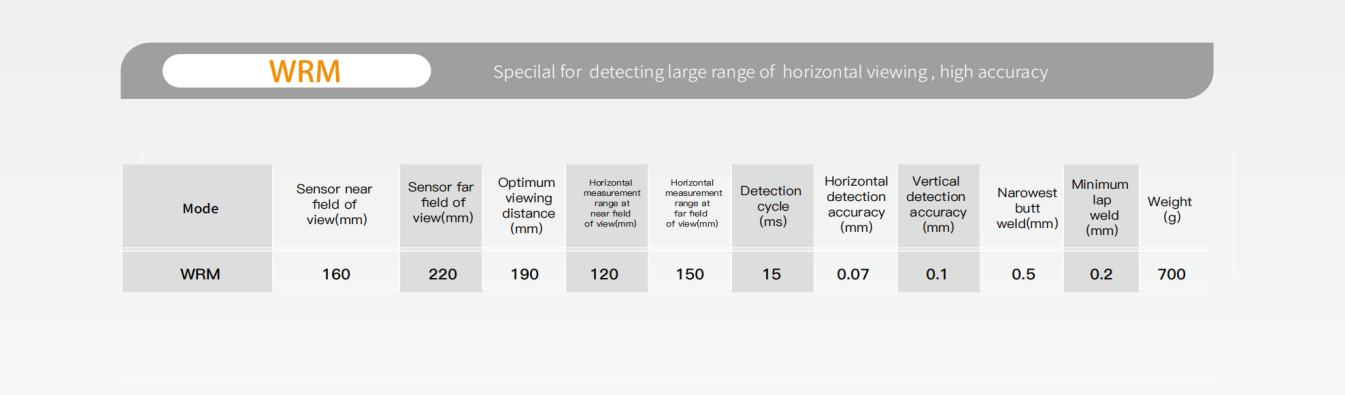
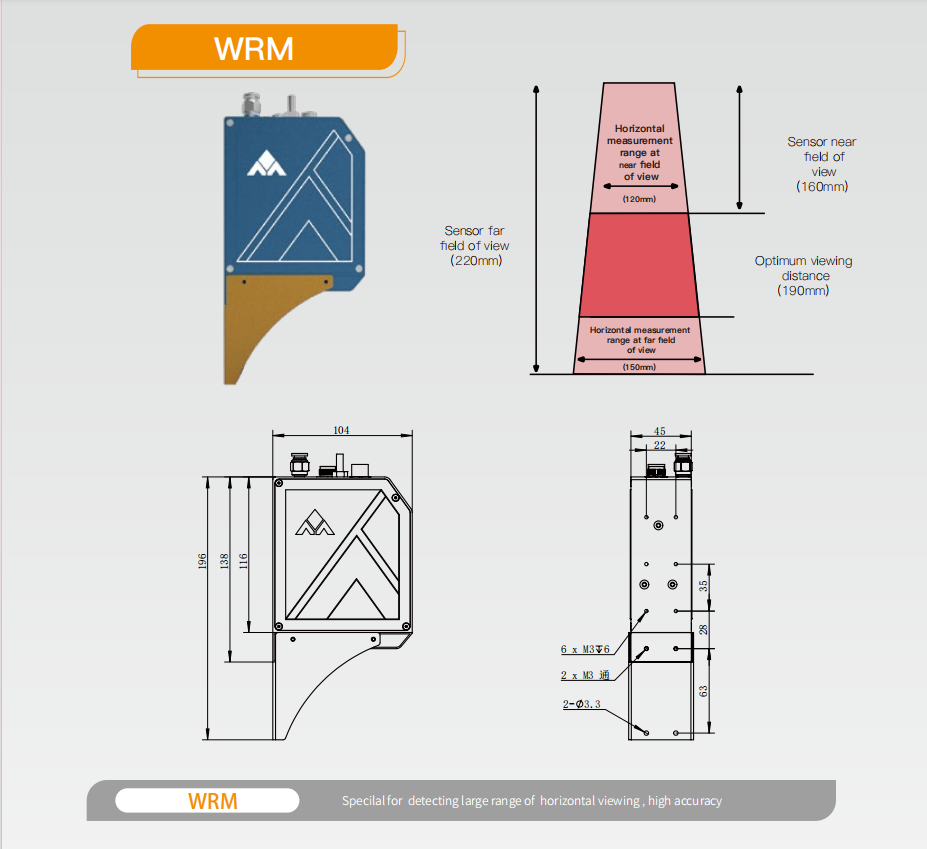
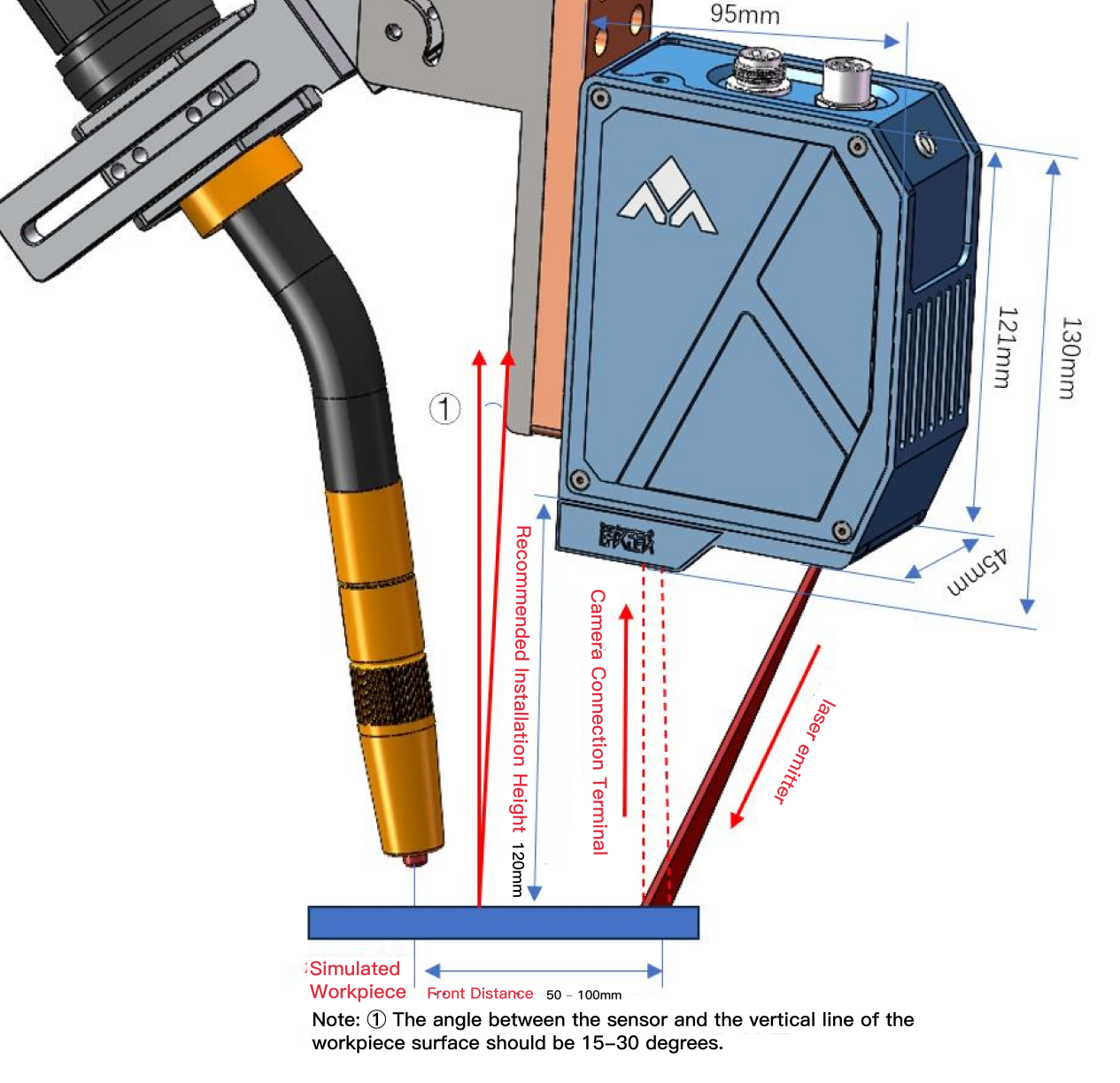
最適な観測距離は約190mmです。
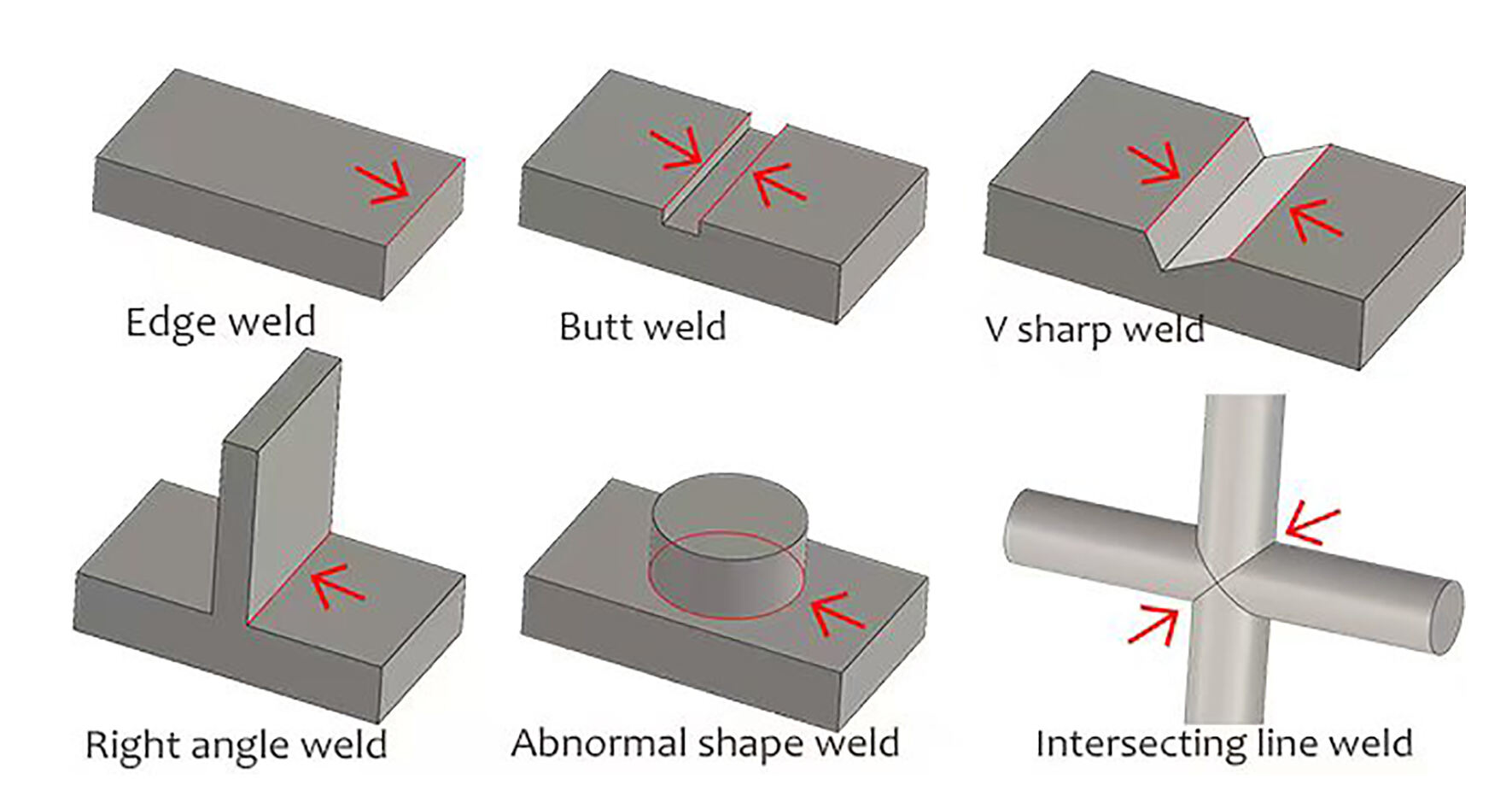
溶接タイプ対応
Vグローブ溶接
フィレット溶接
へミング溶接
スパlicing溶接
ラップジョイントなど
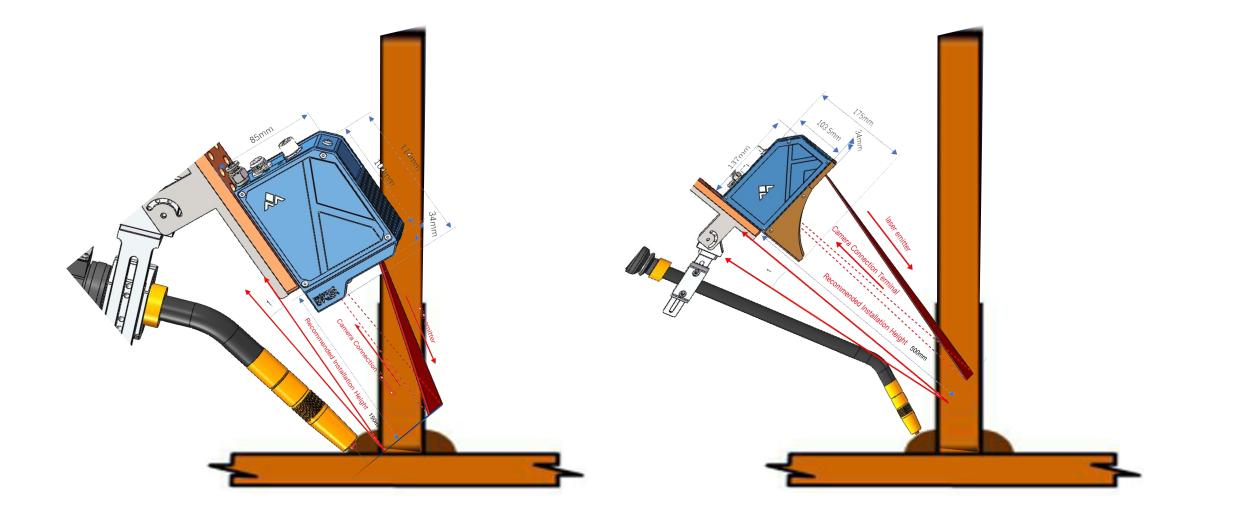
長い垂直視距離、高精度で、鋼構造物および建設機械産業に適しています。
• 実際の使用範囲に応じてタイプを選択し、ワークピースとセンサの衝突を回避するために、ロボットの負荷は通常20KG必要です。
協力パートナー 
ロボットブランド対応







