EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



- Overview
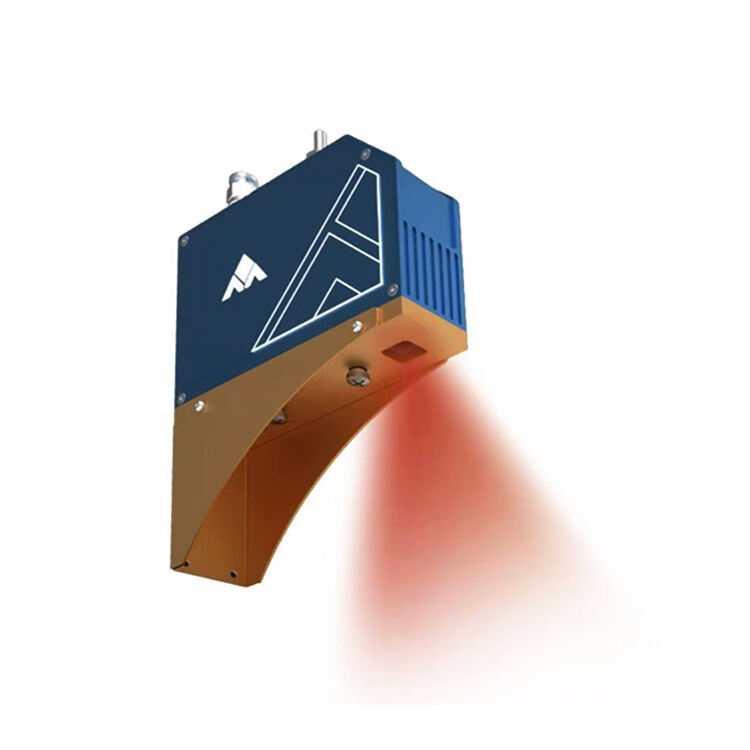
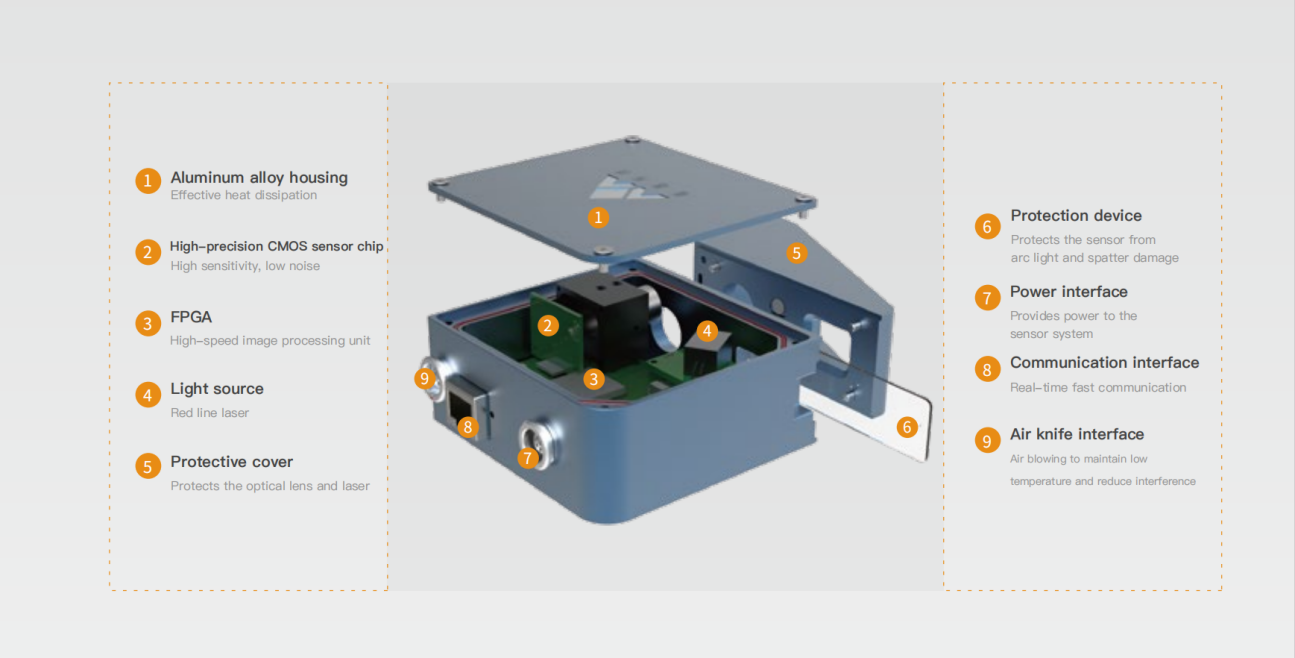
Լազերային կարի հետագծման սենսորն օգտագործում է լազեր՝ եռակցման կարի մակերեսը ճառագայթելու համար՝ ձևավորելով լազերային լույսի գոտի, որն ընդունվում և պատկերվում է բարձր հստակությամբ տեսախցիկով: Ալգորիթմական մշակման միջոցով եռակցման կարի եռաչափ առանձնահատկությունները վերածվում են կառուցվածքային տեղեկատվության՝ ներառյալ եռակցման միացությունների կոորդինատները, սխալ դասավորությունը, բացերը և այլն: Համեմատած այլ լուծումների հետ՝ լազերային կարի հետևումն ունի ոչ կոնտակտային, բարձր ճշգրտության, արագ արագության և լավ հարմարվողականության առավելություններ:

Սենսորը ընդունում է գծային կառուցվածքային լույսի չափում, որն ունի արագ գծի պատկերման արագություն, առանց շփման և մեխանիկական շարժումների. Ուժեղ հարմարվողականություն, որը կարող է դուրս բերել եռակցման կարի պարամետրերը; Լիովին ներկառուցված, արտաքին արդյունաբերական կառավարման համակարգիչներով և բազմաթիվ այլ առավելություններով, այն լայնորեն օգտագործվում է տարբեր տեսակի ավտոմատացված եռակցման մեջ: Անկախ եռակցման գործընթացից, մենք կարող ենք ապահովել հուսալի աջակցություն և կայուն կատարում՝ եռակցման տարբեր սցենարներում գերազանց արդյունքներ ապահովելու համար:
Ծրագրաշարի ամբողջական գրաֆիկական ինտերֆեյս, պարամետրերի կարգավորման գործընթաց, օգնության մենյուի մանրամասներ, ոչ պրոֆեսիոնալները նույնպես կարող են արագ սկսել
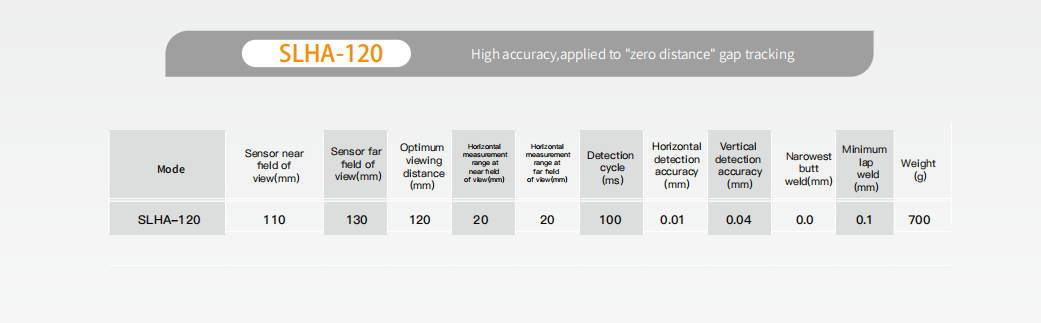
*Զրոյական բացերի հայտնաբերումը վերաբերում է այս գործառույթով հագեցած սենսորներին, որոնք կարող են օգտագործվել 0.1 մմ-ից ցածր բացերը հայտնաբերելու համար:
* Տեսողության հեռավորությունը միայն հղման համար է և կարող է ճշգրտվել՝ ըստ օգտագործողի հատուկ կարիքների
Սենսորը հարմար է ամենախստապահանջ կիրառությունների համար, քանի որ այն անզգայուն է թափառող լույսի, ջրի և փոշու նկատմամբ (IP67) և անձեռնմխելի է էլեկտրամագնիսական ճառագայթման (EMC) նկատմամբ:
Հզոր գործառույթով։
01. դիրքի և շեղման ուղղում
Դիրքորոշման և շեղման ուղղման ֆունկցիան օգտագործվում է տարբեր աշխատանքային մասերի ճկուն եռակցման սցենարների համար՝ նույն մոդելով, բայց անհամապատասխան հանդուրժողականությամբ: Այս ֆունկցիան ապահովում է, որ աշխատանքային մասերը փոխելու ժամանակ ձեռքով միջամտություն չի պահանջվում, և ռոբոտն առաջնորդվում է դիրքավորման և շեղումների ուղղման համակարգով՝ ճշգրիտ եռակցման հասնելու համար,
Երկու կետանոց դիրքավորում, որը հարմար է ուղիղ գծի 2D օֆսեթ եռակցման համար:
Բազմակետային դիրքավորում Հարմար է բազմասեգմենտային 2d օֆսեթ եռակցման համար
Սեգմենտի դիրքավորումը Հարմար է բազմաբաժնի 3d օֆսեթ եռակցման համար:
02 Իրական ժամանակի հետևում
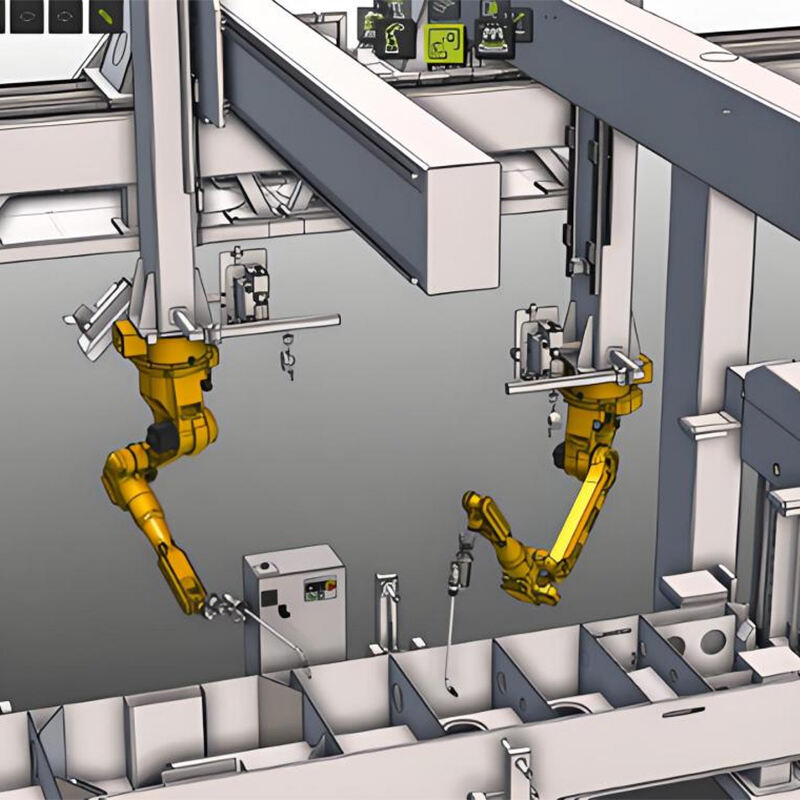
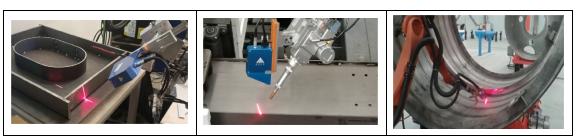
Իրական ժամանակում հետևելու գործառույթն օգտագործվում է եռակցման այնպիսի սցենարներում, որոնք պահանջում են բարձր արդյունավետություն և ոչ տարածական միջամտություն: Սենսորը ամրացված է եռակցման ջահի համեմատ, և եռակցման ջահը ավտոմատ կերպով կարգավորում է եռակցման ուղին ըստ 3D կոորդինատների տվյալների:
03. Սկանավորում և ավտոմատ զոդում
Սկանավորման և ավտոմատ եռակցման գործառույթը թույլ է տալիս սենսորին նախ հավաքել եռակցման երկրաչափական տեղեկատվությունը: Այս գործառույթը հարմար է բարձր անդրադարձնող, նեղ եռակցման տարածքների և եռակցման բարդ սցենարների համար:
Լազերային կարերի հետևում
Laser Seam Tracking-ը կարող է հայտնաբերել բարձր, ցածր և ձախ և աջ եռակցման շեղումները:
Կարող է հայտնաբերել միաձուլման զոդում փոքր բացերով:
Լուծեք եռակցման կարի հետևման խնդիրը բարակ թիթեղների միացման համար:
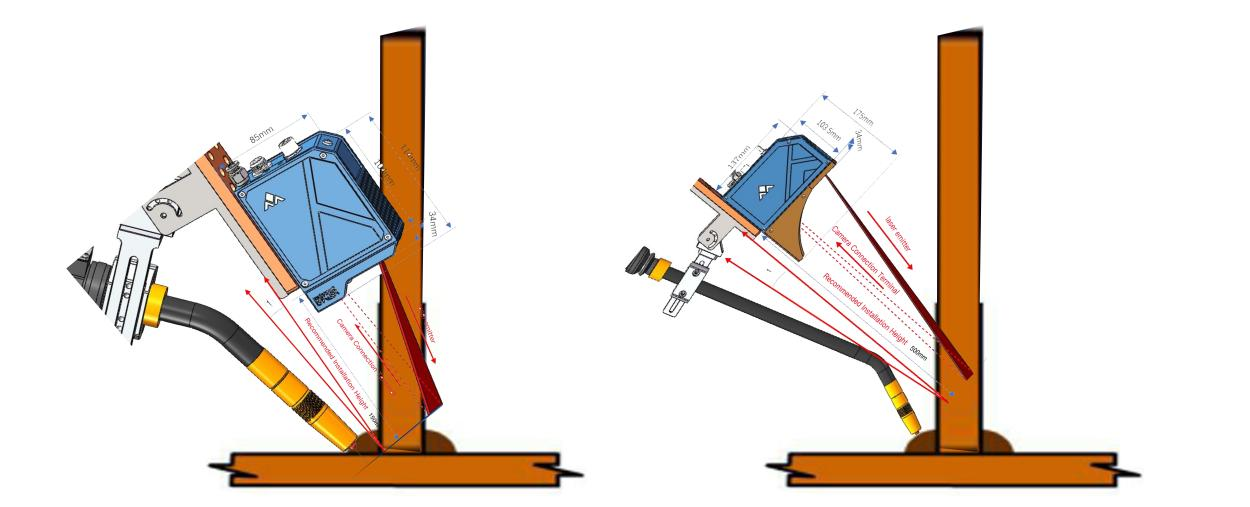
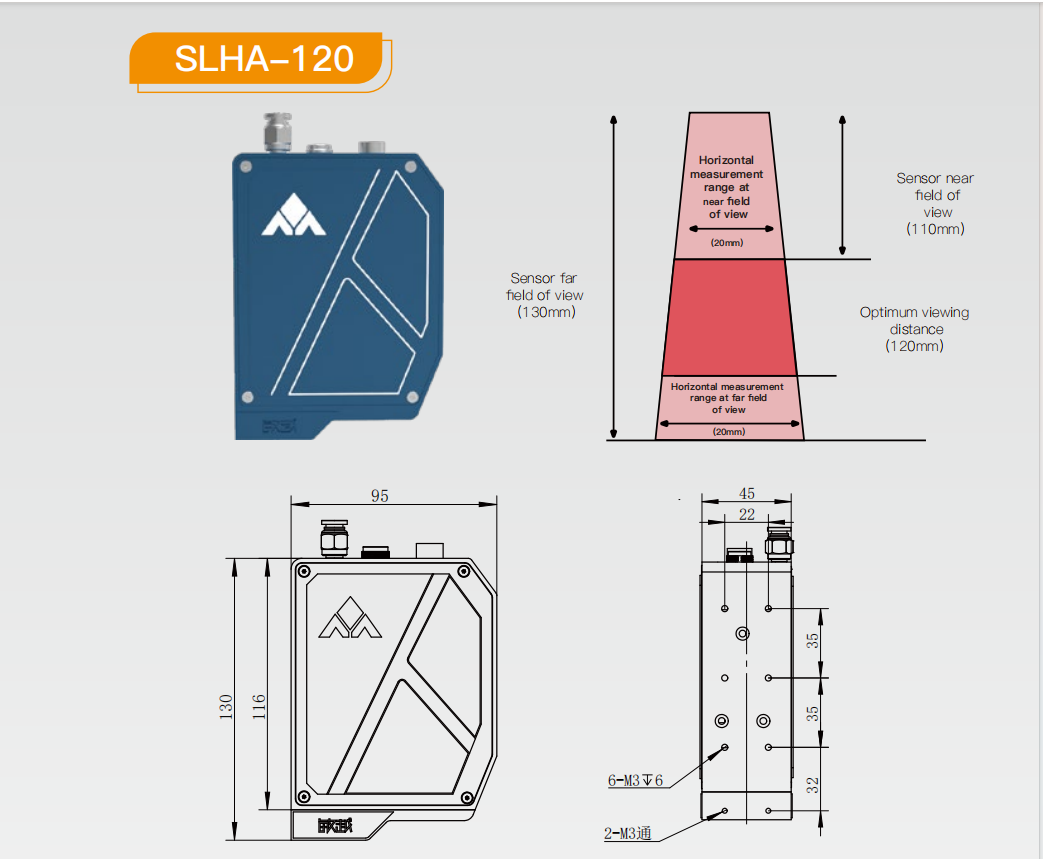
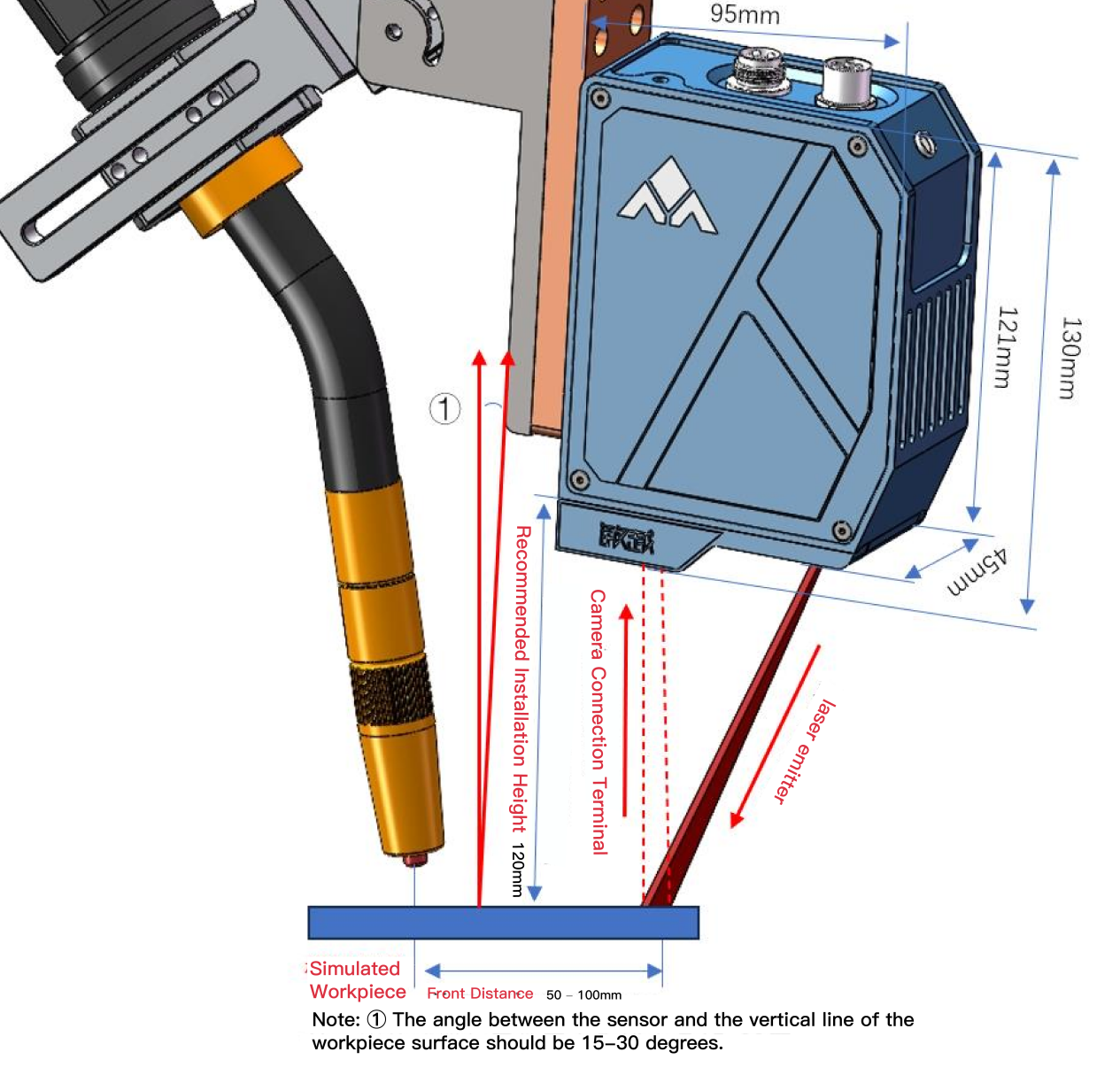
Օպտիմալ դիտարկման հեռավորությունը մոտ 120 մմ է:
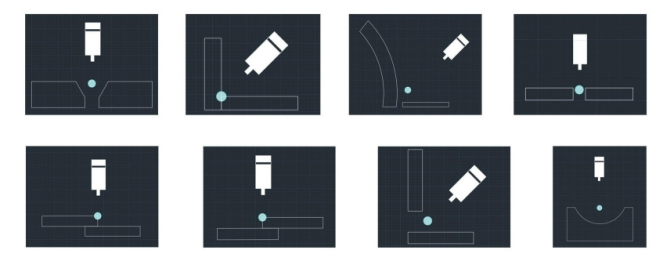
Աջակցման եռակցման տեսակը
V-ակոսով զոդում
Ֆիլետային զոդում
Հեմինգ զոդում
Splicing զոդում
Լապերի զոդում և այլն:
Բարձր ճշգրտությամբ, զրոյական եռակցման զոդում: հարմար է չժանգոտվող պողպատից եռակցված արդյունաբերության համար:
Խնդրում ենք ողջամտորեն ընտրեք տեսակը՝ ըստ կիրառման իրական շրջանակի, որպեսզի խուսափեք աշխատանքային մասի բախման սենսորից, ռոբոտի բեռնվածությունը սովորաբար պետք է 20 կգ: