EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK


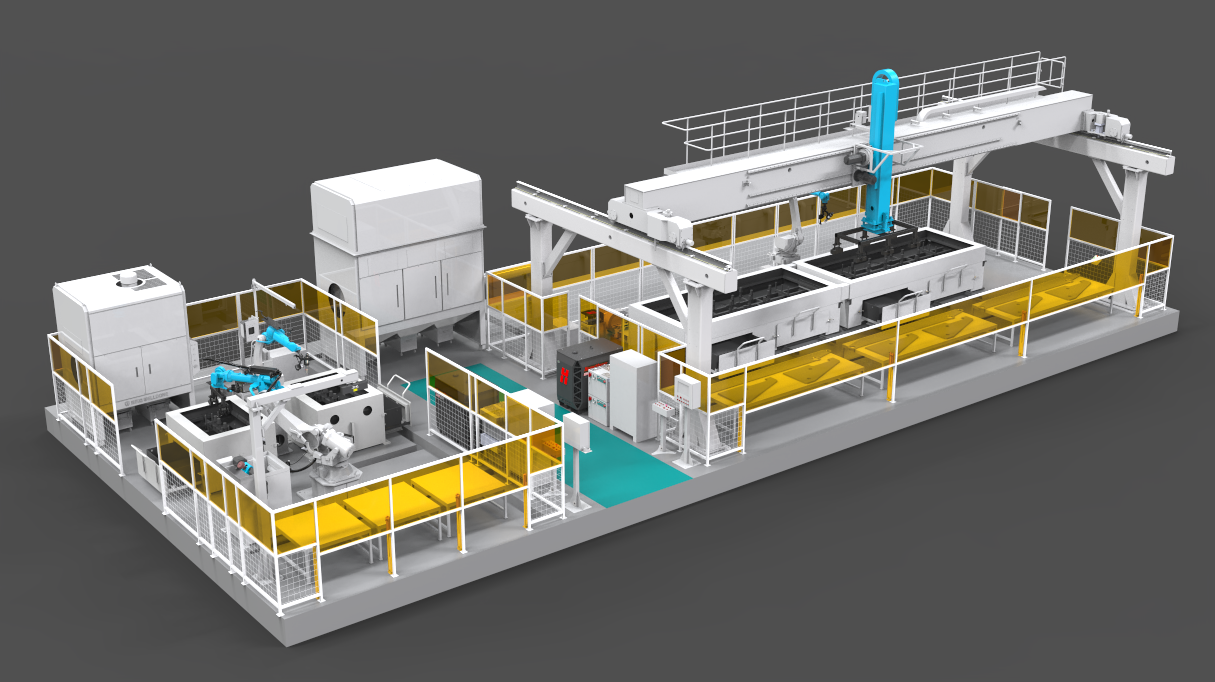
ماشین بردازش پلاسما و شعله روباتیک هوشمند.
محدوده کار:
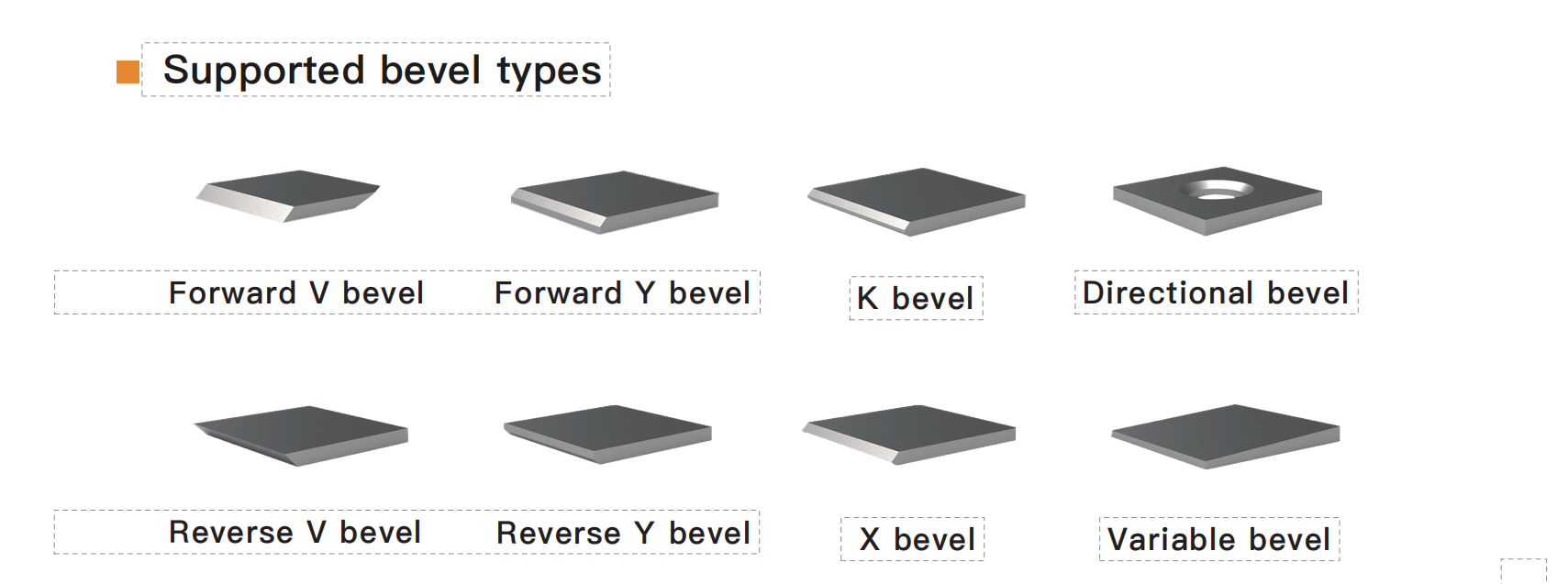
شیب مثبت: 100x100-1000x1000mm@20-45°
گودال معکوس: 100x100-800x800mm@40-60°

بریدن گودال هوشمند بدون آموزش
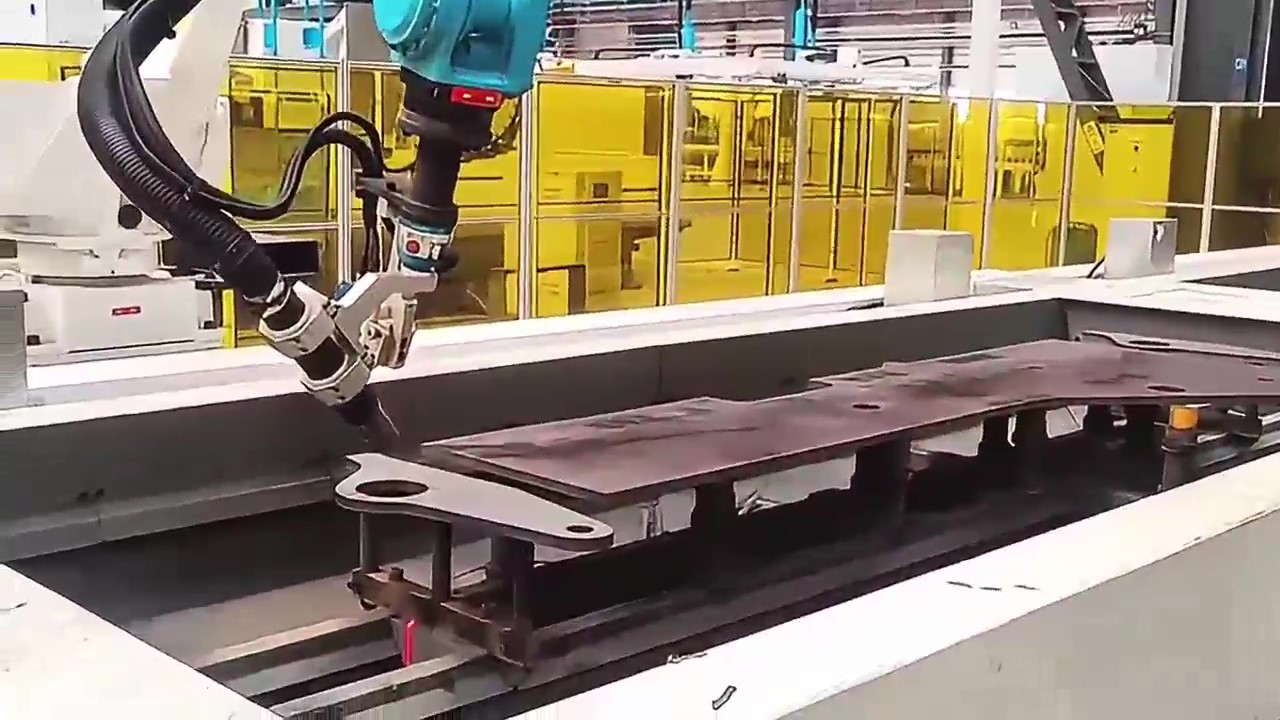
برش و جوشکاری شیبدار در فرآیند اولیه، مسائل کیفیت و کارایی میتوانند به طور مستقیم باعث بottle neck تولید شوند. این موضوع به ویژه در برش شیبدار قطعات کوچک صادق است. در حال حاضر برای برش شیبدار قطعات کوچک، روش سنتی برش فلش مورد استفاده قرار میگیرد که نیازمند خطکشی پیشین، قرار دادن قطعه و برش شیبدار با وسیله فلش است و نیاز به فضای کار کوچک دارد و هر بار که قطعه کار تغییر کند، نیاز به بازگرمایش مجدد دارد. بنابراین، در فرآیند برش فلش سنتی، مشکلاتی مانند عدم یکسانی در برش شیبدار، کیفیت ضعیف، کارایی پائین، نیاز به نیروی کار بیشتر و محدودیت در محدوده کاربرد وجود دارد.
فناوری MINYUE TECHNOLOGY از سیستم هوشمند برش گوشه با استفاده از سیستم تصمیمگیری هوشمند RobotSmart و سیستم دید سه بعدی SmartVisions و سیستم ردیابی لیزری SmartEye برای بهرهبرداری از برش گوشه هوشمند بدون برنامهریزی استفاده میکند. این روش، چالشهای تولیدی ناشی از دشواری در برنامهریزی و سطح پایین هوشمندی را حل کرده و همزمان نیازهای برش دستههای کوچک قطعات مختلف را برآورده میسازد و کارایی و درصد عملیات موفق را افزایش میدهد.
در برابر وظایف پیچیدهتر و تنوع بیشتر، فقط سه مرحله وجود دارد.
۱. وارد کردن فایلهای CAD DXF؛ ۲. برنامهریزی سریع مسیر؛ ۳. تولید خودکار برنامههای برش، سپس وظیفه برش به سرعت انجام میشود.
بهینهسازی خودکار مسیر برش، برنامهریزی هوشمند مسیرهای گوشه، بدون برش معکوس گوشههای بالا و پایین.
دوربین دوربینی تصاویر میگیرد تا موقعیت قطعه کار را تشخیص دهد و برای گرفتن و قرار دادن روی میز برش عمل کند. پس از تکمیل برش، CNC به کار برای برش روی میز میرود و قطعه را گرفته میشود. چندین قطعه کار همزمان سازگار هستند و مسیر برش به طور خودکار برنامهریزی میشود. محدوده برش از 0.5 تا 4 متر است. این فرآیند به طور قابل توجهی کارایی و امنیت کار را افزایش میدهد. از فرآیند برش شعله و فرآیند برش پلاسما پشتیبانی میکند.
انواع مختلف حالتهای بارگذاری و خالی کردن را پشتیبانی میکند: بارگیری و خالی کردن دستی، بارگیری و خالی کردن با رافعه تکپاره، بارگیری و خالی کردن با رافعه حرکتی، بارگیری و خالی کردن همکاری دو ربات و بارگیری و خالی کردن CNC.
 فرآیند تولید
فرآیند تولید
● موقعیتیابی اولیه قطعه کار روی میز برش به صورت دستی (تکرارپذیری موقعیت قطعه در حدود ±5mm).
● تولید اولیه از طریق نرمافزار برای انتخاب موقعیت برش، مسیر برش و پارامترهای فرآیند به صورت خودکار تولید میشود، برنامه تولید شده میتواند در سیستم کنترل ذخیره شود و در تولیدات بعدی میتواند مستقیماً فراخوانی شود. (RobotSmart میتواند از طریق سیستم پلتفرم تصمیمگیری هوشمند در 15-20 دقیقه پیادهسازی شود.)
● ربات برش از حسگر بینایی لیزری برای موقعیتیابی دقیق قطعه استفاده میکند. (مزیت: کارایی و دقت بیشتر نسبت به یافتهکنندههای لبه مخاطب).
● حمایت از ایستگاه کار ربات نوع ریل زمینی، گیتی و تکپله.
● معرفی 12 راهحل برای سناریوهای کاربردی قطعهای.
انواع شیبها پشتیبانی شده