همه ما میدانیم که کار با رباتها میتواند پیچیده باشد، اما وقتی اطلاعات مناسبی دارید و تمرین کافی انجام دادهاید، میتواند بسیار آسان باشد. MINYUE در اینجاست تا شما را درباره مدیریت ربات آموزش دهد و بهترین روش ممکن را ارائه کند. این راهنمای نحوه عملیات را پوشش میدهد سیستم مدیریت ربات , چگونگی کنترل حرکات آنها و چگونه میتوان این کار را به صورت ایمن و کارآمد انجام داد.
ابتدا، همه چیز درباره انواع مختلف روباتها. دو نوع اصلی روبات وجود دارد که باید آنها را بشناسید: روباتهای ثابت و روباتهای متحرک. وقتی از روباتهای ثابت صحبت میکنیم، این روباتها هستند که اصلاً حرکت نمیکنند. آنها معمولاً در کارخانجات برای انجام وظایفی مثل جمعآوری قطعات استفاده میشوند. در مقابل، روباتهای متحرک برای ناوبری در محیطها و تغییر مکان طراحی شدهاند. این روباتها نوعی روبات متحرک هستند که معمولاً برای ارسال یا تمیزکاری استفاده میشوند. درک تفاوت بین این نوعها به شما اجازه میدهد انتخاب صحیح را انجام داده و روبات مناسب برای کاری که باید انجام دهید، انتخاب کنید.
حالا بیایید در مورد کنترل ربات MINYUE صحبت کنیم. رابط پایهای که برای جابجایی ربات استفاده میشود، میتواند یک جویستیک یا سری دکمهها باشد که برای کنترل حرکت در همه جهات میتوانند به کار روند. تمرین با کنترلها اهمیت زیادی دارد تا با نحوه حرکت و پاسخگویی ربات آشنایی پیدا کنید. ربات میتواند با نوشتن قطعاتی از دستورالعملها که به آن کد میگویند، برنامهریزی شود. این کد دستورالعملهایی به ربات میدهد که چگونه باید حرکت کند و چه وظایفی را انجام دهد. برای تسلط بر رباتها، نیاز است برنامهنویسی را که یک مهارت اصلی امروزه است، فرا بگیرید.
نیاز به اینکه روباتها به صورت پیچیده حرکت کنند نیز وجود دارد، و این مسئله میتواند پیچیدهتر باشد. چون برخی از این کارها بسیار پیچیده هستند، ما سعی میکنیم آنها را به قطعات قابل مدیریت تجزیه کنیم. به عنوان مثال، فرض کنید میخواهید یک روبات را از یک طرف اتاق به طرف دیگر ببرید. شاید باید ابتدا روبات را مجدداً جهتدهی کنید تا مطمئن شوید که به سمت صحیح نگاه میکند. سپس آن را به جلو کشیده و بعد باید چرخش دهید تا به محل مورد نظر برسد. این موضوع MINYUE رباتهای خودکار حمل و نقل مواد را ساده میکند که روبات را کنترل کنید. میتوانید از حسگرها نیز استفاده کنید، که این امکان را به روبات میدهد تا محیط خود را درک کند. حسگرها به روبات کمک میکنند تا از موانع دور بماند و به طور کلی حرکت آن را سلسازند، که کار شما به عنوان عملکرد دهنده را آسانتر میکند.

هر زمانی که صرف اجتناب از تسلط بر کار با ربات میکنید، زمانی است از دست رفته. و هرچه بیشتر تمرین کنید، بیشتر به ربات آشنایی پیدا میکنید و اعتماد به نفس بیشتری در کنترل آن خواهید داشت. میتوانید همچنین مهارتهای خود را با ریز تنظیم برنامهریزی ربات بهبود بخشید. این میتواند تغییرات کوچکی در کدی که برای کنترل ربات نوشتهاید اعمال کند تا حرکات آن بهتر و کارآمدتر شود. با تمرین مداوم و انجام تغییرات لازم وقتی که نیاز است، مهارتهای شما در کار با گرمکار دستروبروی رباتیک به طور قابل توجهی بهبود خواهد یافت.

هنگامی که با رباتها سر و کار دارید، امنیت یکی از اولویتهای برتر است. همیشه قوانین و رویههای امنیت را دنبال کنید تا خودتان و دیگران در امان باشید. وقتی با رباتها کار میکنید، بهتر است به محیط اطراف خود توجه داشته باشید، زیرا آنها گاهی اوقات بدون اخطار حرکت میکنند. برای بهینهسازی عملیات، مطمئن شوید که ربات مناسب برای انجام وظیفه مورد نیاز فعالیت میکند. به عنوان مثال، اگر نیاز به جابجایی اشیاء سنگین دارید، باید از رباتی استفاده کنید که برای حمل و نقل بارهای سنگین طراحی شده باشد. همچنین، سنسورها و خودکارسازی میتوانند به شما اجازه بدهند که با کمترین زمان و انرژی بیشتر کار انجام دهید. خودکارسازی میتواند بخشی از کار را برای شما انجام دهد تا زمان بیشتری صرف ذخیره کنید و کار خود را آسانتر کنید.
سریع، دقیق، کاملاً بدون برنامهنویسی، با کارایی و دقت بالا. این موضوع فرآیند آموزش پیچیده رباتهای سنتی را حل میکند و زمان دوبارهسازی فرآیند آموزش را صرفهجویی میکند.
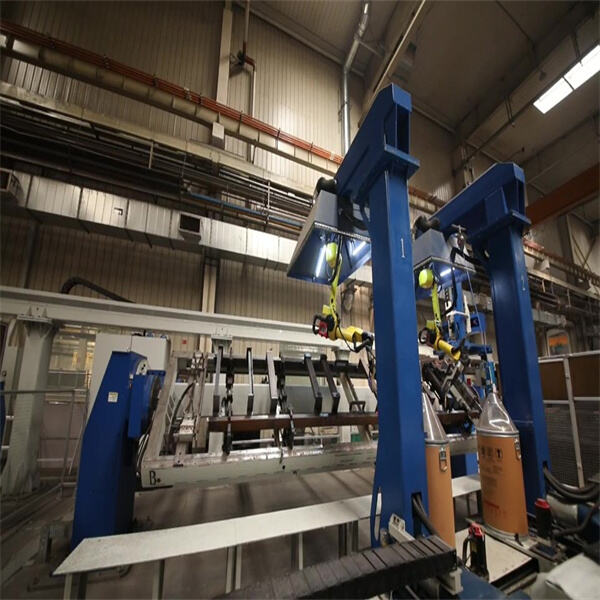
شرکت فناوری بجینگ مینیو، به عنوان بزرگترین شرکت فناوری پیشرفته جهان در حوزه کاربردهای هوشمند غیرآموزشی رباتهای صنعتی، تخصص خود را در تولید سیستمهای تولید هوشمند انعطافپذیر قرار میدهد. ما با سیستم تصمیمگیری هوشمند RobotSmart، سیستم بینایی هوشمند SmartVision - نور ساختاری دوچشمی، و سیستم ردیابی خط لیزری SmartEye - بینایی لیزری، راهحلهای جدیدی برای درمان و برش رباتهای هوشمند ارائه میدهیم.
فراهم کردن ربات درمان قدرتمند با بارگذاری از جلو، بارگذاری از طرفین، بارگذاری معکوس، نصب گنتری، برنامهریزی مسیر هوشمند برای چندین ربات، چند محور خارجی و پوزیشنر برای همکاری در کار. به منظور شبیهسازی حرکت ربات، تشخیص تصادف، اجتناب از تکینگی و تشخیص محدودیت محور.
استفاده از عملکرد یافتن و ردیابی، اسکن شwen ناخص، تأیید موقعیت و اطلاعات ناخص، اصلاح موقعیت ناخص بین نقشه طراحی سه بعدی دیجیتال و قطعه واقعی، و حل مشکل ناخص عرضی ناشی از خطا در مواد ورودی و تغییر شکل گرمایی.
 EN
EN
 AR
AR
 HR
HR
 NL
NL
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 TL
TL
 IW
IW
 ID
ID
 LV
LV
 LT
LT
 SR
SR
 SK
SK
 UK
UK
 VI
VI
 GL
GL
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 AF
AF
 MS
MS
 MK
MK
 HY
HY
 AZ
AZ
 KA
KA
 UR
UR
 BN
BN
 LA
LA
 MN
MN
 KK
KK









