 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


תחנת רובוט חיבור חכם על מסילת קרקע מסוג I עבור מבנה מתכת

רובוט ה땜 המונח על מסילת קרקע מותקן עם מערכת הbellion חכמה ללא טכנולוגיה ומעקב סדקי חזית גדול. הוא יכול להכניס ישירות את קבצי המודל התלת-מימדי של Tekla, SolidWorks או UG, להתאים ישירות את פרמטרי תהליך ההbellion, לזהות אוטומטית את מיקום ההbellion המדויק וליצור את תהליך ההbellion האופטימלי ביותר עבור הbellion.
ציר הליכת מסילת הקרקע מגדיל את התאימות לאורך. הרובוט יכול להתחבר למסילת הקרקע כדי להbellion שרוולים ארוכים יותר בבת אחת, והתחנה יכולה לעבוד משני צידי המסילה. הוא משמש בעיקר להbellion של לוחות ריבים של עמוד H, לוחות בסיס עמודים, לוחות תמיכה של גבישים, קורבלים ומבנים נוספים.
| רובוט | קבוצה אחת של רובוט Fanuc |
| מקור הכוח להbellion בבחירה | מכונה להbellion Aotai והכליות שלה או מכונה להbellion Megmeet והכליות שלה |
| מערכת הbellion | תוכנת תכנות מחוץ לקו ללא הוראה MINYUE, מערכת מעקב חזותי לייזר MINYUE. |
| מקרים מתאימים | مناسب ללוחות כיס, חלקים קורבל, חלקים מבניים קטנים וכו'. כיום ניתן להשתמש בו בעמודים הראשיים בצורת H והעמודים המשניים של מבני פלדה, יחידות לוחות קטנות ובינוניות של גשרים ימיים, עמודי פלדה בצורת H של ציוד, עמודי מדרגות של ציוד ומבנים אחרים. |
| מערכת ניקוי אקדח | מערכת ניקוי אקדח SC220A |
| אורך מסילת הקרקע | 6 מטרים (אופציונלי לפי המשתמש) |
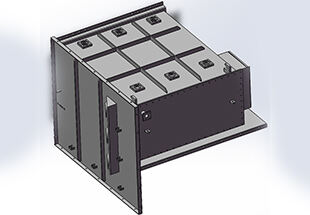
מערכת ניקוי אקדח
תחנת ניקוי האקדח SC220A היא מכשיר לניקוי אקדחי悍ה רובוטיים. הוא משמש לנקייה אוטומטית של שאריות ההדבקה מהאקדח במהלך תהליך חיבור הרובוט, חיתוך אוטומטי של חוטים, והגנה על נקבת האקדח וסניט המגע, מה שאורך את חיי השירות של האקדח ומציל כסף. זה מפחית את עלויות הצריכנים, שומר על איכות חיבור טובה, ומעלה את יעילות החיבור. פעולת פשוטה וקל לשימוש.
יתרונות של תחנות ניקוי אקדחים: 1. זמן ניקוי האקדח קצר והזמינות של המערכת גבוהה. 2. השלמת תהליך ניקוי האקדח באופן אוטומטי ללא פעולת ידנית. 3. מניעת בעיות איכות שנגרמות מזיהום במהלך ה땜. 4. מצוידים עם מחט קליברציה לרובוט TCP.
תוכנה לבגד רובוטי
התוכנה יכולה להוציא אוטומטית חיבורי בגד מהשרטוטים ללא סימון חיבור, מה שמצמצם את עומס העבודה של התערבות ידנית. בעזרת המנוע 3D הביצועי ומערכת הבקרת הרובוט, הנקודות שנוצרו אוטומטית מסימולטות וuchekered כדי למנוע התנגשויות בעבודהจริง.
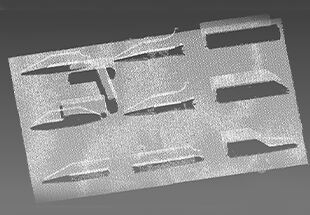
ואף ללא סוג שרטוט, מודל הפוך באמצעות סקנינג 3D, ייצור מהיר של שרטוטים 3D, ייצור אוטומטי של מסלול בגד עבור רובוט, אופטימיזציה של מסלול הבגד, חזותיות של מצב, ובדיקה אוטומטית של התנגשות ראש הבגד.
מעקב לייזרי LDWP-305
LDWP-305 הוא חיישן חכם לביצוע סקנינג של שרוול לحام. הוא מפיק מידע על תבנית השרוול באמצעות סקנינג לייזר בשורה, ומדריך את הרובוט או מכונת הלחימה להשלים את הלחימה באופן אוטומטי. פункциות איסוף התמונות, עיבוד והזיהוי של השרוול מתבצעות בתוך החיישן ללא צורך במחשב חיצוני. יש לו דרגה גבוהה של אינטגרציה ומעלה את עלויות החומרה הכוללות של המערכת. הוא מסוגל לעמוד בפני אור קשת ופיזור, מזהה חכם של שרוולים, והוא קל לשימוש. יש לו מבנה מeticulous, גודל צמוד, נגישות גבוה, ומגוון עשיר. ניתן לבחור ולהשתמש בו בהתאם למקרה השימוש, והפרמטרים המתאימים ביותר יכולים להיות מותאמים אישית.

יתרון
1. תומך בלימוד אוטומטי עבור מגוון מוצרים כמו לוחות כפולים, קורות טרסה, מחזיקים, חלוקי גשרים, ומושבי לוחות;
2. אין צורך לסמן חיבורים בשלב התכנון, והמיקום המבוקש של החיבור יכול להופק אוטומטית על ידי יבוא תרשימים ב-3D;
3. אין צורך בהשתתפות אנושית, הרובוט משלים אוטומטית פעולות כמו חזרה לאפס, מעבר, חיפוש מיקום, חיבור, ספירה וניקוי של הרגל;
4. אין צורך בפעולה מקומית, התוכנית יכולה להיווצר בכל זמן ובמקום, ויש≧将其远程发送 לרובוט לייצור לפי הזמן המוגדר;
5. תכנות לא-מקוון עצמאי, שימול 1:1 של תנועות הרובוט, מונע מראש התנגשויות ומאפשר להימנע מהתנגשויות;
6. טכנולוגיית תאומים דיגיטליים יכולה להציג את מסלול הרובוט, מתח החיבור, זרם, מהירות ומידע ייצור אחר בזמן אמת.
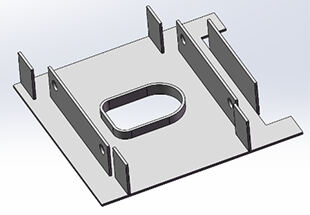
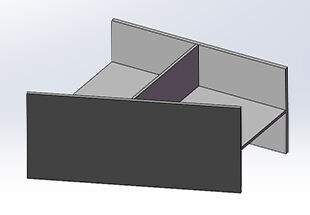
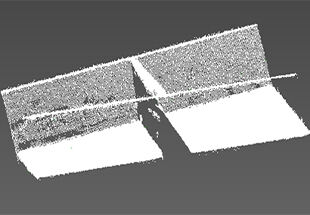
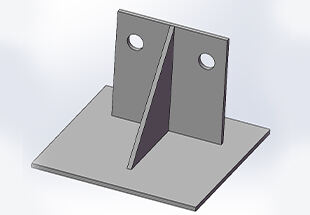
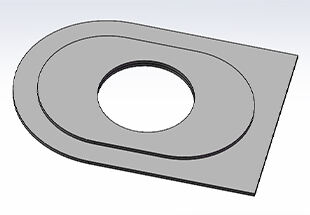
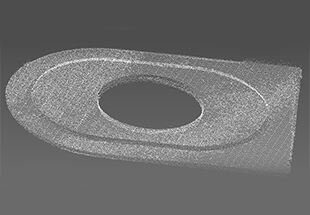
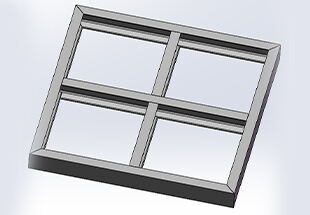
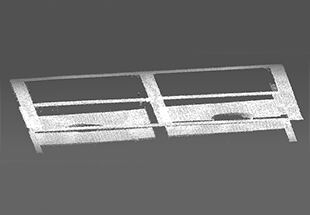
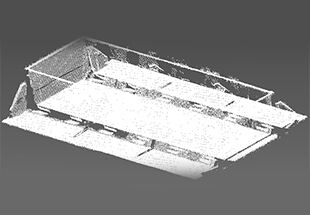
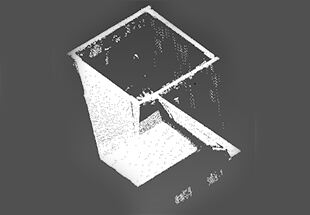
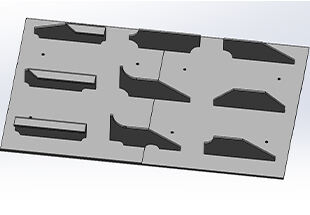
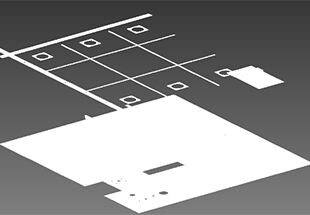
| לא | סוג חלק | תמונה של מודל חלק | תמונה של ענן נקודות של החלק |
| 1 | H Beam (כולל חיבורי קצה) | 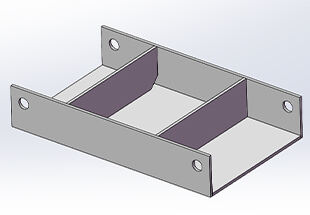 |
 |
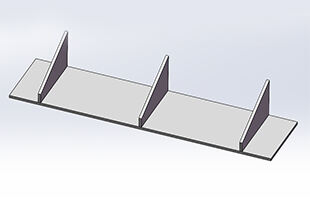
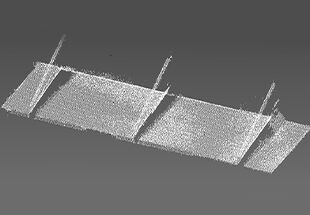
| 2 | יחידה של לוח |
 |
 |
| 3 | קשת פלדה |
 |
 |
| 4 | מעוגל |
 |
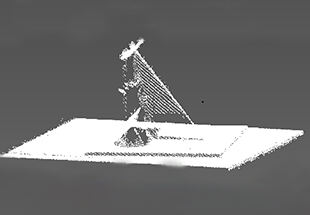 |
| 5 | לוח תמיכה לפירון |
 |
 |
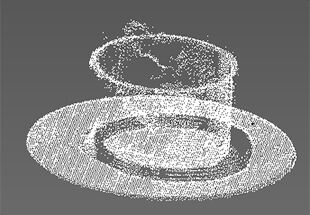
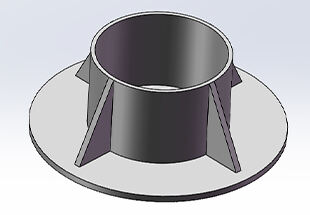
| 6 | בסיס צינור עגול |
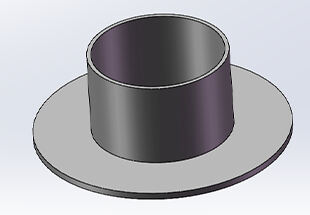 |
 |
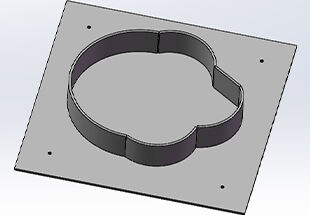
| 7 | בסיס צינור מעגלי בצורת צלב |
 |
 |
| 8 | שטח זר |
 |
 |
| 9 | לוח כפול שכבות |
 |
 |
| 10 | הרכבה של קתדרה |
 |
 |
| 11 | חיבור כפוף דו-elda | 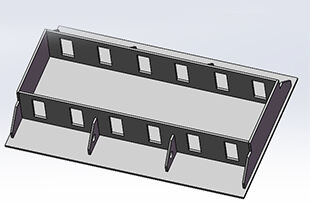 |
 |
| 12 | גשר תיבה |
 |
 |
| 13 | הנפשה חלולה למחצה |
 |
 |
| 14 | תיבה של טרנספורמציה |
 |
 |





