 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



WRP-220 Laser szövetségi érzékelő
Pozíciókereséssel, valós idejű nyomon követéssel, skennelés és automatikus összefonás funkcióval.
- Áttekintés
- Támogatott robot márkák
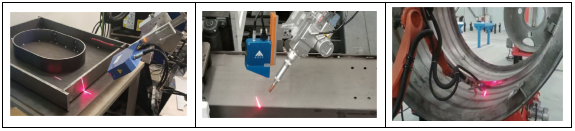
A laser szövőkövető érzékelő laserrel irradiálja a szövés felületét, hogy egy laserfényvonalat hozzon létre, amelyet egy magas-biztonsági kamera fogad és képez le. Algoritmikus feldolgozás segítségével a szövés háromdimenziós jellemzőit strukturált információkba alakítjuk át, beleértve a szövési csomópont koordinátái, elterjedését, és az űreket. Ez az információ továbbítva lesz a robot-vezérlőhöz, amely a robotnak biztosítja a szükséges trajektória- és folyamatparamétereket a szövéshez, irányítja a robotot, hogy valós időben szövészen vagy munkaadó eltérések korrigálására szolgáljon, és tökéletes szövési munkát érjen el. Más megoldásokhoz viszonyítva a laser szövőkövetésnek van a nem kapcsolatos, magas pontosságú, gyors sebességű és jó alkalmazkodási képességű előnye.
A szenzor lineáris strukturált fényes mérést alkalmaz, amely gyors vonalásfelvételi sebességgel rendelkezik, nem kapcsolatba lép és nem tartalmaz mechanikus mozgást; Erős alkalmazkodási képesség, képes villamoszövetségi paraméterek kimenetére; Teljesen beágyazott, külső ipari számítógépekkel való együttműködésben, és sok más előnnyel, amely széles körben használatos különböző típusú automatizált villamoszövetségben. Függetlenül a villamoszövetségi folyamatoktól, megbízható támogatást és stabil teljesítményt nyújtunk, hogy kiváló eredményeket érjünk el különböző villamoszövetségi helyzetekben.
Az érzékelő alkalmas a legexigensebb alkalmazásokra, mivel fénytörésre, vízre és porra (IP67) nem reagál, és immun az elektromos zavarok ellen (EMC).
Erős funkciókkal rendelkezik.
01. pozíció és eltérés korrigálása
A pozícionálási és elhelyezési korrekciós funkció használatos különböző munkatétel-egységek rugalmas összefonódási forgatókönyveiben, amelyek ugyanabban a modellben vannak, de eltérő toleranciákkal rendelkeznek. Ez a funkció biztosítja, hogy a munkatétel-egységek felváltásakor nem szükséges manuális beavatkozás, és a robotot a pozícionálási és elhelyezési korrekciós rendszer irányítja pontos összefonódáshoz.
Két pontú pozícionálás, alkalmas egyenes vonalú 2D eltolási összefonódáshoz.
Többpontos pozícionálás, alkalmas több szakaszos 2D eltolási összefonódáshoz.
Szakaszpozícionálás, alkalmas több szakaszos 3D eltolási összefonódáshoz.
02 Valós idejű nyomon követés
A valós idejű nyomon követési funkció használatos olyan összefonódási forgatókönyvekben, amelyek nagy hatékonyságot igényelnek és nem engedélyeznek térbeli zavarokat. A szenzor rögzített helyzetben van a összefonó tüskéhez viszonyítva, és a összefonó tűz automatikusan alkalmazza az összefonási útvonalakat a 3D koordinátádat alapján.
03. Távolságmérés és Automatikus összefonás
A szkenelés és automatikus összefonó funkció lehetővé teszi a szenzor számára, hogy először gyűjtsön geometriai információkat a fonókapcsolatokról. Ez a funkció alkalmas magas-reflektáló, szűk fonóterületekhez és bonyolult fonóesetekhez.
Lézeres vonalkövető
A lézeres vonalkövető felismeri a fonó elhelyezkedési hibákat felfelé, lefelé, balra és jobbra.
Kicsi rést találóan képes felismerni a fonókapcsolatokat.
Megoldást kínál a vékonylapos kapcsolatok fonójáték követésére.
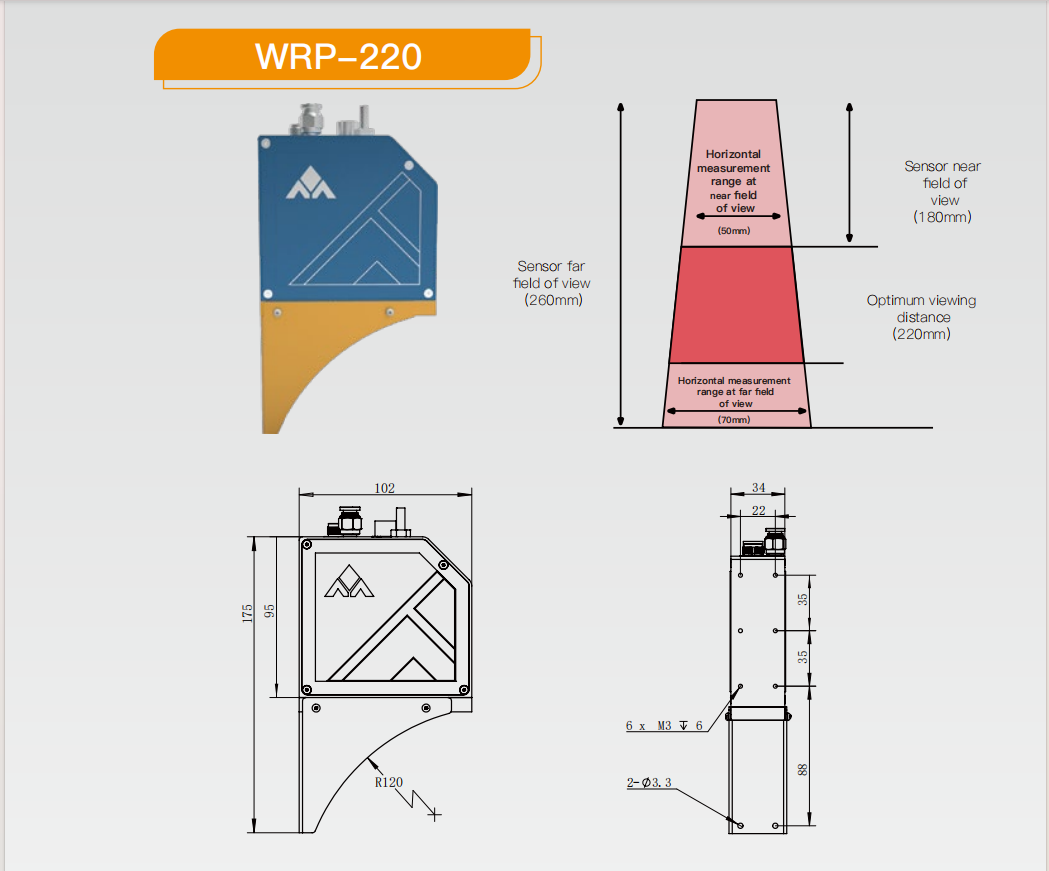
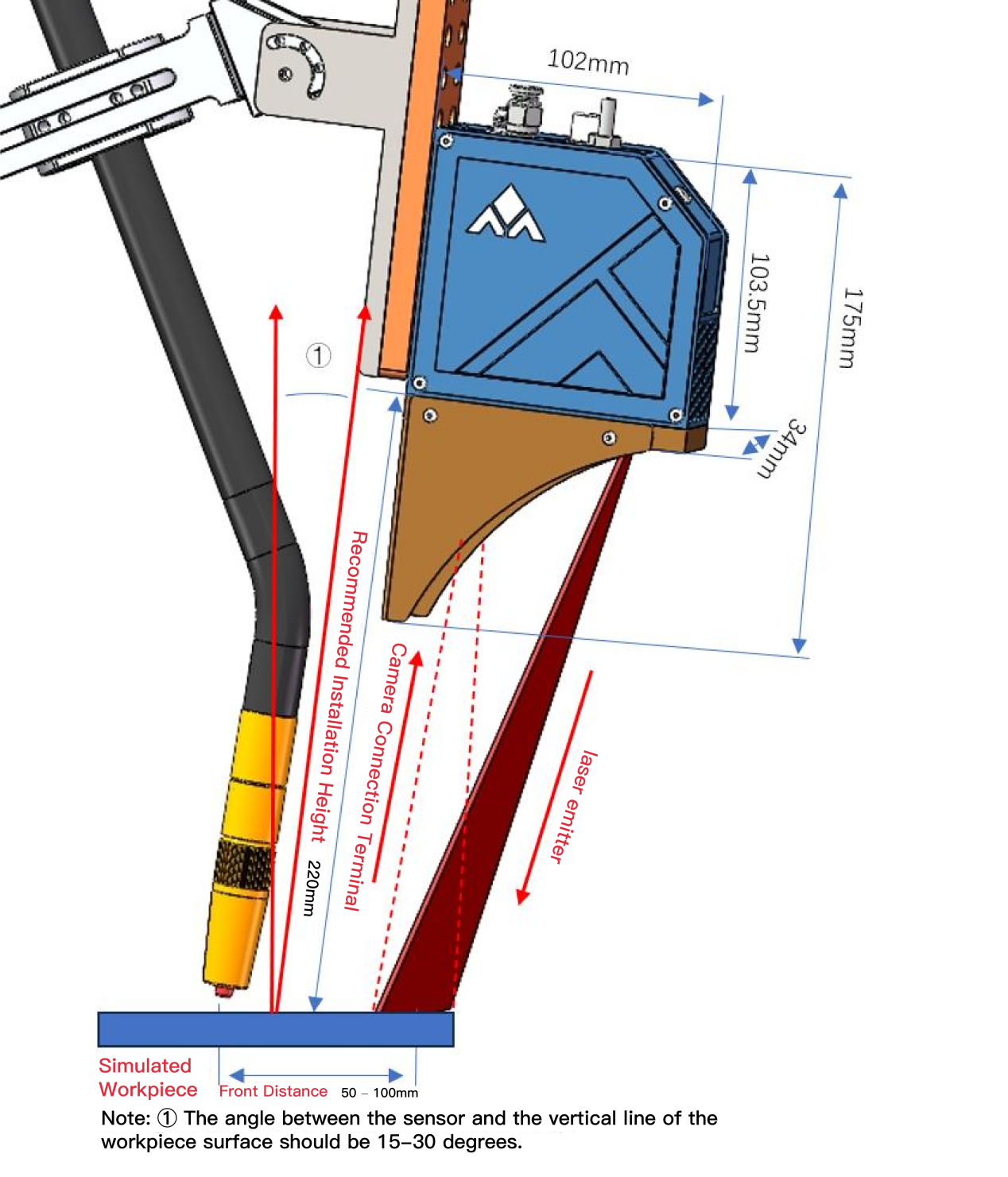
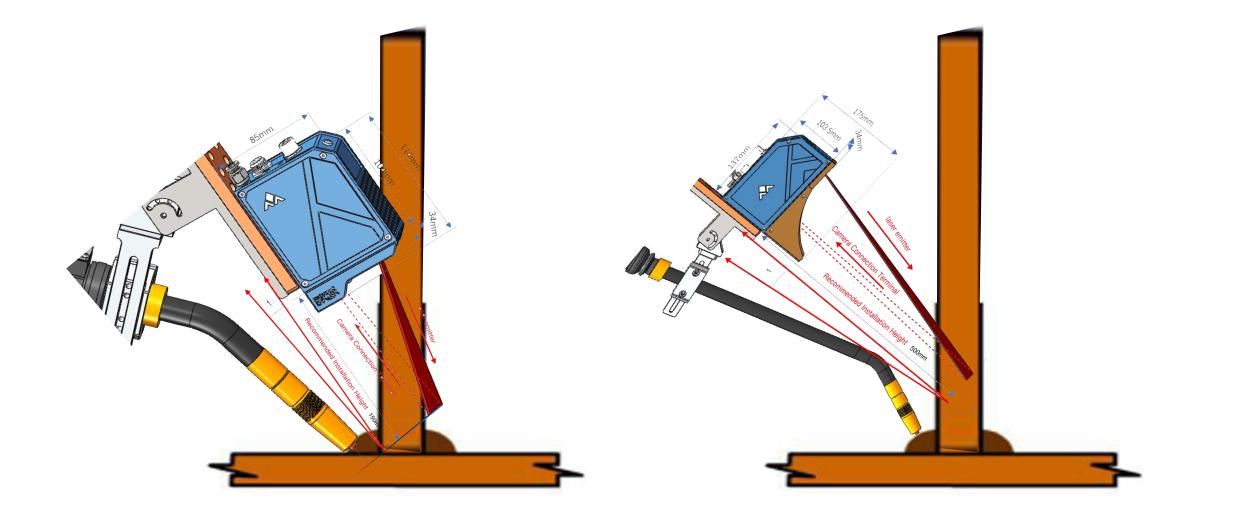
A legoptimálisabb megfigyelési távolság kb. 220 mm.
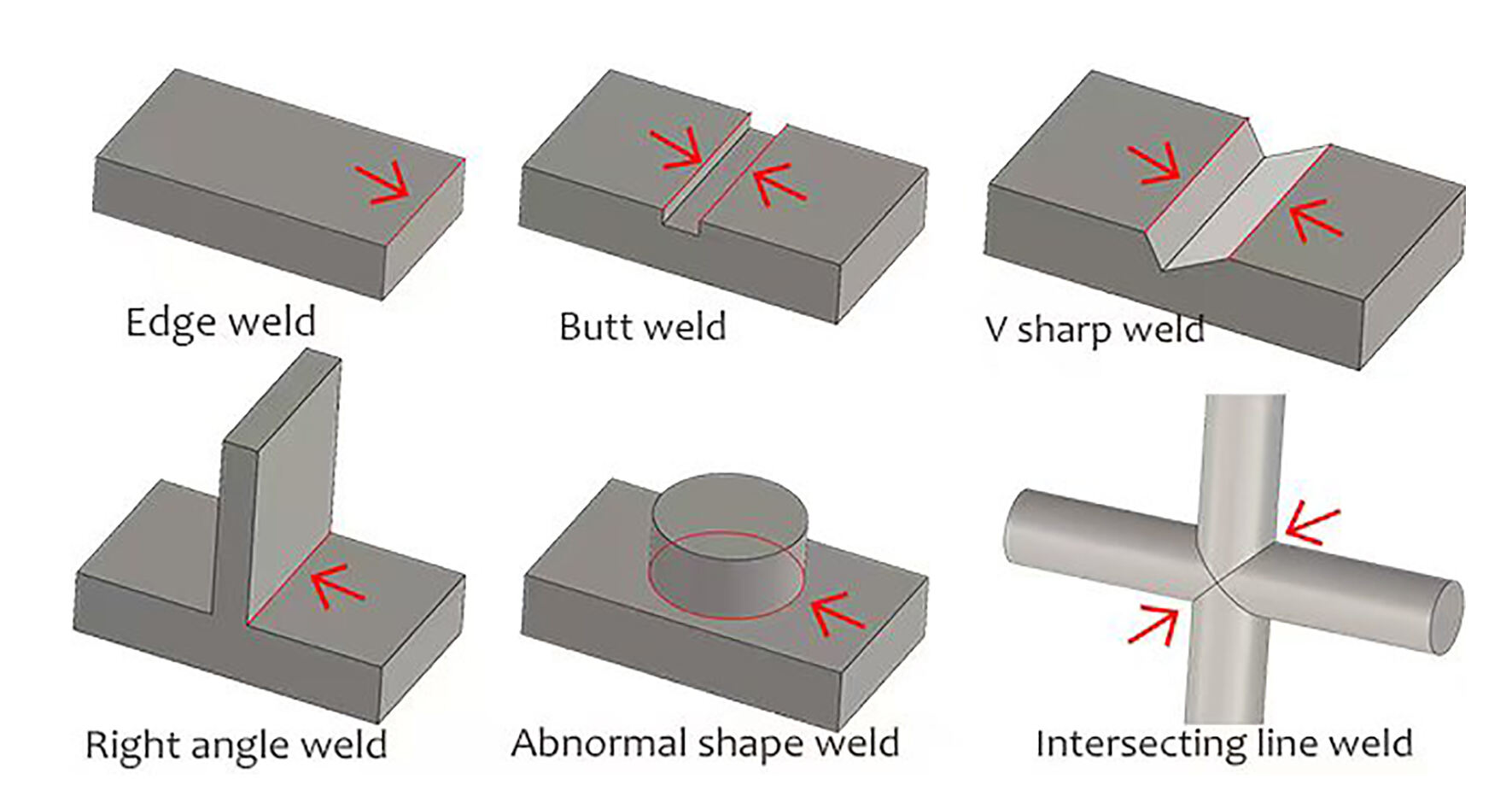
Támogatott fonó típus
V alakú fonó
Sarku fonó
Lapfelső fonó
Csatlakoztatásos összavar
Tömlővarak, stb.
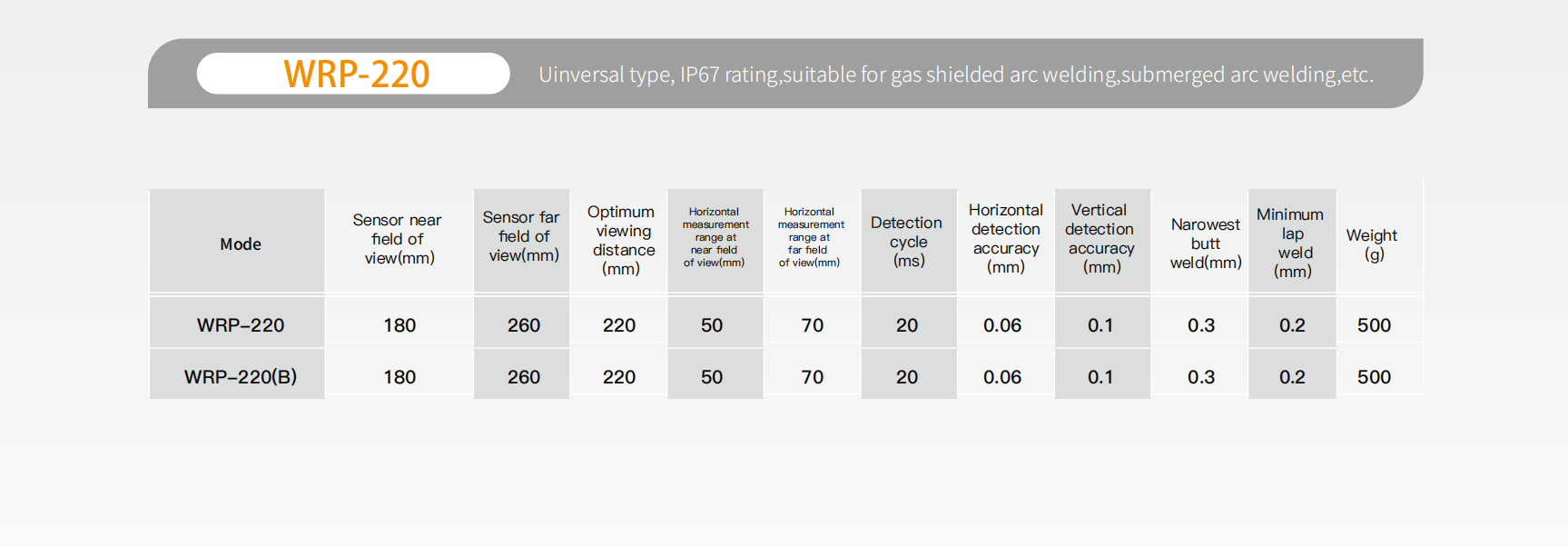
Univerzális modell, IP67 védőosztály, alkalmas gázvédett szövésre, bevonatkozó szövésre stb. munkakörnyezethez.
Kérjük, válassza ki a típust tekintetbe véve az aktuális alkalmazási területet, hogy elkerülje a munkatermek érintkezését a szenzorral, általánosan a robot terhelése legalább 20KG kell legyen.
Együttműködő partner

Támogatott robot márkák







