 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



SLHA-120 חיישן עקוב אחר קוי לייזר
עם תכונות מציאת מיקום, עקיבה בזמן אמת, סריקת ותהליך חיבור אוטומטי.
- סקירה
- תמיכה במרכב רובוט
censor לעקיבה על שוליים של לייזר משתמש בלייזר כדי להאיר את פני השוליה של החיבור, מה שיוצר פס אורות לייזר. זה מתקבל ותועתק על ידי מצלמה ברזולוציה גבוהה. באמצעות עיבוד אלגוריתמי, התכונות התלת-מימדיות של השוליה של החיבור מומרות למידע מבנה, כולל קואורדינטות של חיבור, אי-הסכמה, פערים וכו '. מידע זה נשלח למפעיל הרובוט, מספק לרובוט את המסלול והפרמטרים הדרושים של תהליך החיבור, מדריך את הרובוט לבצע חיבור או לתקן את סטיות הפיסות בזמן אמת, ומגשים חיבור מושלם. בהשוואה לפתרונות אחרים, עקיבה על שוליים של לייזר יש את יתרונות של לא מגע, דיוק גבוה, מהירות גבוהה ויכולת התאמה טובה.

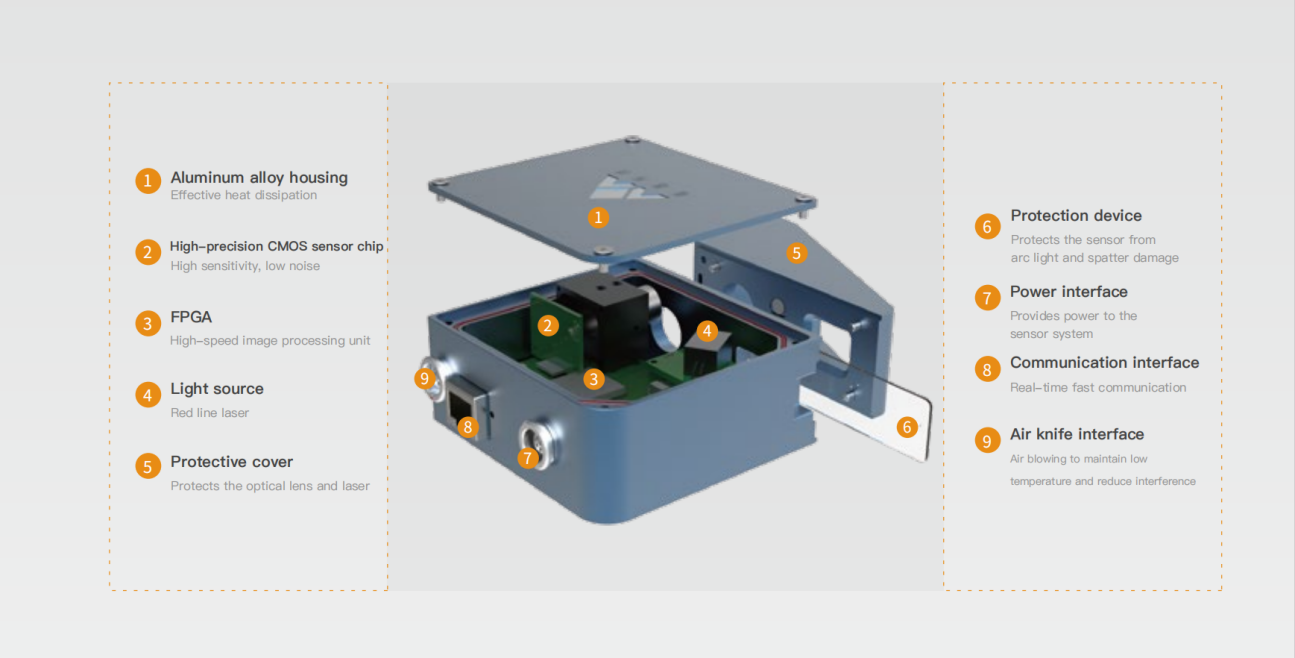
החיישן מאמץ מדידת אור מבנה ליניארי, שיש לו מהירות צילום קו מהירה, ללא מגע ולייבוש תנועה מכנית; התאמה חזקה, מסוגל להוציא פרמטרים של חיבור בדיה; שיכון מלא, עם מחשבים תעשייתיים חיצוניים ויתרונות רבים אחרים, הוא בשימוש נרחב בדיה אוטומטית מסוגים שונים. ללא קשר לתהליך הדיה, אנו יכולים לספק תמיכה אמינה וביצוע יציב כדי להבטיח תוצאות מצוינות בסצנרים שונים של דיה.
INTERFACE תוכנת גרפי מלא, תהליך הגדרת פרמטרים, פרטים בתפריט עזר, גם לא-מקצוענים יכולים להתחיל במהירות
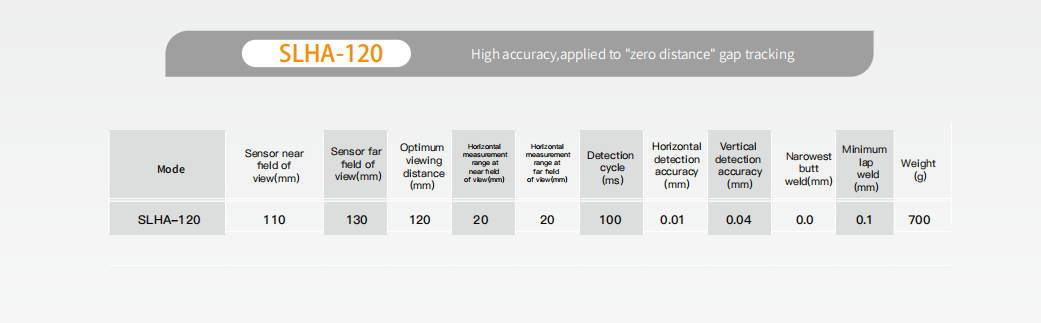
*גילוי ללא פערים מתייחס לחיישנים שמשתפים את הפונקציה הזו, שיוכלו לזהות פערים מתחת ל-0.1 מ"מ
*מרחק ראייה הוא להשוואה בלבד ועשוי להשתנות בהתאם לצרכים הספציפיים של המשתמש
החיישן מתאים לשימושים הקשוחים ביותר, מכיוון שהוא לא רגיש לאור זר, מים ועפר (IP67) והוא חסין מפני קרינה אלקטרומגנטית (EMC).
עם פונקציה חזקה.
01. תיקון מיקום ושגיאות
הפונקציה של הגדרת מיקום ותיקון השגיאות משמשת לסצנרים של דיה גמישה של חלקים שונים באותו מודל אך עם סטיות לא אחידות. הפונקציה הזו מבטיחה שלא יהיה צורך בהפרעה ידנית בעת החלפת החלקים והרובוט מודד על ידי מערכת הגדרת מיקום ותיקון השגיאות כדי להשיג דיה מדויקת.
הגדרת מיקום בשתי נקודות מתאימה לדיווחים ישרים 2D.
תנוחה מרובות נקודות מתאימה למחברות 2D מרובות קטעים עם פיצול.
תנוחה של קטעים מתאימה למחברות 3D מרובות קטעים עם פיצול.
02 עקיבה בזמן אמת
הכלי שלעקיבה בזמן אמת משמש בתרחישי חיבור המצריכים יעילות גבוהה ובלעדם התערבות חללית. חיישן מוצב באופן קבוע ביחס לפיסת החיבור, והפיסת חיבור מעדכנת את נתיב החיבור אוטומטית על פי נתוני הקואורדינטות ה-3D.
03. סריקה וחיבור אוטומטי
הכלי לסריקה וחיבור אוטומטי מאפשר לחיישן לאסוף תחילה מידע גיאומטרי על המחברים. הכלי זה מתאים לחיבורים במרחבים צרים בעלי השתקה גבוהה ותרחישי חיבור מורכבים.
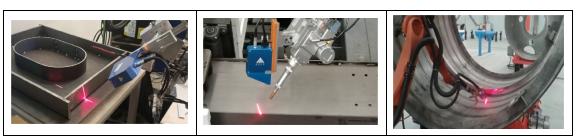
עקיבה אחר קרום באמצעות לייזר
עקיבה אחר קרום באמצעות לייזר יכולה להזדהות עם שגיאות מחברים גבוהות, נמוכות, ושמאליות/ימניות.
יכולה לזהות מחברים עם פערים קטנים.
פותחת את בעיית עקיבה אחר קרום חיבור עבור לוחות דקים עם מחברים.
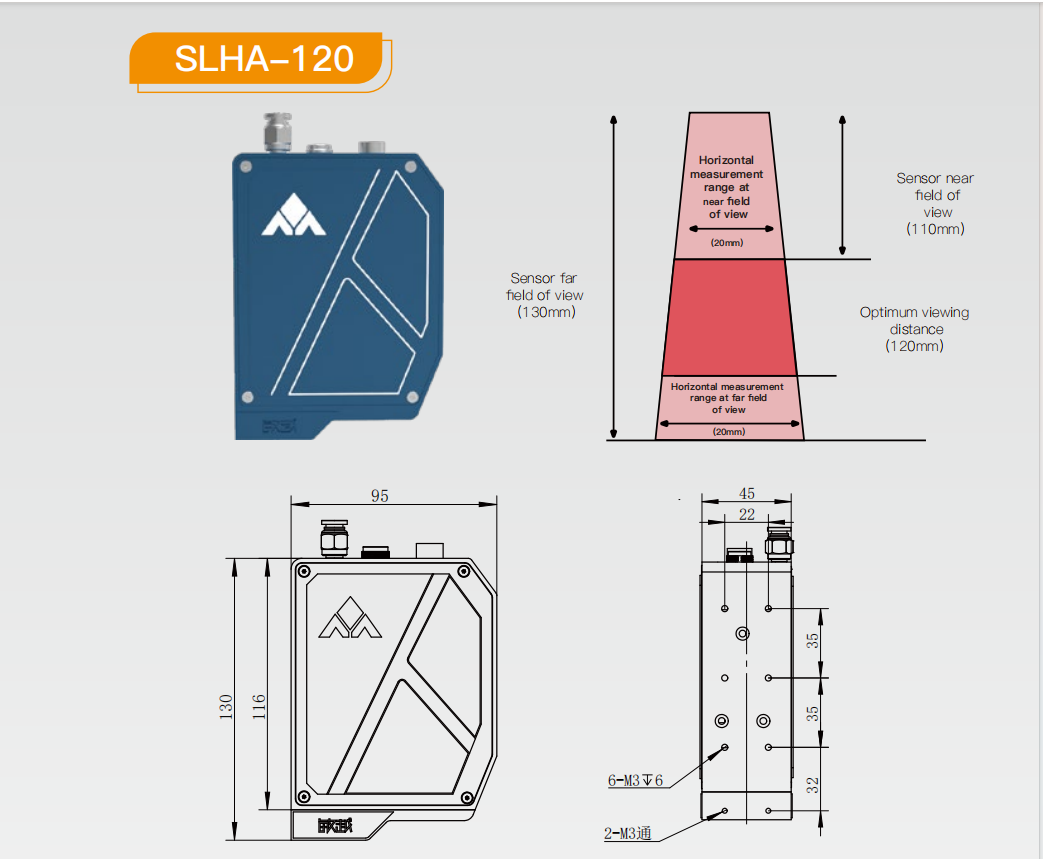
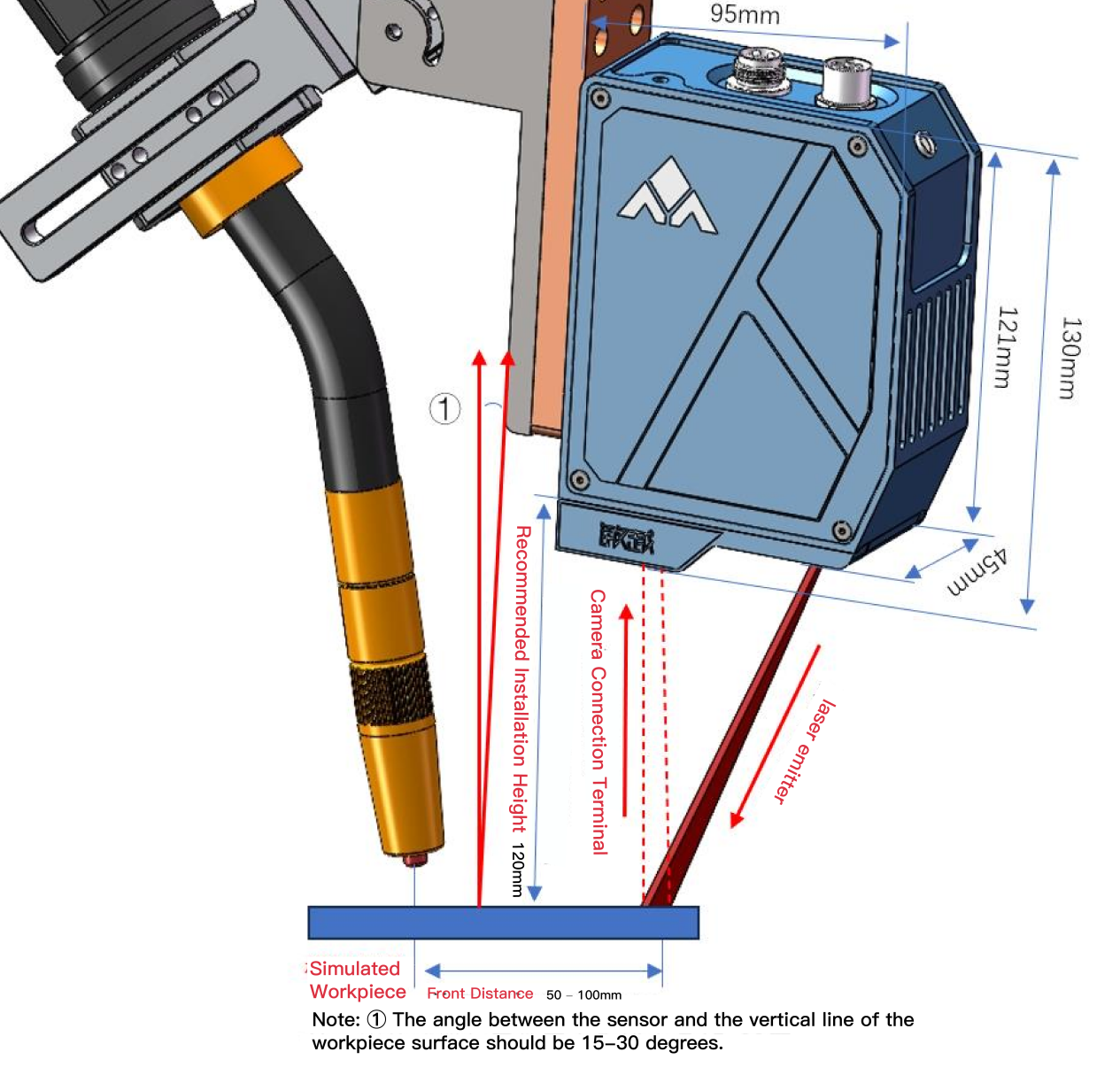
המרחק האופטימלי לצפייה הוא כ-120 מ"מ.
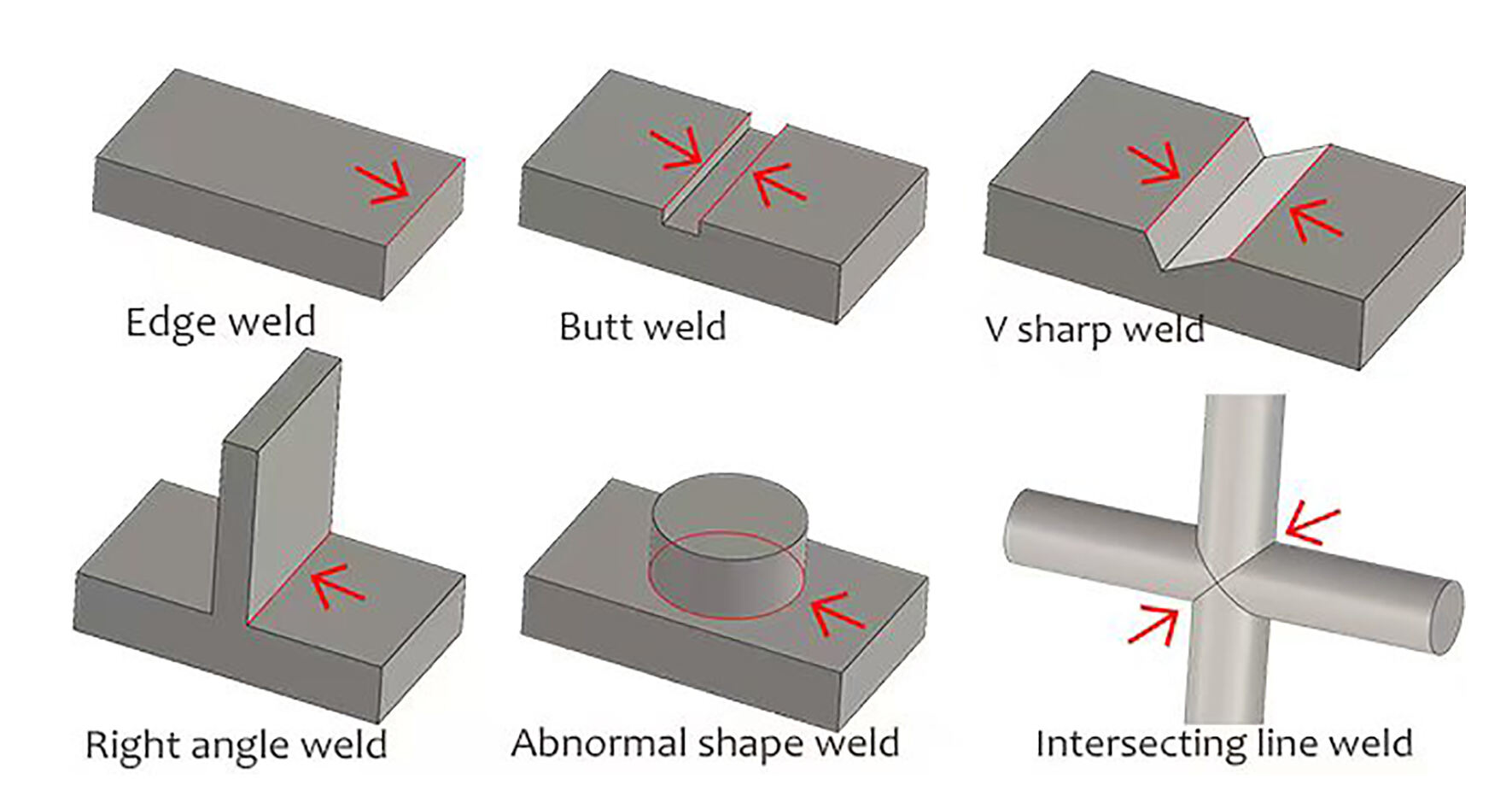
סוג חיבור דיווeld
חיבור V-groove
חיבור פילט
חיבור הימינג
חיבור שפיפון
חיבורי לף וכו'.
דיוק גבוה, חיבורים ללא זווית. מתאים לתעשייה של חיבור מתכתainless.
עם אור לייזר כחול להחזרה גבוהה של אור, ובסביבה מאורה. תכנון מיוחד לתהליך דבקת לייזר של אלומיניום ותהליך דבקה של סגסוגות אלומיניום.
אנא בחרו את הסוג בצורה הגיונית בהתאם להיקף האפליקציה הפועל, כדי להימנע מהתנגשות בין חלקים לסנזור, בדרך כלל העומס של הרובוט צריך להיות 20KG.
שותף לשיתוף פעולה

תמיכה במרכב רובוט







