EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


Հեռացված ծրագիր Ինտելիջենտ Ռոբոտային Վարդապետության สเต이션
“Beijing Minyue Technology Co.,Ltd ”Դիմում է Չինաստանի առաջնությամբ հիմնավորված բարձր տեխնոլոգիայի կազմակերպությունը՝ ոչ- տարածում ինդուստրիալ ռոբոտների ինտելեկտուալության մասին . Կենտրոնացված է սեփական համարժեքով RobotSmart-ինտելեկտուալ որոշումների համակարգի, SmartVision- երկու կառուցվածքային լույսի տեսական համակարգի, SmartEye - ablur հետևության հետևանքի համակարգի վրա, Առաջարկում է նոր գեների ինտելեկտուալ ռոբոտների ոչ դասավանդման հաղորդագրության և սահքման լուծումներ։
Մեր ընկերությունը ունի մի միջազգային R&D թիմ մագիստրանոսների և դոկտորական տեխնիկական 專家ներից գրաֆիկների և ավտոմատացման ոլորտներում: Մեր մասնակիցների 90%-ն ունեն մագիստրական աստիճան կամ ավելի բարձր։
Մասնավորապես մատակարարելով ռոբոտային կառավարման, ալգորիթմների և մարդ-ռոբոտ փոխազդեցության ոլորտներում, մենք հանգում ենք ավելի լավ ռոբոտային ինտելեկտուալ լուծումներ բերելու համար համաշխարհային արդյունաբերության ոլորտին:
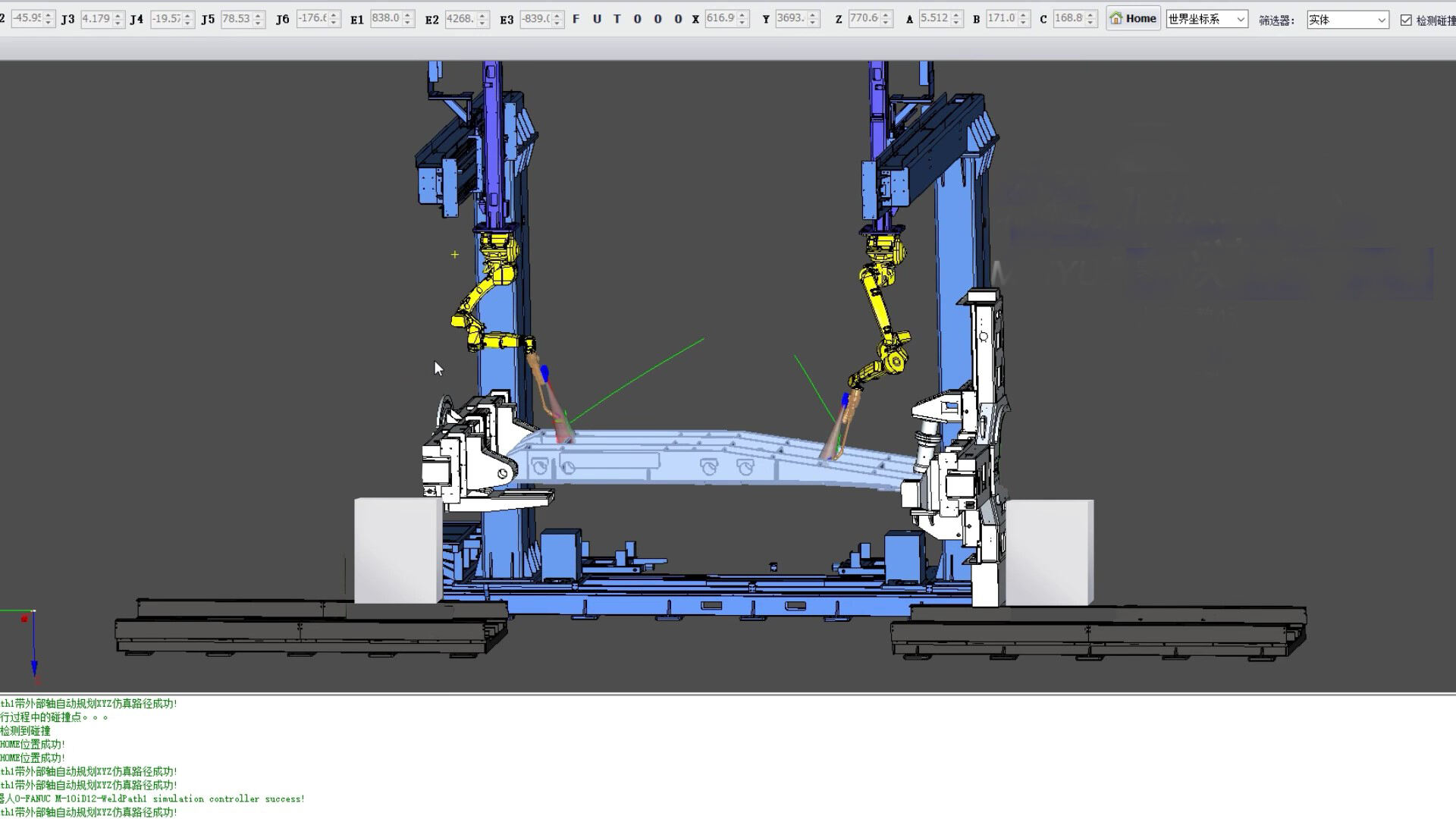
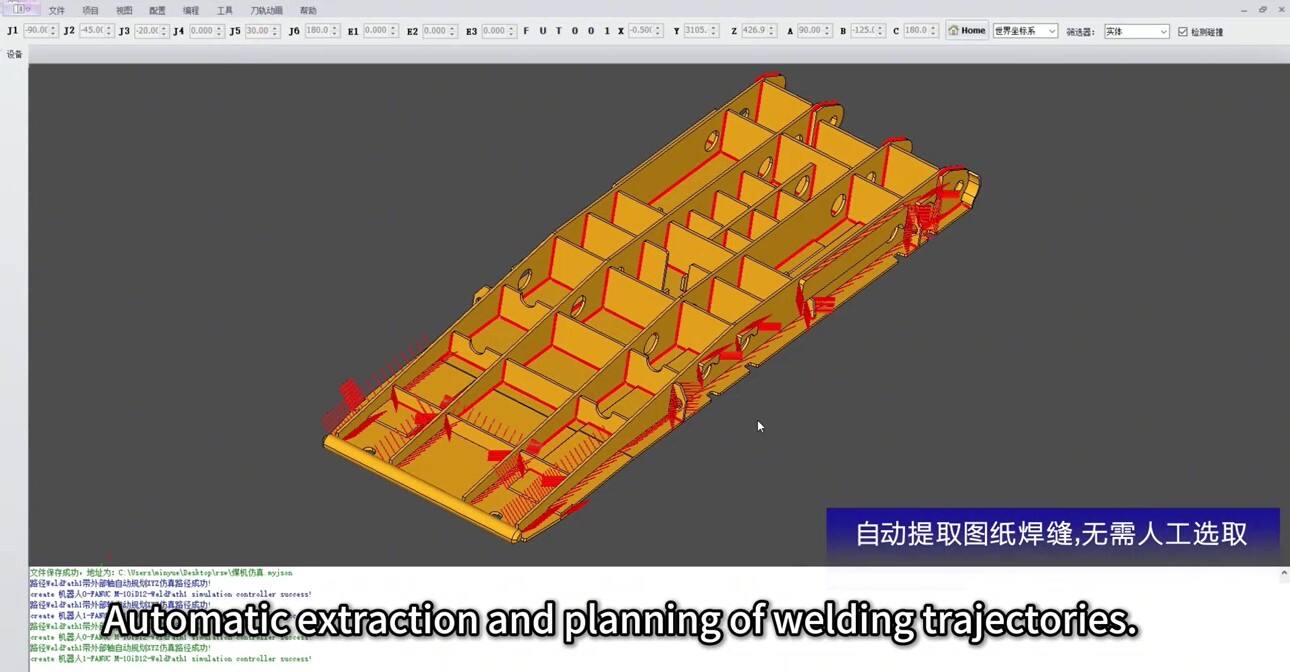
Օգտագործողի կողմից 3D աշխատանքային մոդելը իմպորտացիան RobotSmart- ինտելեկտուալ որոշման համակարգի մեջ, ծրագիրը կարող է արագ և ավտոմատ ձևով ստեղծել արդյունաբերության ռոբոտների շարժման կոդ, ինչպես նաև կարող է իրականացնել ռոբոտի շարժման սիմուլյացիա, հաaneanային անվտանգության ստորագրում, խարաների հեռացում, տраյեկտորիայի պլանավորում, միակության հեռացում և առանց սահմանափակումների առանց առանց առանց առանց առանց առանց առանց։
Երթուղին նոր ուղղությամբ, լուծում ենք ոլորտի խնդիրները:
Կոլ մաշինագրական հիդրավլիկական աջակցություն 悍icutման խնդիրները, արդյունաբերության վերարժեքավորման ազդեցություն
Հիդրավլիկ հեռանքի հիմնական կառուցավորման մասերի կշիռը, որը ընդհանուրապես օգտագործվում է угольной машиностроительной промышленности, կարող է գերազանցել 20 տոննան։ Այդ մասերի շատերն են տուփաձև կառուցված միջին-հաստ սալերից կապումով։ Դա հիդրավլիկ հեռանքի հիմնական մասն է, որը կունենա անկախ բեռների և հարվածումների դեմ։ Հիդրավլիկ հեռանքները ներկայացված են կարճ, երրորդական կապումներով։
Ən az 1000-dən çox suveldirme . և այդ մասերի շատերն են միջին-հաստ սալերի բազմաշերտ բազմանցումների կապում։ Կապումը խտություն ունի, կապումի հասանելիությունը վատ է, իսկ դրա կապումի որակը прямыми образом ազդում է վարունգի ան전 արտադրության վրա։
Նրա կառուցվածքի հատուկ բնությունը և տեխնոլոգիական բարդությունները հանգեցնում են այն, որ ձեռնարկային կապումը չի կարող ապահովել կապումի կայունությունը և կապումի որակի համատեղափոխությունը։
Օգտագործում են սովորական ռոբոտական կապում։
- Տարածում ծրագրավորում, r պահանջում է կանգ և ցանկացած դեպքում ցածր ռոբոտի օգտագործում։
- Կառուցվածքը բարդ է՝ տարածքներից կազմված, տարբեր չափերով, և ավելի 1000-ից կապումներով, պետք է վարունգը 5 օր է։ սովորեցնել ծրագրավորում ձեռքով:
- Աշխատանքի կտորի տեղադրման եւ հավաքման ճշգրտությունը չի կարող բավարարել պահանջները, եւ կենտրոնացված լվացման ջերմային դեֆորմացիայի խնդիրը տեղական լվացման պատճառով առաջացնում է լվացման շեղում:
- Շատ դժվար է իրականացնել ռոբոտային լվացման ավտոմատացման ամբողջ հիդրավլիկ աջակցություն կառուցվածքի մասեր:
Խարխաղային մեքենաների արդյունաբերության առաջատար ընկերություն, որն ընդունում է Minyue Technology- ի մեկ կոճակով մեկնարկը, ոչ ուսուցողական ինտելեկտուալ լվացքի լուծումը:
Քայլ 1. Մեր հաճախորդը ներմուծում է 3D աշխատանքային մասի մոդելը RobotSmart - Intelligent Decision System- ում:
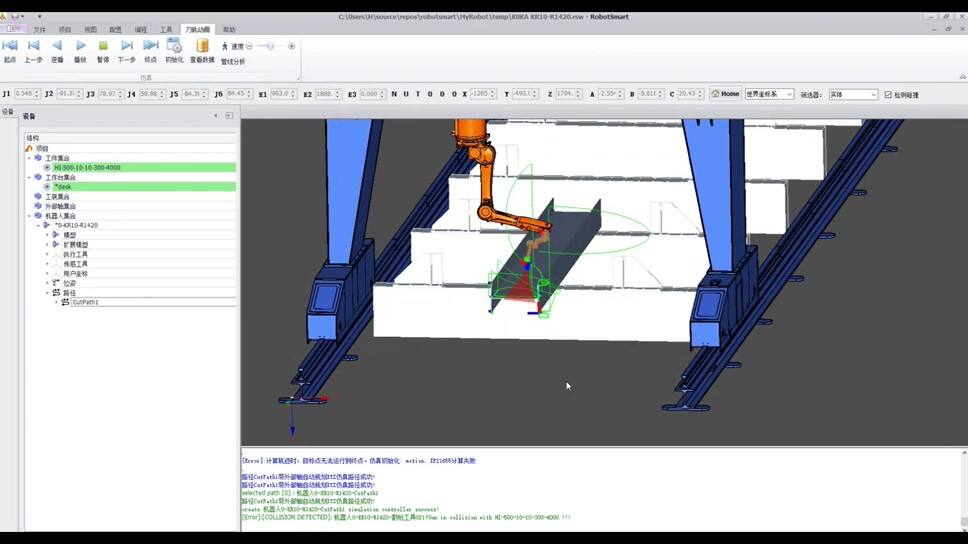
RobotSmart-ինտելեկտուալ որոշումների համակարգը, որը կարող է արագ և ավտոմատ ստեղծել արդյոքական ռոբոտի տրայեկտորիան և նպատակահայտ կարող է իրականացնել ռոբոտի շարժման սիմուլյացիա, համադրության ստորոգում, միակության հեռացում և առանց սահմանափակում։
Քայլ 3: SmartVision-3D երկանիստ կառուցվածքային լույսի նկատմամբ համակարգը կատարում է աշխատանքային մասի պարզ դիրքավորում։ Երկանիստ կառուցվածքային լույսի նկատմամբ համակարգը սկանավորում է աշխատանքային մասի մակերևույթը և կատարում է հակադրամում մոդելավորման գործընթացը կետերի անամնեզի տվյալներից։ Վերականգնում է աշխատանքային մասի մակերևույթի 특ուիքները մոդելավորման ճշգրտությամբ ներս ± 5 մմ։ Ստորագրման ճշգրտություն՝ 40 մմ-ի շերջակայքում աշխատանքային մասի ժողովուրդում և սկզբնական դիրքավորման ժամանակ ,Ստորագրում է ժողովուրդի անկյունը 10-ի ներսում °。 Ստորագրում է հավասարակշռված փոփոխությունները 30 մմ (կարելի է կարգավորել) 。
Քայլ 4: SmartEye - ablur նկատմամբ հետևանքային համակարգ։ Սկանավորում է հավասարակշռված հատվածը, հաստատում է հավասարակշռված հատվածի դիրքը և տեղեկատվությունը, ուղղում է 3D թվային մոդելը և իրական աշխատանքային մասի հավասարակշռված հատվածի դիրքը, ստացված իրական հավասարակշռված հատվածի տվյալները։ Համաձայնություն ունի բազմատարած ռոբոտների, բազմատարած արտաքին առանցքների և դիրքավորում համատեղելի աշխատանք։
SmartVision-3D երկանիստ կառուցվածքային լույսի նկատմամբ համակարգը ներմուծում է 3D մոդելների նկարները ,Ստացված 3D կետերի անամնեզի տվյալները համեմատում են 3D թվային մոդելի տվյալների հետ ,Ռոբոտը կապում է միայն կապեր 3D կետերի ավելացումով: Երբ սենսորի կողմից ստացված կետերի ավելացումը համընկնում է 3D մոդելի հետ, որը ստացվել է նոր կոմպոնենտներով արտագրված աշխատանքային մասում, արտագրված կոմպոնենտները կապվում են:
Իրականում միացվում է ստանդարտ սկիզբ ստեղծելու համար, 2 րոպեում սկսվում է արքի սկիզբ, արագ, ճշգրիտ, լինելով անտեսացվում ծրագրավորման, բարձր արդյունավետությամբ և բարձր ճշգրտությամբ.
Տեխնոլոգիան առաջնորդում է, գործնականությունը դիտարկում է: