EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- Panoramica
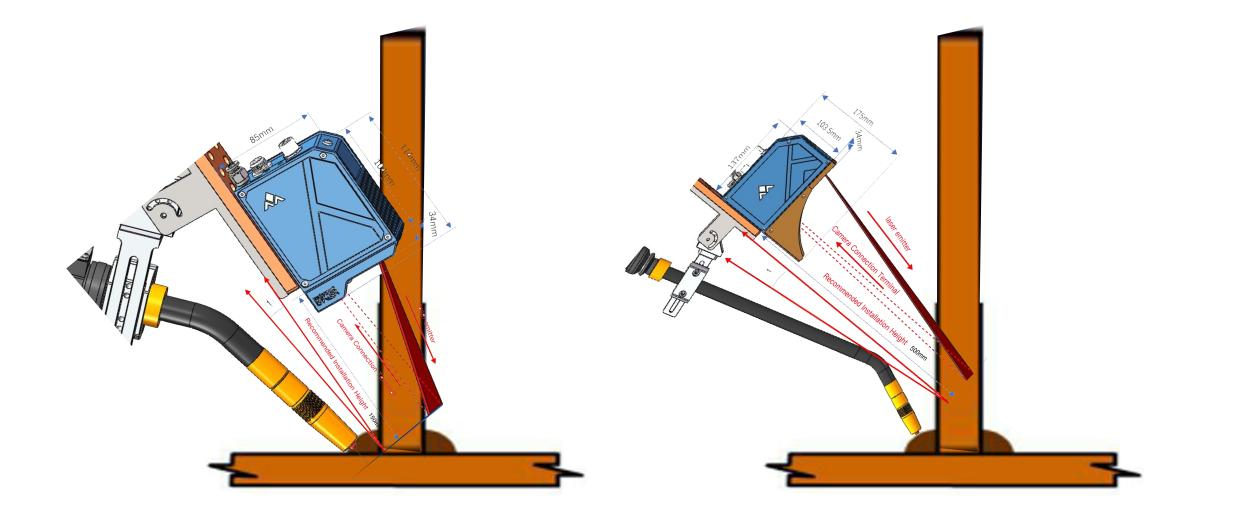
Il sensore di tracciamento a laser utilizza un laser per irradiare la superficie del filo di saldatura, formando una banda di luce laser, che viene ricevuta e immaginata da una telecamera ad alta definizione. Attraverso il trattamento algoritmico, le caratteristiche tridimensionali del filo di saldatura vengono trasformate in informazioni strutturate, incluse le coordinate della giunzione di saldatura, i disallineamenti, gli spazi vuoti, ecc. Queste informazioni vengono trasmesse al controllore del robot, fornendo al robot la traiettoria e i parametri di processo richiesti per il saldataggio, guidando il robot a saldare o correggere le deviazioni delle parti in tempo reale, raggiungendo un lavoro di saldatura perfetto. Rispetto ad altre soluzioni, il tracciamento a laser offre i vantaggi di non-contatto, alta precisione, velocità elevata e buona adattabilità.
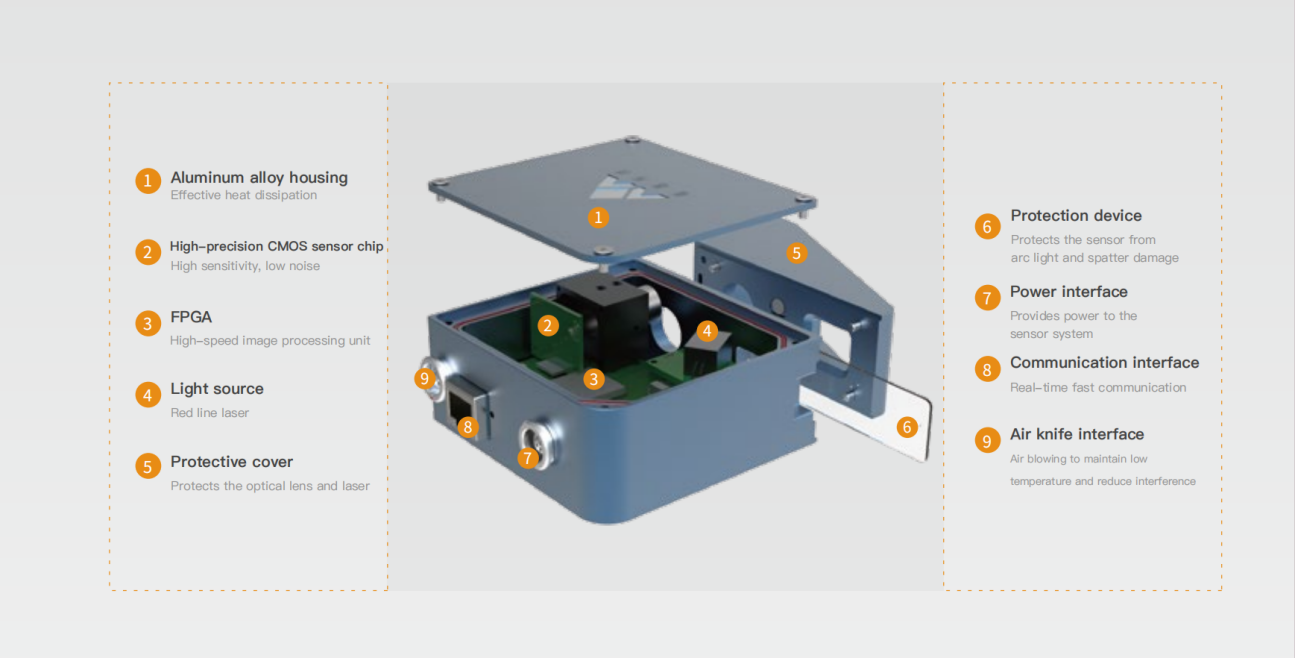
Il sensore adotta la misurazione con luce strutturata lineare, che ha una velocità di imaging a linea rapida, nessun contatto e nessun movimento meccanico; forte capacità di adattamento, in grado di fornire parametri del saldatore; completamente incorporato, con computer industriali esterni e molti altri vantaggi, è ampiamente utilizzato in diversi tipi di saldatura automatizzata. Indipendentemente dal processo di saldatura, possiamo fornire un supporto affidabile e prestazioni stabili per garantire ottimi risultati in diverse situazioni di saldatura.
Interfaccia software grafica completa, processo di impostazione dei parametri, dettagli del menu di aiuto, anche i non professionisti possono avviarsi rapidamente
*La rilevazione di gap zero si riferisce ai sensori dotati di questa funzione, che possono essere utilizzati per identificare interstizi inferiori a 0,1 mm
*La distanza di visuale è solo a titolo indicativo e può essere ajustata in base alle esigenze specifiche dell'utente
Il sensore è adatto alle applicazioni più esigenti, poiché è insensibile alla luce stray, all'acqua e alla polvere (IP67) ed immune alle radiazioni elettromagnetiche (EMC).
Con Funzione Potente.
01. correzione della posizione e del deviazione
La funzione di correzione della posizione e della deviazione viene utilizzata per scenari di saldatura flessibile di differenti pezzi dello stesso modello ma con tolleranze non allineate. Questa funzione garantisce che non sia richiesto alcun intervento manuale durante il cambio dei pezzi, e il robot è guidato dal sistema di correzione della posizione e della deviazione per ottenere una saldatura precisa.
Posizionamento a due punti adatto per saldature 2D offset rettilinee.
Posizionamento Multi-Punto Adatto per saldature 2D a tratti multi-segmento.
Posizionamento a Segmenti Adatto per saldature 3D a tratti multi-segmento.
02 Seguimento in Tempo Reale
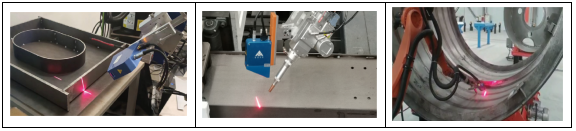
La funzione di tracking in tempo reale viene utilizzata in scenari di saldatura che richiedono alta efficienza e nessuna interferenza spaziale. Il sensore è fissato in posizione relativa rispetto alla torcia da saldare, e la torcia da saldatura regola automaticamente il percorso di saldatura in base ai dati delle coordinate 3D.
03.Scansione e Saldatura Automatica
La funzione di scansione e saldatura automatica consente al sensore di raccogliere prima le informazioni geometriche delle saldature. Questa funzione è adatta per ambienti di saldatura con superfici altamente riflettenti, spazi angusti e scenari di saldatura complessi.
Tracciamento del Filo Laser
Il Tracciamento del Filo Laser può rilevare deviazioni delle saldature in altezza, bassa e laterali.
Può rilevare saldature con giunti stretti.
Risolve il problema del tracciamento della saldatura per la congiunzione di lastre sottili.
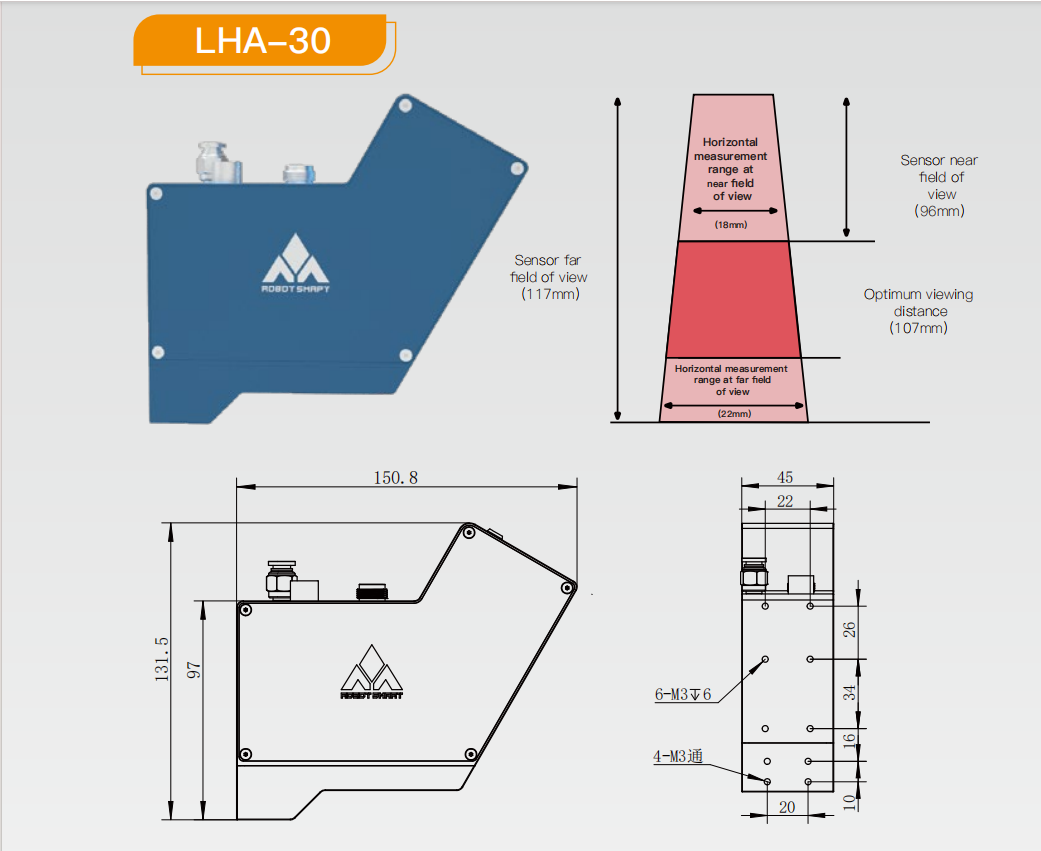
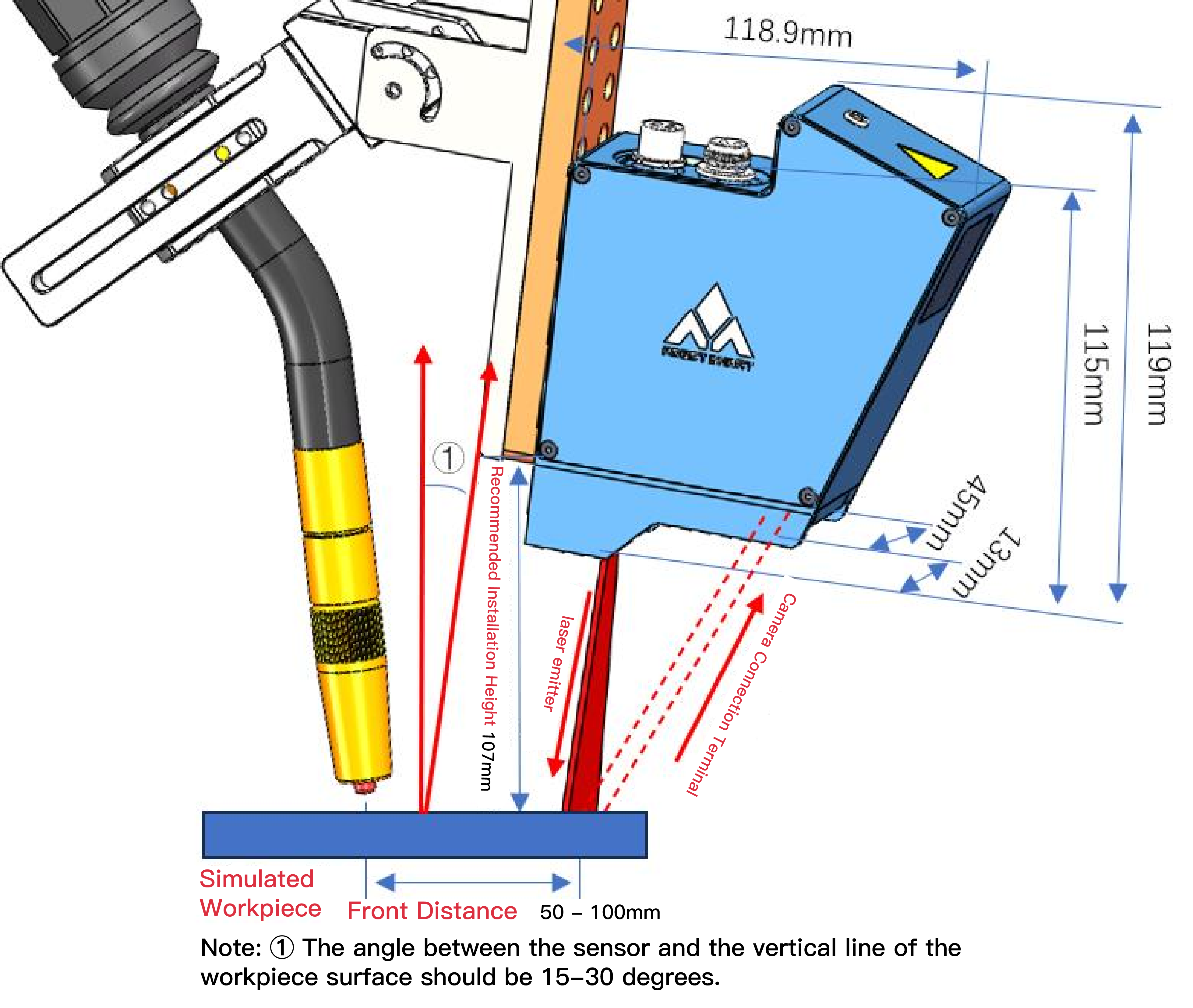
La distanza di osservazione ottimale è circa 107mm.
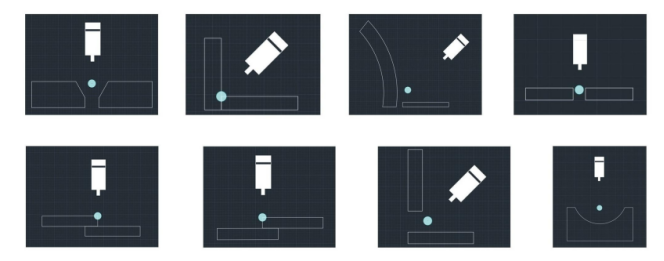
Tipo di saldatura supportato
Saldatura a V
Saldatura a staffa
Saldatura a raccordo
Saldatura a sovrapposizione
Saldature a lap, ecc.
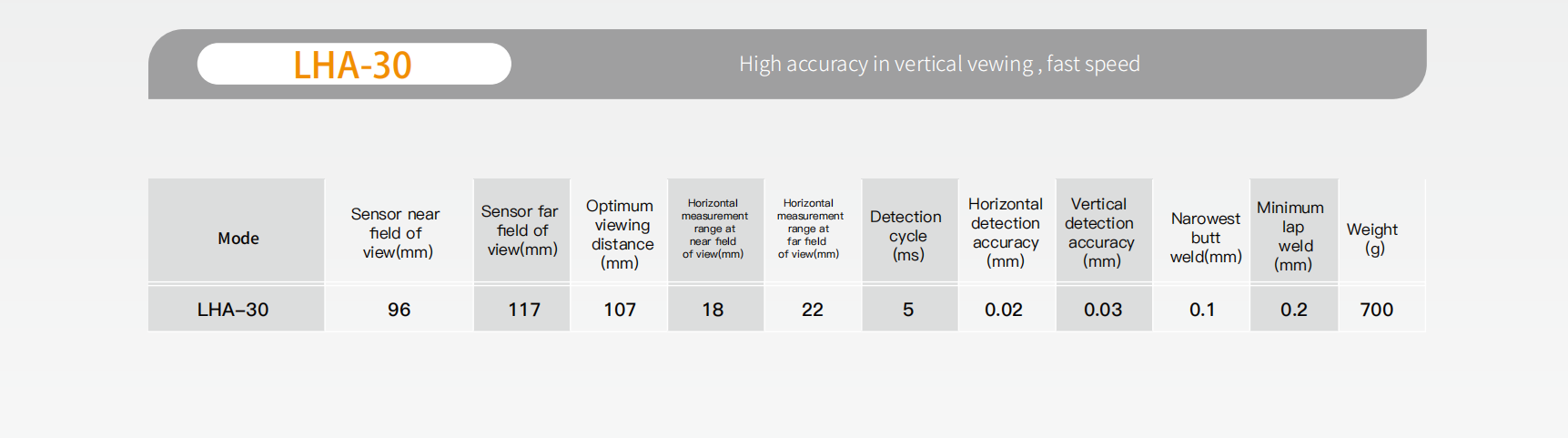
Alta precisione verticale, velocità di reazione elevata, adatta per l'industria delle Costruzioni in Acciaio e dei Macchinari da Costruzione.
Si prega di selezionare il tipo in modo ragionevole in base all'effettivo ambito di applicazione, per evitare collisioni tra il sensore e il pezzo lavorato; generalmente il carico del robot deve essere di 20KG.