EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- 概要
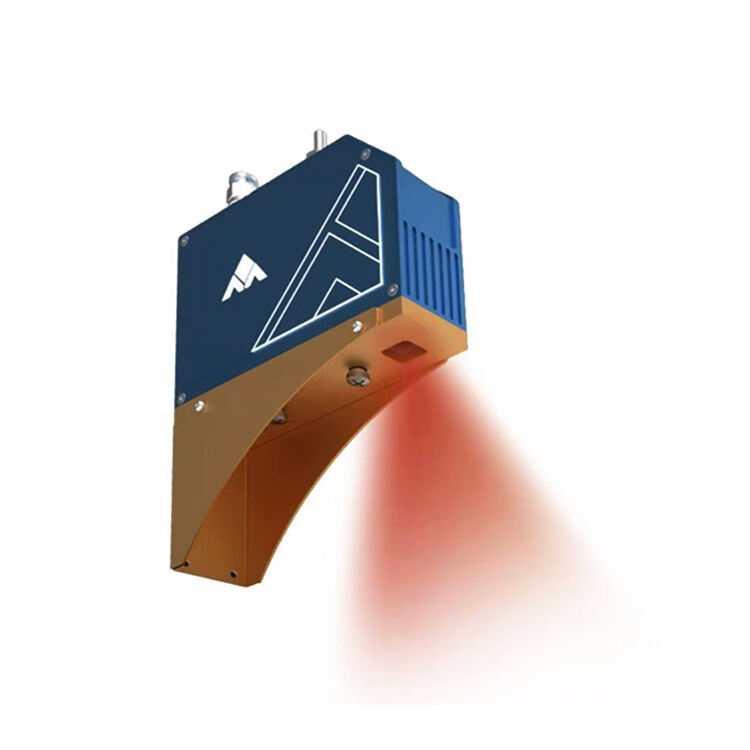
レーザーシームトラッキングセンサーは、レーザーを使用して溶接シームの表面に照射してレーザー光帯を形成し、高解像度カメラで受信して画像化します。アルゴリズム処理により、溶接シームの3次元特徴が、溶接ジョイントの座標、ずれ、ギャップなどの構造化情報に変換されます。この情報はロボットコントローラーに送信され、ロボットに溶接に必要な軌道とプロセスパラメーターを提供し、ロボットを溶接に誘導したり、ワークピースの偏差をリアルタイムで修正したりして、完璧な溶接作業を実現します。他のソリューションと比較して、レーザーシームトラッキングは、非接触、高精度、高速、優れた適応性などの利点があります。

このセンサーは、線状構造化光測定を採用しており、線状画像化速度が速く、非接触で、機械的な動きがありません。適応性が強く、溶接シームパラメータを出力できます。完全に組み込まれており、外部の産業用制御コンピュータなど多くの利点があり、さまざまな種類の自動溶接で広く使用されています。溶接プロセスに関係なく、信頼性の高いサポートと安定したパフォーマンスを提供し、さまざまな溶接シナリオで優れた結果を保証します。
完全なグラフィカルソフトウェアインターフェース、パラメータ設定プロセス、ヘルプメニューの詳細、専門家以外の人でもすぐに始めることができます
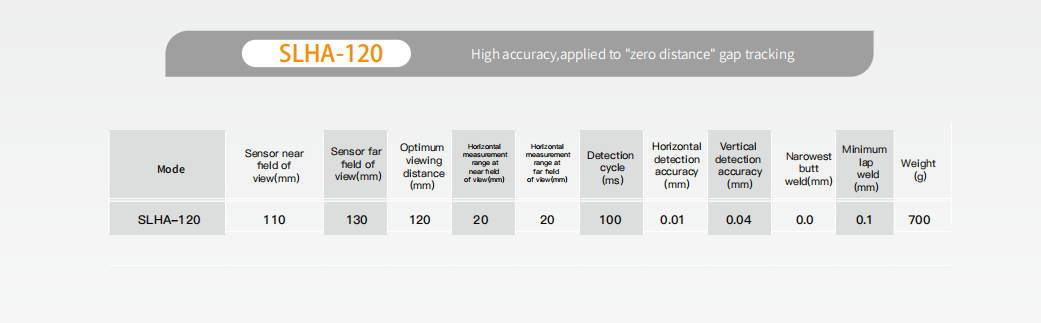
*ゼロギャップ検出とは、0.1mm未満のギャップを識別できる機能を備えたセンサーを指します。
*視界距離は参考値であり、ユーザーのニーズに応じて調整できます。
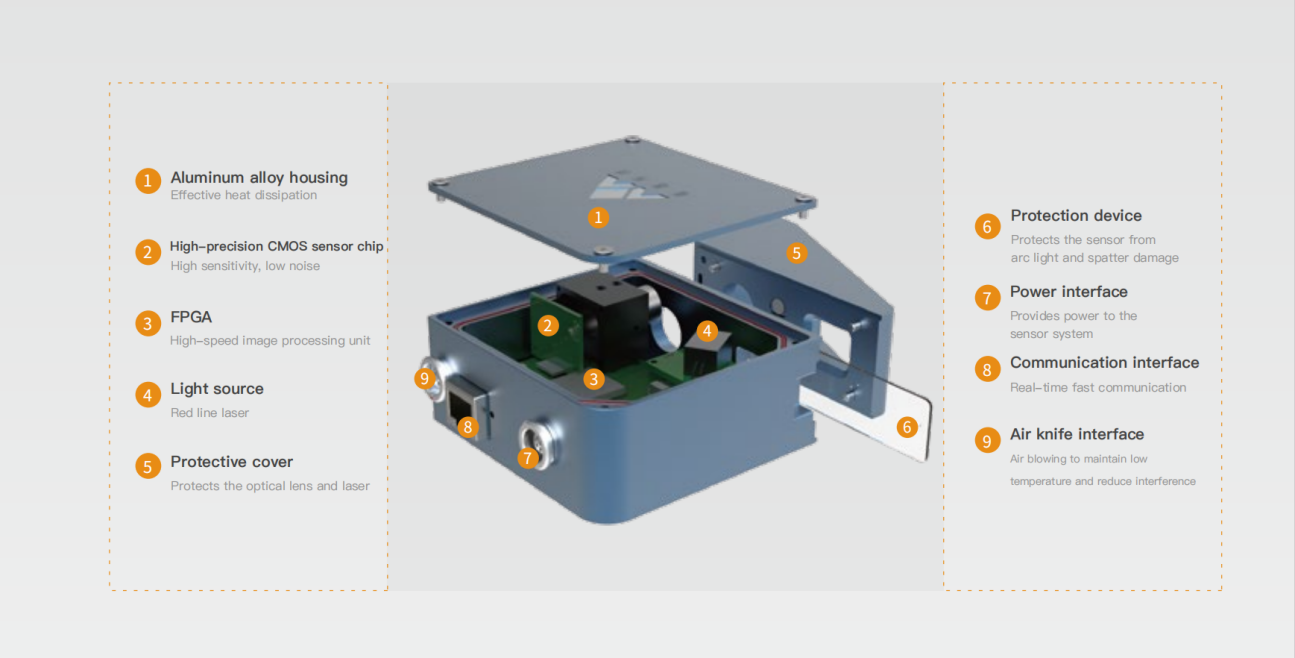
このセンサーは、迷光、水、ほこりの影響を受けず (IP67)、電磁放射線 (EMC) の影響を受けないため、最も要求の厳しいアプリケーションに適しています。
強力な機能を搭載。
01. 位置・偏差補正
位置決めおよび偏差補正機能は、同じモデルでありながら許容誤差が異なる異なるワークピースの柔軟な溶接シナリオに使用されます。この機能により、ワークピースの切り替え時に手動介入が不要になり、ロボットは位置決めおよび偏差補正システムによってガイドされ、正確な溶接を実現します。
直線 2D オフセット溶接に適した XNUMX 点位置決め。
マルチポイントポジショニング マルチセグメント2Dオフセット溶接に最適
セグメントの配置 複数セグメントの 3D オフセット溶接に適しています。
02 リアルタイムトラッキング
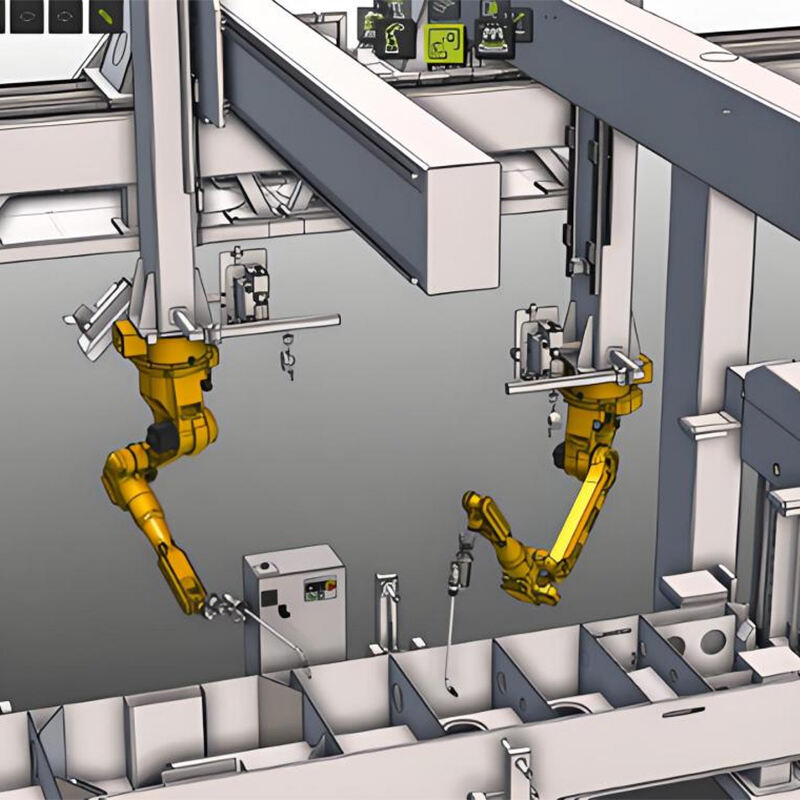
リアルタイムトラッキング機能は、高効率と空間干渉のない溶接シナリオで使用されます。センサーは溶接トーチに対して固定されており、溶接トーチは3D座標データに従って溶接パスを自動的に調整します。
03.スキャンと自動溶接
スキャンおよび自動溶接機能により、センサーは最初に溶接の幾何学的情報を収集できます。この機能は、反射率が高く、溶接スペースが狭い場合や、複雑な溶接シナリオに適しています。
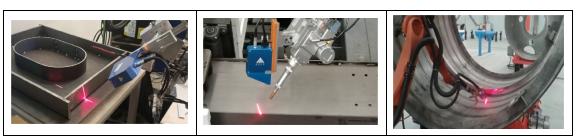
レーザーシームトラッキング
レーザーシームトラッキングは、高低および左右の溶接偏差を検出できます。
小さな隙間のある接合溶接を検出できます。
薄板接合における溶接継ぎ目トラッキングの問題を解決します。
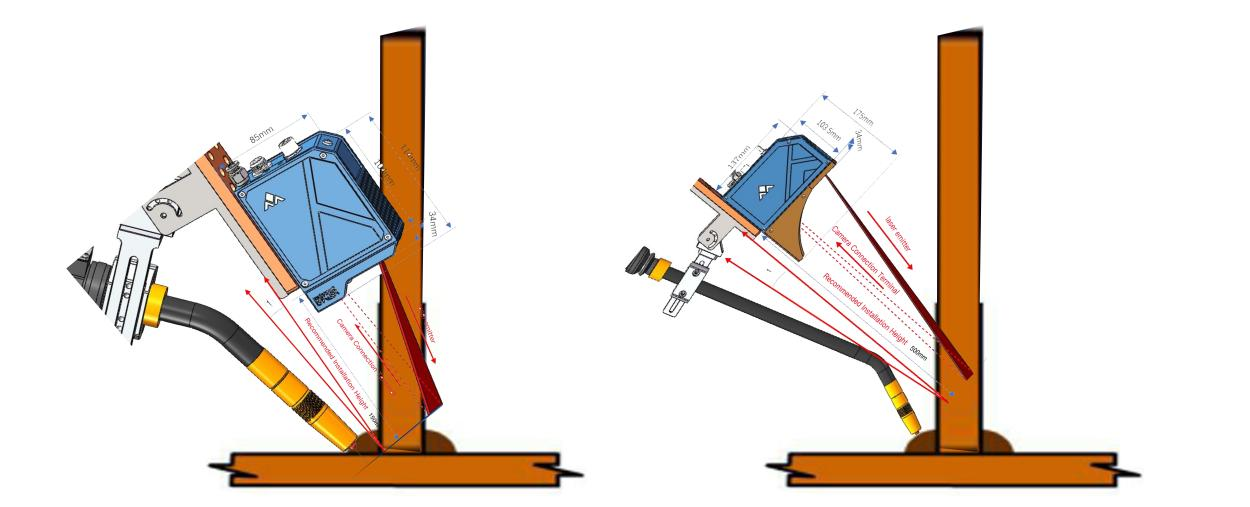
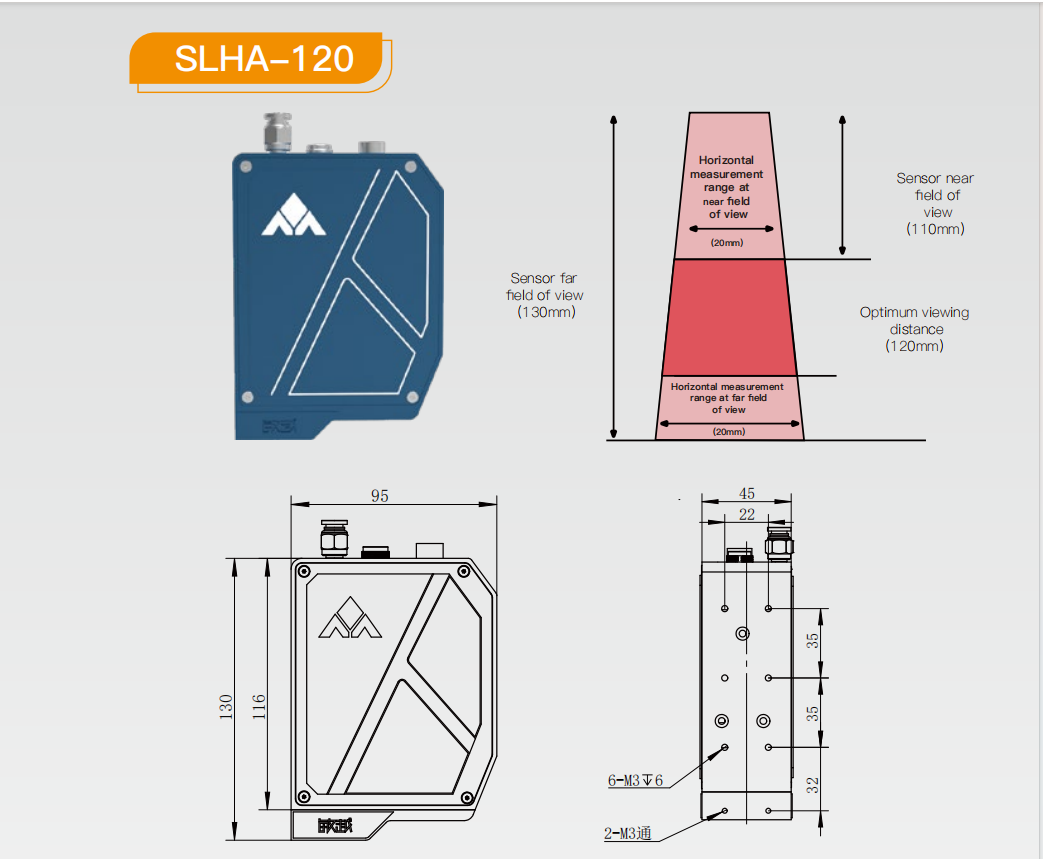
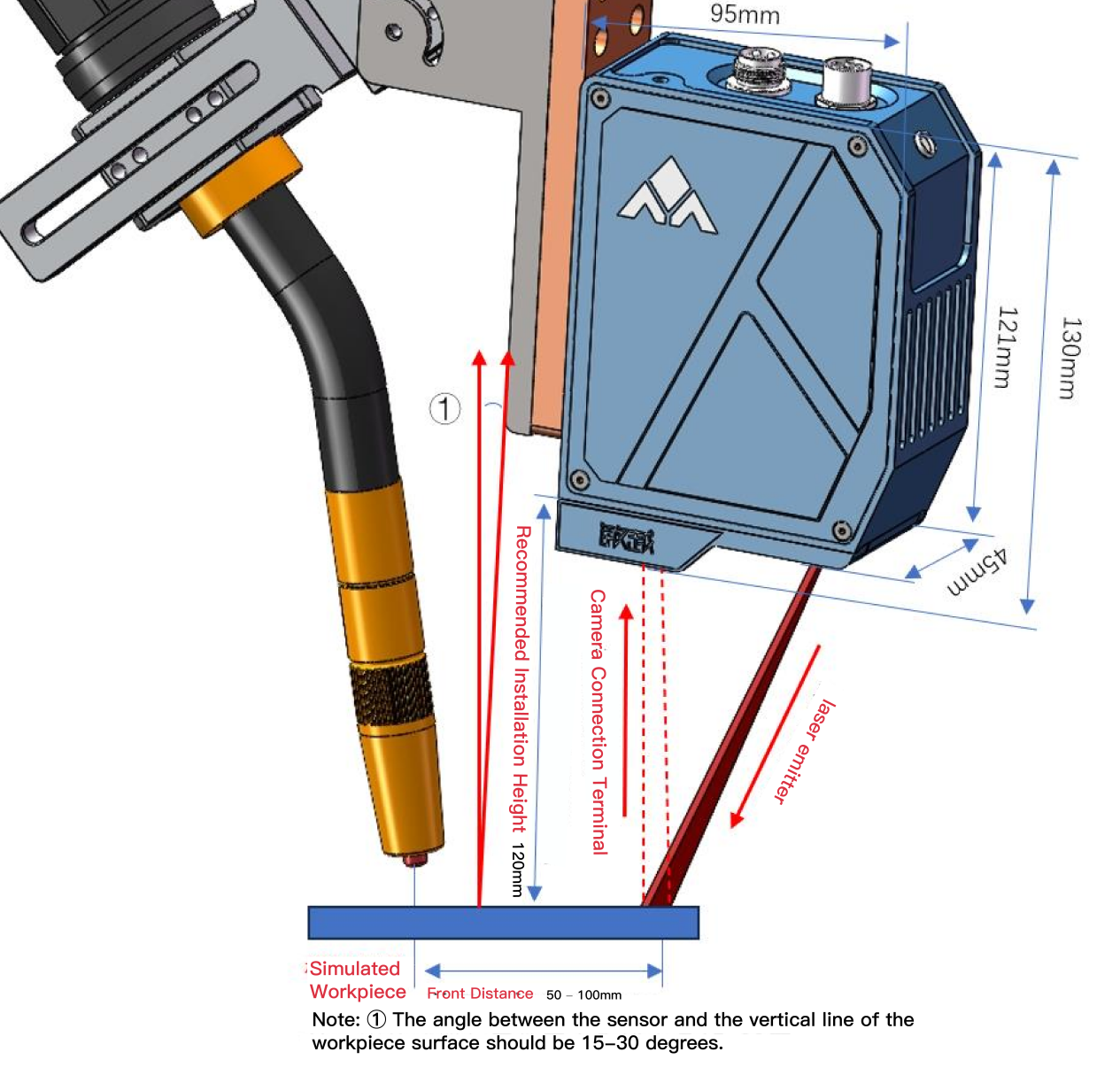
最適な観察距離は約120mmです。
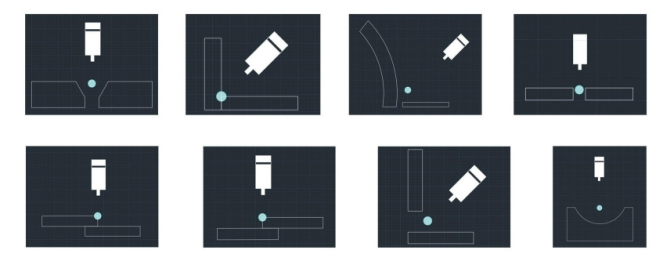
サポート溶接タイプ
V溝溶接
すみ肉溶接
ヘミング溶接
接合溶接
重ね溶接等
高精度、ゼロピッチ溶接。ステンレス鋼溶接業界に適しています。
実際の適用範囲に応じてタイプを合理的に選択してください。ワークピースの衝突センサーを回避するために、ロボットの負荷は通常 20KG 必要です。