 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK



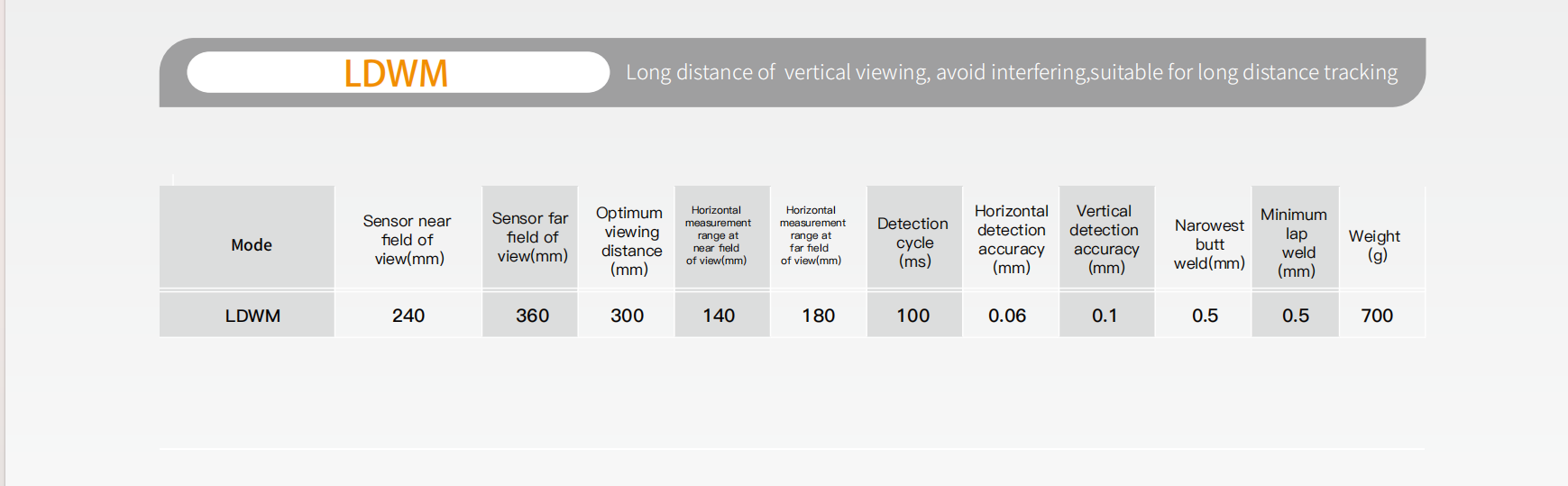
LDWM Laser senzor praćenja šava
Sa pronaći poziciju, stvarnim vremenskim praćenjem, skeniranjem i automatskom funkcijom svarenja
- Pregled
- Podržana robota brend
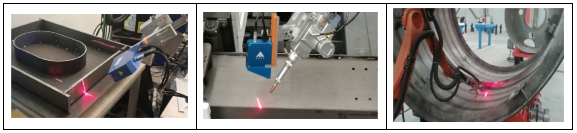
Senzor za praćenje vratnog šava koristi laser za osvjetljenje površine vratnog šava kako bi stvorio laserovu svjetlobnu traku, koja se prikuplja i slikajući visokim rezolucijom kamerom. Putem algoritamske obrade, trodimenzionalne značajke vratnog šava transformiraju se u strukturirane informacije, uključujući koordinate spojnica, pomake, praznine itd. Ove informacije se prenose kontroleru robota, koji pruža robotu potrebne trajektorije i procesne parametre za svarivanje, vodeći robota da svari ili ispravi odstupanja radnog dijela u realnom vremenu, postižeći savršeno svarivačko zadatak. U usporedbi s drugim rješenjima, praćenje vratnog šava laserm je neposredno, ima visoku točnost, brz je i dobro se prilagođava.
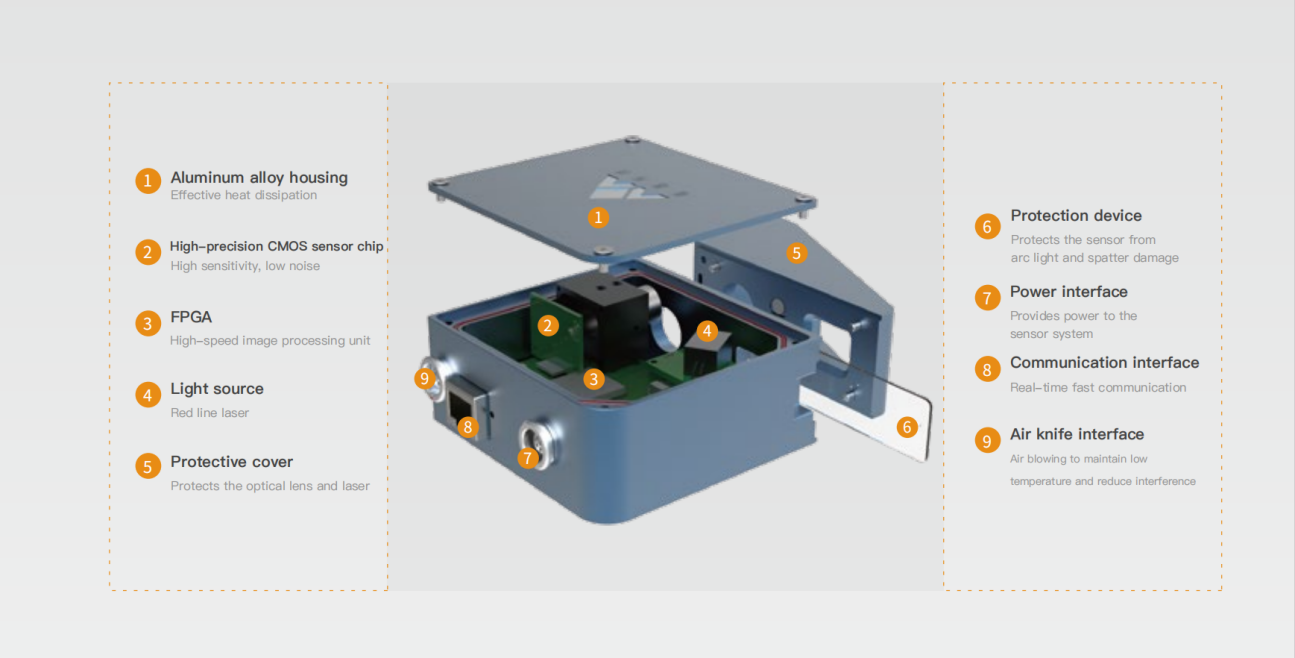
Senzor koristi linearno strukturirano svjetlo za mjerenje, što ima brzu linijnu brzinu snimanja, bez dodira i bez mehaničkog pokretanja; Jaka prilagodljivost, sposobna izvesti parametre za svarivanje; Potpuno ugrađeno, s vanjskim industrijskim računalima i mnogim drugim prednostima, široko se koristi u različitim vrstama automatskog svarivanja. Bez obzira na postupak svarivanja, možemo pružiti pouzdanu podršku i stabilnu performansu kako bismo osigurali odlične rezultate u različitim situacijama svarivanja.
Senzor je prilagođen za najzahtjevnije primjene, jer je neosjetljiv na strane svjetlost, vodu i prašinu (IP67) i imun na elektromagnetsku radijaciju (EMC).
Sa Moćnom Funkcijom.
01. pozicioniranje i ispravljanje odstupanja
Funkcija pozicioniranja i ispravljanja odstupanja koristi se za fleksibilne scenarije svarivanja različitih radnih dijelova istog modela ali s neusklađenim tolerancijama. Ova funkcija osigurava da pri promjeni radnih dijelova nije potrebno ručno zasaganje, a robot je vodjen sustavom za pozicioniranje i ispravljanje odstupanja kako bi se postiglo precizno svarivanje.
Pozicioniranje u dvije točke koje je pogodno za ravne 2D pomake svarivanja.
Višetaktne pozicije Odgovaraju višeposegmentnim 2D spojevima s pomakom
Pozicioniranje segmenta Odgovaraju višeposegmentnim 3D spojevima s pomakom.
02 Stvarno-vremenski praćenje
Funkcija stvarno-vremenskog praćenja koristi se u scenarijima za svarenje gdje su potrebna visoka učinkovitost i nepostojeće prostorne interferencije. Senzor je fiksiran u odnosu na svarku, a svarka automatski prilagođava putanju svarenja prema 3D koordinatnim podacima.
03. Skeniranje i automatsko svarenje
Funkcija skeniranja i automatskog svarenja omogućuje da senzor prvo prikupi geometrijske informacije o spojevima. Ova funkcija je odgovarajuća za visoko reflektirajuće, uske prostore za svarenje i kompleksne scenarije svarenja.
Laser praćenje spoja
Laser praćenje spoja može otkriti devijacije spoja gore-dolje i lijevo-desno.
Može otkriti spojeve s malim razmacima.
Riješava problem praćenja spojeva za tankoplancno spajanje.
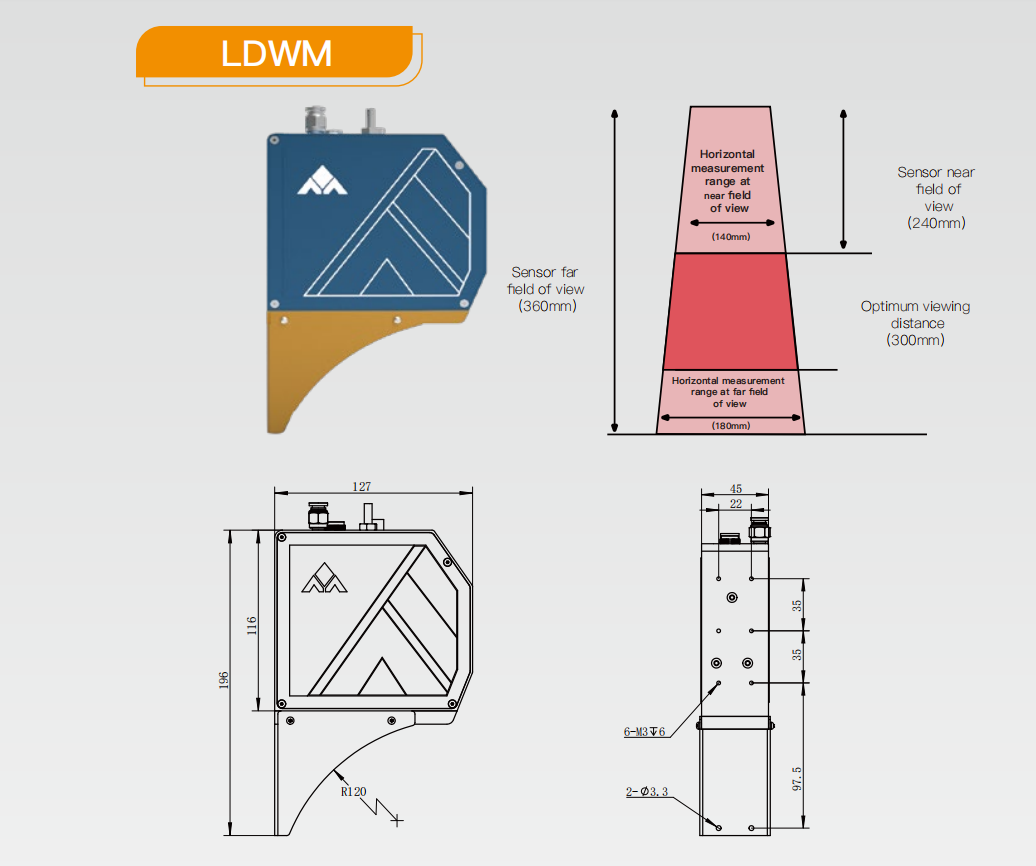
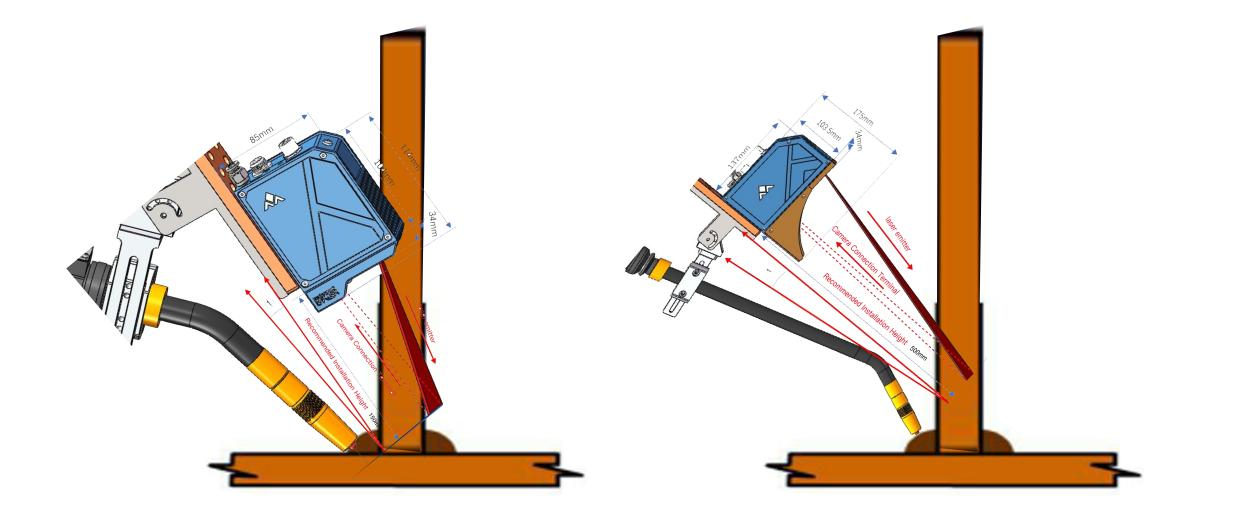
Optimalna udaljenost promatranja iznosi otprilike 300 mm.
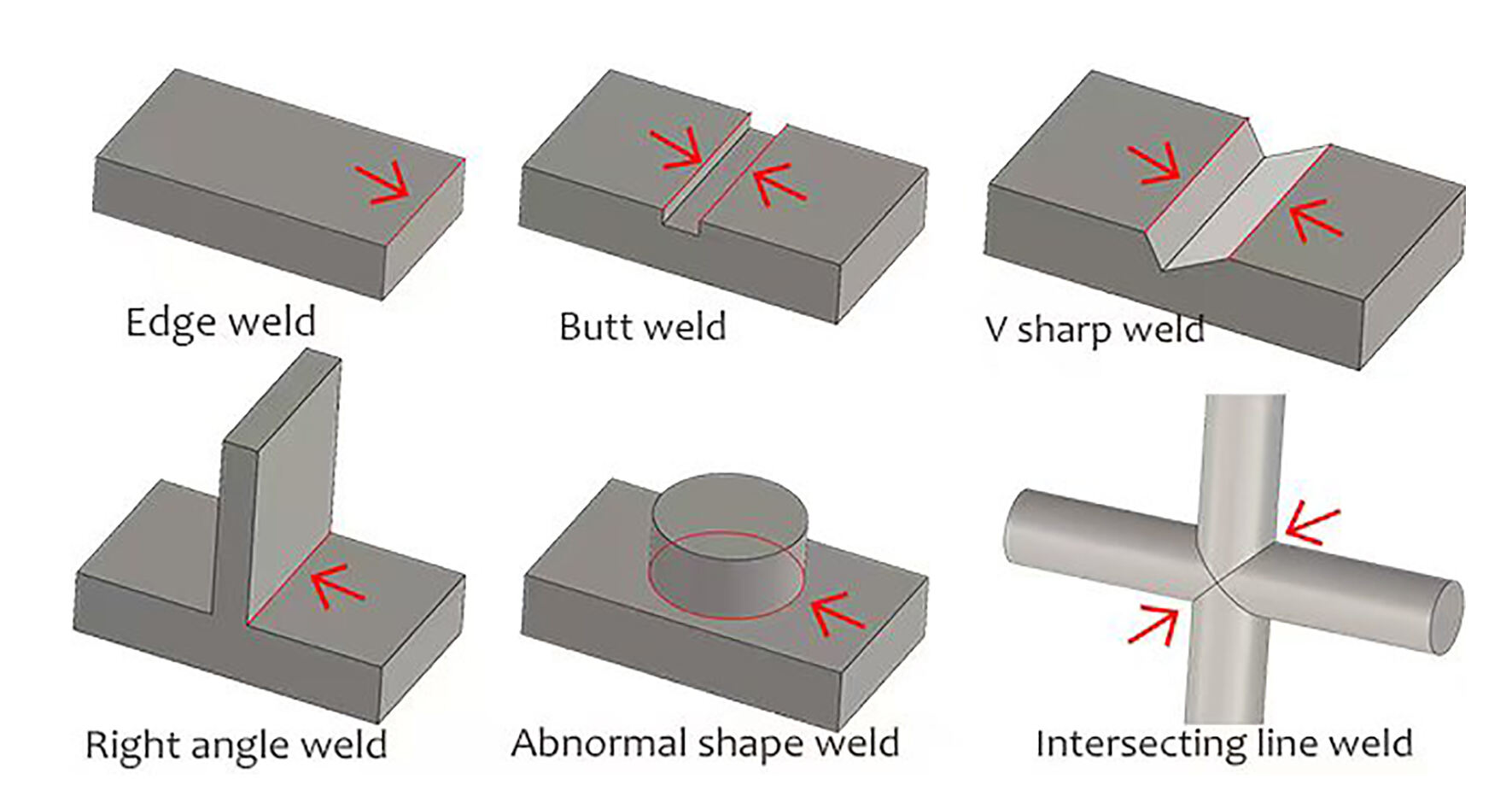
Vrsta spajanja za podršku
Spajanje V-kanavkom
Klinasto spajanje
Spajanje hemingom
Spajanje šavicama
Preklapajuće spajanja itd.
Duga razdaljina vertikalnog gledanja, širok pregled, izbjegavanje interferencije, odgovara za čeljustreni i građevinski strojarstvo. 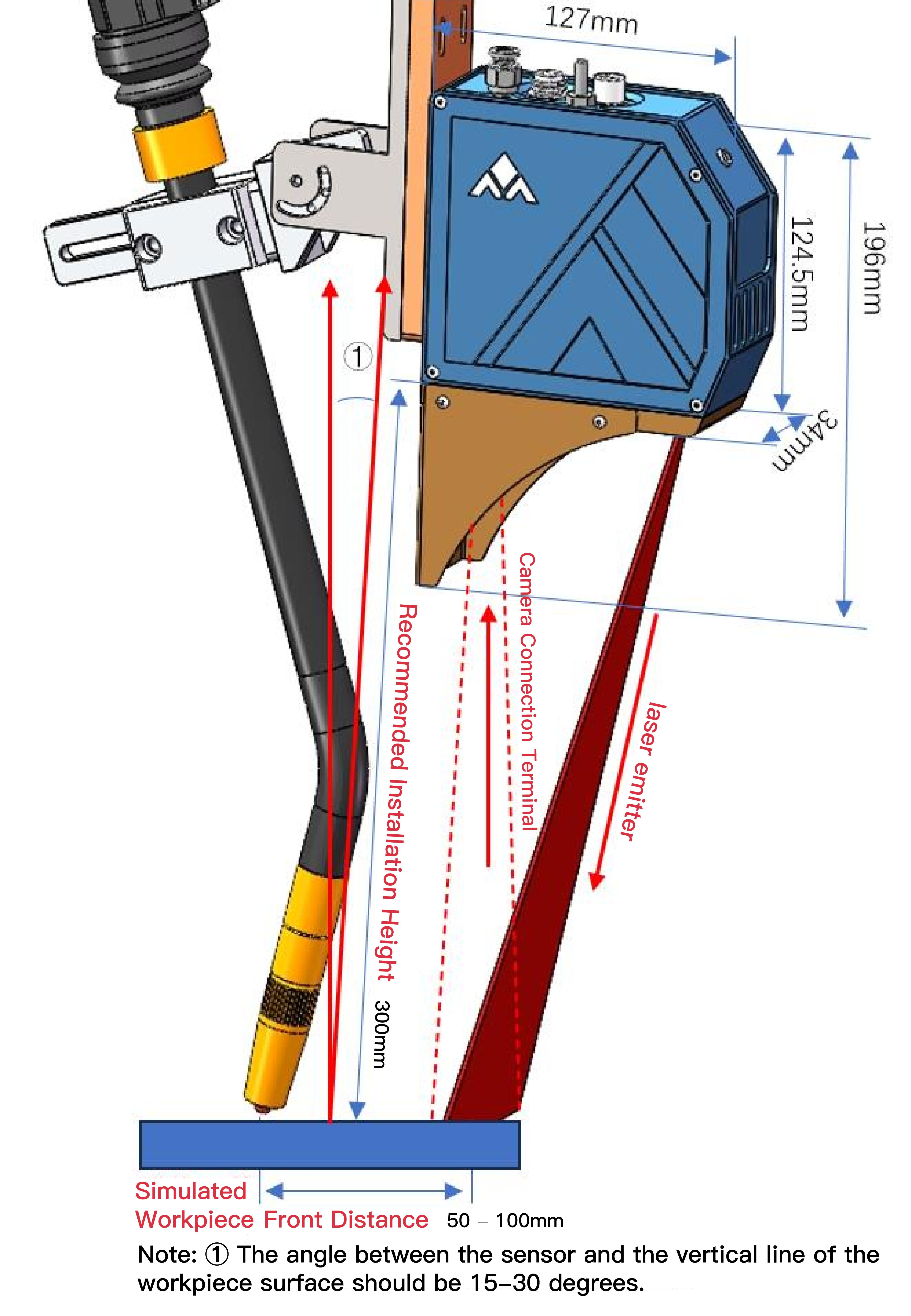
• Izaberite vrstu razumno prema stvarnom opsegu primjene kako biste izbjegli sudaranje radnog dijela s senzorom; opterećenje robota obično normalno treba biti 20KG.
Kooperativni partner

Podržana robota brend







