EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


कोई प्रोग्राम नहीं इंटेलिजेंट रोबोटिक वेल्डिंग स्टेशन
“Beijing Minyue Technology Co., Ltd ”चीन की अग्रणी उच्च-प्रौद्योगिकी उद्यम के रूप में गैर- शिक्षा बुद्धिमान औद्योगिक रोबोट . स्व-विकसित RobotSmart-बुद्धिमान निर्णय लेने वाले प्रणाली, SmartVision- दोनों आँखों वाले संरचित प्रकाश दृष्टि प्रणाली, SmartEye - लेजर सीम ट्रैकिंग प्रणाली पर केंद्रित सुप्लियर, फ्लेक्सिबल मैन्युफैक्चरिंग नए पीढ़ी के बुद्धिमान रोबोट गैर-शिक्षण वेल्डिंग और कटिंग समाधान प्रदान करता है।
हमारा कंपनी में ग्राफिक्स और स्वचालन के क्षेत्रों से मास्टर्स और डॉक्टरेट वाले तकनीकी विशेषज्ञों की एक अंतःशाखा R&D टीम है। उनमें से 90% से अधिक के पास मास्टर्स डिग्री या उससे ऊपरी डिग्री है।
रोबोट नियंत्रण, एल्गोरिदम और मानव-रोबोट इंटरएक्शन में विशेषज्ञ, हम वैश्विक निर्माण उद्योग को बेहतर रोबोटिक्स बुद्धिमान समाधान प्रदान करने के लिए प्रतिबद्ध हैं।
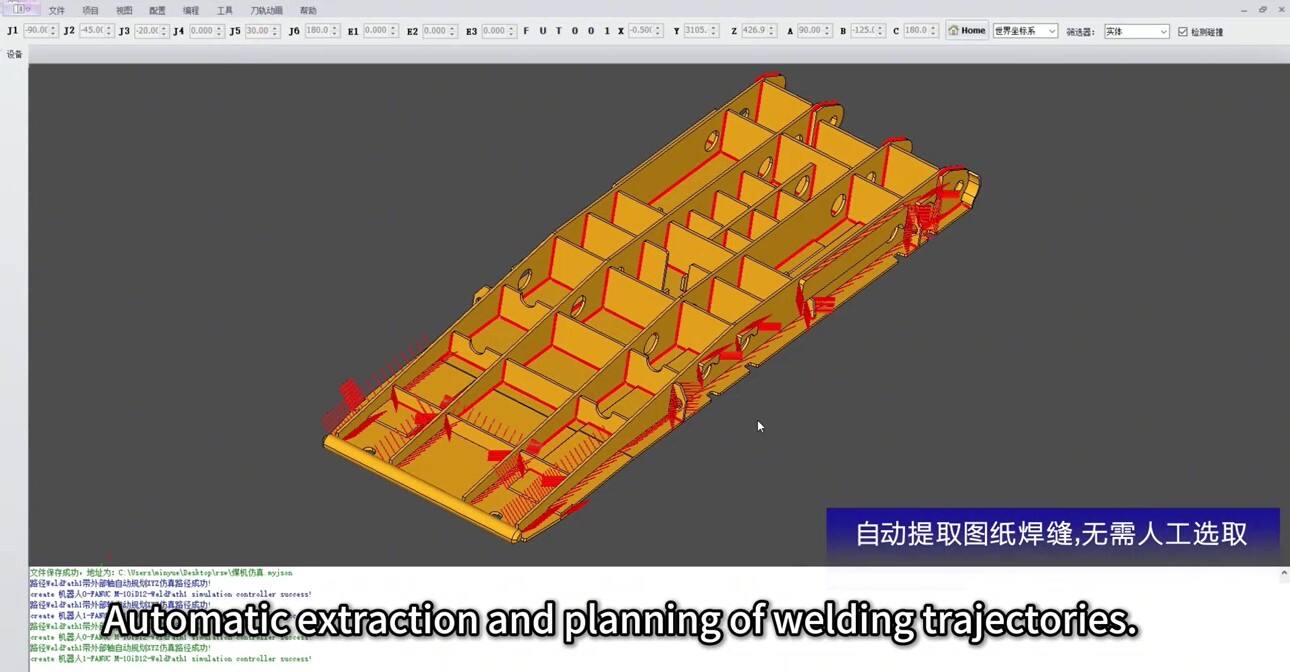
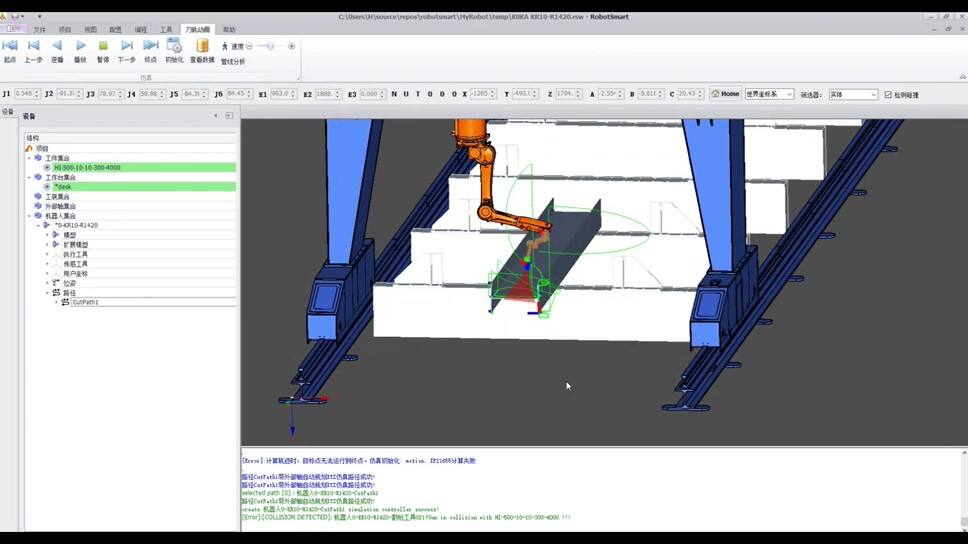
जब उपयोगकर्ता RobotSmart- बुद्धिमान निर्णय लेने वाले प्रणाली में 3D कार्य खंड मॉडल को आयात करता है, तो सॉफ्टवेयर तेजी से और स्वचालित रूप से औद्योगिक रोबोट चलन कोड उत्पन्न कर सकता है, और एक साथ रोबोट चलन सिमुलेशन, संघटना परीक्षण, बाधा ट्रेजेक्टरी प्लानिंग, एकलता बचाव और अक्ष सीमा परीक्षण जैसी कार्यक्षमताओं को सक्रिय कर सकता है, जिससे पारंपरिक जटिल और अकारगर निर्माण प्रोग्रामिंग प्रक्रिया से बचा जा सके।
नई दिशा की ओर बढ़ते हुए, उद्योग की समस्याओं का समाधान करते हुए।
कोयला मशीन उद्योग हाइड्रॉलिक समर्थन वेल्डिंग समस्याएं, औद्योगिक अपग्रेड पर प्रभाव
कोल मशीनरी उद्योग में सामान्यतः उपयोग की जाने वाले हाइड्रॉलिक सपोर्ट के मुख्य संरचनात्मक भागों का वजन 20 टन से अधिक हो सकता है। इनमें से अधिकांश पर मध्यम-मोटे प्लेटों से वेल्ड किए गए बॉक्स-आकार के संरचनात्मक भाग होते हैं। यह हाइड्रॉलिक सपोर्ट का मुख्य भाग होता है जो भारी भार और प्रहार सहन करता है। हाइड्रॉलिक सपोर्ट में छोटे, तीन-आयामी क्रॉस वेल्ड्स प्रमुख होते हैं।
1,000 से अधिक वेल्ड्स .और अधिकांश मध्यम-मोटे प्लेटों की बहुल-लेयर, बहु-पास वेल्डिंग होती है। वेल्डिंग सीमेंट होती है, वेल्डिंग की पहुंचनीयता कम होती है, और इसकी वेल्डिंग गुणवत्ता सीधे खनिज क्षेत्र के सुरक्षित उत्पादन पर प्रभाव डालती है।
इसकी संरचना की विशेषता और प्रक्रिया की जटिलता के कारण, हाथ से वेल्डिंग वेल्डिंग की स्थिरता और वेल्डिंग गुणवत्ता की एकसमानता को गारंटी नहीं दे सकती।
सामान्य रोबोटिक वेल्डिंग का उपयोग करके।
- शिक्षा प्रोग्रामिंग, r रोकथाम की आवश्यकता होती है और रोबोट का उपयोग कम होता है।
- संरचना जटिल है, फ्रेमों के भीतर फ्रेम होते हैं और विभिन्न आकारों के होते हैं, और 1,000 से अधिक वेल्ड्स होते हैं, की आवश्यकता होती है 5 दिन लगते हैं शिक्षण हाथ से प्रोग्राम करें।
- कार्य खंड की स्थिति और सभा की सटीकता मानदंडों को पूरा नहीं कर सकती है, और केंद्रित वेल्डिंग क्षेत्र की गर्मी से हुई विकृति वेल्ड को विस्थापित करती है।
- पूरे हाइड्रॉलिक की रोबोट वेल्डिंग स्वचालन को वास्तव में करना बहुत कठिन है समर्थन संरचना खंड।
कोयला मशीन उद्योग में एक प्रमुख कंपनी, मिन्युए तकनीक के एक-बटन स्टार्ट, शिक्षण-रहित बुद्धिमान वेल्डिंग समाधान का अपनाना।
चरण 1: हमारे ग्राहक रोबोटस्मार्ट - बुद्धिमान निर्णय प्रणाली में 3D कार्य खंड मॉडल को आयात करते हैं।
चरण 2: रोबोटस्मार्ट-बुद्धिमान निर्णय-ग्रहण प्रणाली, जो त्वरित रूप से सूचना प्रौद्योगिकी रोबोट त्रयी ऑटोमेटिक रूप से उत्पन्न कर सकती है, और एक साथ रोबोट गति सिमुलेशन, संघटना परीक्षण, एकलता बचाव और धुरी सीमा परीक्षण कर सकती है।
कदम 3: SmartVision-3D बाइनोक्यूलर संरचित प्रकाश दृश्य तंत्र कार्य के लिए ग्रस्स पोज़ीशनिंग करता है। 3D बाइनोक्यूलर संरचित प्रकाश दृश्य तंत्र कार्य की सतह को स्कैन करता है और बिंदु जलवाफ से विपरीत मॉडेलिंग करता है। मॉडेलिंग की सटीकता के भीतर कार्य की सतही विशेषताओं को पुन: प्राप्त करें ± 5mm। सभी कार्य के लिए समुदाय और प्रारंभिक पोज़ीशनिंग की खोज की सटीकता 40 mm के भीतर ,सभी कार्यों के लिए समुदाय कोण की खोज की सटीकता 10 °। वेल्ड लंबाई में 30 mm (समायोजनीय) के भीतर परिवर्तन का पता लगाएं 。
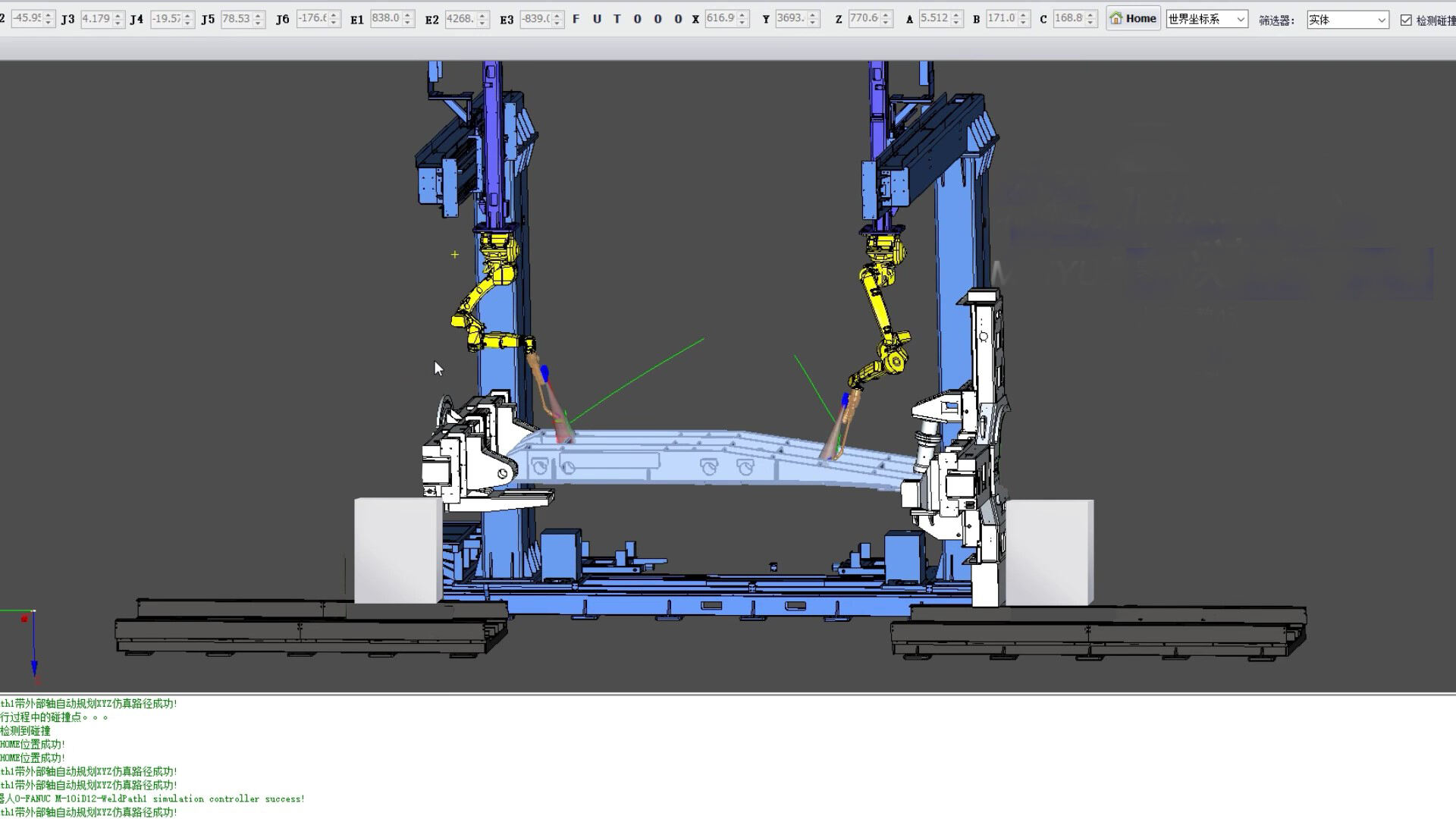
कदम 4: SmartEye - लेज़र दृश्य ट्रैकिंग सिस्टम। वेल्ड सीम को स्कैन करना, वेल्ड सीम की स्थिति और जानकारी की पुष्टि करना, 3D डिजिटल मॉडल और वास्तविक कार्य वेल्ड सीम स्थिति को सही करना, और वास्तविक वेल्ड सीम स्थिति डेटा प्राप्त करना। बहु-रोबोट, बहु-बाहरी-अक्ष, और पोजिशनर सहयोगी कार्य करता है।
SmartVision-3D बाइनोक्यूलर संरचित प्रकाश दृश्य तंत्र 3D मॉडल ड्रॉइंग आयात कर रहा है ,प्राप्त 3D बिंदु बदल डेटा को 3D डिजिटल मॉडल के साथ तुलना की जाती है ,रोबोट केवल 3D पॉइंट क्लाउड डेटा के साथ वेल्डिंग करता है। जब सेंसर द्वारा प्राप्त पॉइंट क्लाउड डेटा नई घटकों के साथ अपग्रेड करने के बाद काम के टुकड़े के 3D मॉडल से मेल खाता है, तो अपग्रेड किए गए घटकों को वेल्डिंग किया जाता है।
वास्तविक रूप से एक बटन शुरू करके उत्पादन, 2 मिनट में चार्क स्टार्टिंग करने के लिए, तेज, सटीक, पूरी तरह से बिना कार्यक्रम, उच्च कार्यक्षमता और उच्च सटीकता।
तकनीकी नेतृत्व, उद्योग का ध्यान।